 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAPRPose: Mask-Aware Proposal and Amodal Refinement for Multi-Object 6D Pose Estimation
Apr 22, 20266D object pose estimation in cluttered scenes remains challenging due to severe occlusion and sensor noise. We propose MAPRPose, a two-stage framework that leverages mask-aware correspondences for pose proposal and amodal-driven Region-of-Interest (ROI) prediction for robust refinement. In the Mask-Aware Pose Proposal (MAPP) stage, we lift 2D correspondences into 3D space to establish reliable keypoint matches and generate geometrically consistent pose hypotheses based on correspondence-level scoring, from which the top-$K$ candidates are selected. In the refinement stage, we introduce a tensorized render-and-compare pipeline integrated with an Amodal Mask Prediction and ROI Re-Alignment (AMPR) module. By reconstructing complete object geometry and dynamically adjusting the ROI, AMPR mitigates localization errors and spatial misalignment under heavy occlusion. Furthermore, our GPU-accelerated RGB-XYZ reprojection enables simultaneous refinement of all $N \times B$ pose hypotheses in a single forward pass. Evaluated on the BOP benchmark, MAPRPose achieves a state-of-the-art Average Recall (AR) of 76.5%, outperforming FoundationPose by 3.1% AR while delivering a 43x speedup in multi-object inference.
A Clinical Point Cloud Paradigm for In-Hospital Mortality Prediction from Multi-Level Incomplete Multimodal EHRs
Apr 06, 2026Deep learning-based modeling of multimodal Electronic Health Records (EHRs) has become an important approach for clinical diagnosis and risk prediction. However, due to diverse clinical workflows and privacy constraints, raw EHRs are inherently multi-level incomplete, including irregular sampling, missing modalities, and sparse labels. These issues cause temporal misalignment, modality imbalance, and limited supervision. Most existing multimodal methods assume relatively complete data, and even methods designed for incompleteness usually address only one or two of these issues in isolation. As a result, they often rely on rigid temporal/modal alignment or discard incomplete data, which may distort raw clinical semantics. To address this problem, we propose HealthPoint (HP), a unified clinical point cloud paradigm for multi-level incomplete EHRs. HP represents heterogeneous clinical events as points in a continuous 4D space defined by content, time, modality, and case. To model interactions between arbitrary point pairs, we introduce a Low-Rank Relational Attention mechanism that efficiently captures high-order dependencies across these four dimensions. We further develop a hierarchical interaction and sampling strategy to balance fine-grained modeling and computational efficiency. Built on this framework, HP enables flexible event-level interaction and fine-grained self-supervision, supporting robust modality recovery and effective use of unlabeled data. Experiments on large-scale EHR datasets for risk prediction show that HP consistently achieves state-of-the-art performance and strong robustness under varying degrees of incompleteness.
VideoThinker: Building Agentic VideoLLMs with LLM-Guided Tool Reasoning
Jan 22, 2026Long-form video understanding remains a fundamental challenge for current Video Large Language Models. Most existing models rely on static reasoning over uniformly sampled frames, which weakens temporal localization and leads to substantial information loss in long videos. Agentic tools such as temporal retrieval, spatial zoom, and temporal zoom offer a natural way to overcome these limitations by enabling adaptive exploration of key moments. However, constructing agentic video understanding data requires models that already possess strong long-form video comprehension, creating a circular dependency. We address this challenge with VideoThinker, an agentic Video Large Language Model trained entirely on synthetic tool interaction trajectories. Our key idea is to convert videos into rich captions and employ a powerful agentic language model to generate multi-step tool use sequences in caption space. These trajectories are subsequently grounded back to video by replacing captions with the corresponding frames, yielding a large-scale interleaved video and tool reasoning dataset without requiring any long-form understanding from the underlying model. Training on this synthetic agentic dataset equips VideoThinker with dynamic reasoning capabilities, adaptive temporal exploration, and multi-step tool use. Remarkably, VideoThinker significantly outperforms both caption-only language model agents and strong video model baselines across long-video benchmarks, demonstrating the effectiveness of tool augmented synthetic data and adaptive retrieval and zoom reasoning for long-form video understanding.
DiffPixelFormer: Differential Pixel-Aware Transformer for RGB-D Indoor Scene Segmentation
Nov 17, 2025Indoor semantic segmentation is fundamental to computer vision and robotics, supporting applications such as autonomous navigation, augmented reality, and smart environments. Although RGB-D fusion leverages complementary appearance and geometric cues, existing methods often depend on computationally intensive cross-attention mechanisms and insufficiently model intra- and inter-modal feature relationships, resulting in imprecise feature alignment and limited discriminative representation. To address these challenges, we propose DiffPixelFormer, a differential pixel-aware Transformer for RGB-D indoor scene segmentation that simultaneously enhances intra-modal representations and models inter-modal interactions. At its core, the Intra-Inter Modal Interaction Block (IIMIB) captures intra-modal long-range dependencies via self-attention and models inter-modal interactions with the Differential-Shared Inter-Modal (DSIM) module to disentangle modality-specific and shared cues, enabling fine-grained, pixel-level cross-modal alignment. Furthermore, a dynamic fusion strategy balances modality contributions and fully exploits RGB-D information according to scene characteristics. Extensive experiments on the SUN RGB-D and NYUDv2 benchmarks demonstrate that DiffPixelFormer-L achieves mIoU scores of 54.28% and 59.95%, outperforming DFormer-L by 1.78% and 2.75%, respectively. Code is available at https://github.com/gongyan1/DiffPixelFormer.
DGFusion: Dual-guided Fusion for Robust Multi-Modal 3D Object Detection
Nov 13, 2025As a critical task in autonomous driving perception systems, 3D object detection is used to identify and track key objects, such as vehicles and pedestrians. However, detecting distant, small, or occluded objects (hard instances) remains a challenge, which directly compromises the safety of autonomous driving systems. We observe that existing multi-modal 3D object detection methods often follow a single-guided paradigm, failing to account for the differences in information density of hard instances between modalities. In this work, we propose DGFusion, based on the Dual-guided paradigm, which fully inherits the advantages of the Point-guide-Image paradigm and integrates the Image-guide-Point paradigm to address the limitations of the single paradigms. The core of DGFusion, the Difficulty-aware Instance Pair Matcher (DIPM), performs instance-level feature matching based on difficulty to generate easy and hard instance pairs, while the Dual-guided Modules exploit the advantages of both pair types to enable effective multi-modal feature fusion. Experimental results demonstrate that our DGFusion outperforms the baseline methods, with respective improvements of +1.0\% mAP, +0.8\% NDS, and +1.3\% average recall on nuScenes. Extensive experiments demonstrate consistent robustness gains for hard instance detection across ego-distance, size, visibility, and small-scale training scenarios.
Progressive Bird's Eye View Perception for Safety-Critical Autonomous Driving: A Comprehensive Survey
Aug 11, 2025Bird's-Eye-View (BEV) perception has become a foundational paradigm in autonomous driving, enabling unified spatial representations that support robust multi-sensor fusion and multi-agent collaboration. As autonomous vehicles transition from controlled environments to real-world deployment, ensuring the safety and reliability of BEV perception in complex scenarios - such as occlusions, adverse weather, and dynamic traffic - remains a critical challenge. This survey provides the first comprehensive review of BEV perception from a safety-critical perspective, systematically analyzing state-of-the-art frameworks and implementation strategies across three progressive stages: single-modality vehicle-side, multimodal vehicle-side, and multi-agent collaborative perception. Furthermore, we examine public datasets encompassing vehicle-side, roadside, and collaborative settings, evaluating their relevance to safety and robustness. We also identify key open-world challenges - including open-set recognition, large-scale unlabeled data, sensor degradation, and inter-agent communication latency - and outline future research directions, such as integration with end-to-end autonomous driving systems, embodied intelligence, and large language models.
Stable at Any Speed: Speed-Driven Multi-Object Tracking with Learnable Kalman Filtering
Aug 01, 2025Multi-object tracking (MOT) enables autonomous vehicles to continuously perceive dynamic objects, supplying essential temporal cues for prediction, behavior understanding, and safe planning. However, conventional tracking-by-detection methods typically rely on static coordinate transformations based on ego-vehicle poses, disregarding ego-vehicle speed-induced variations in observation noise and reference frame changes, which degrades tracking stability and accuracy in dynamic, high-speed scenarios. In this paper, we investigate the critical role of ego-vehicle speed in MOT and propose a Speed-Guided Learnable Kalman Filter (SG-LKF) that dynamically adapts uncertainty modeling to ego-vehicle speed, significantly improving stability and accuracy in highly dynamic scenarios. Central to SG-LKF is MotionScaleNet (MSNet), a decoupled token-mixing and channel-mixing MLP that adaptively predicts key parameters of SG-LKF. To enhance inter-frame association and trajectory continuity, we introduce a self-supervised trajectory consistency loss jointly optimized with semantic and positional constraints. Extensive experiments show that SG-LKF ranks first among all vision-based methods on KITTI 2D MOT with 79.59% HOTA, delivers strong results on KITTI 3D MOT with 82.03% HOTA, and outperforms SimpleTrack by 2.2% AMOTA on nuScenes 3D MOT.
MiniMax-M1: Scaling Test-Time Compute Efficiently with Lightning Attention
Jun 16, 2025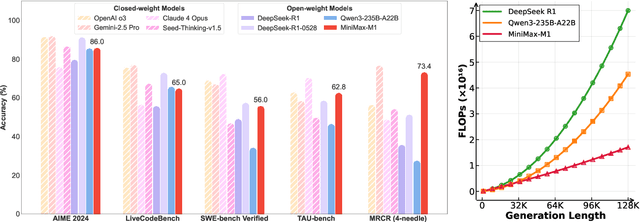

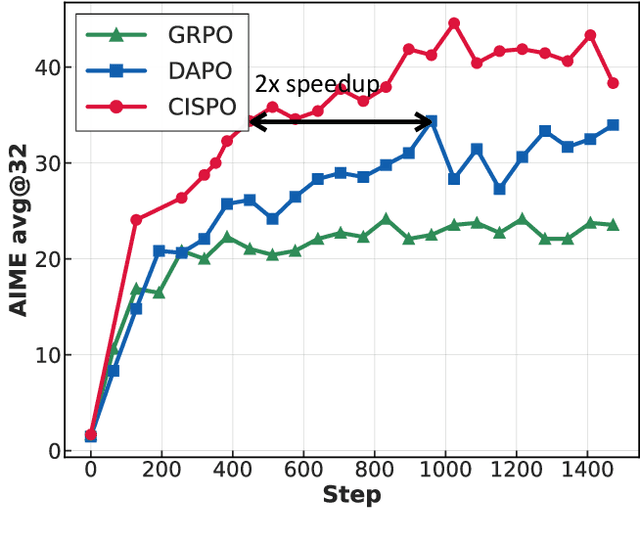
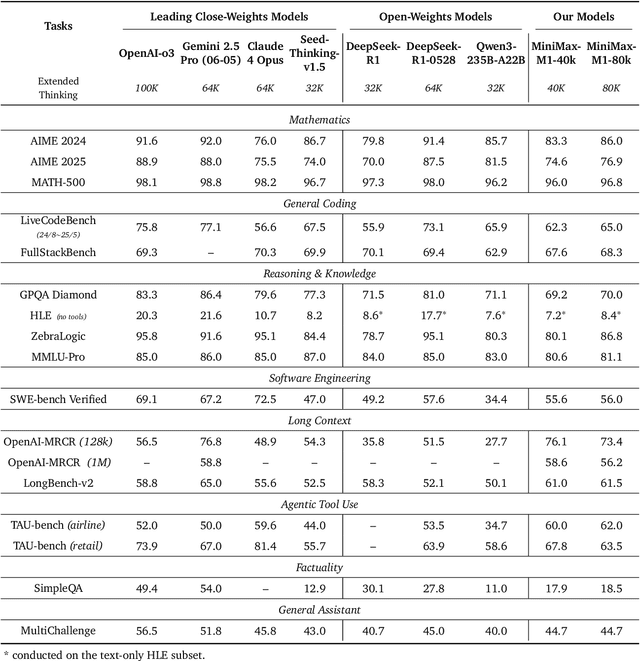
We introduce MiniMax-M1, the world's first open-weight, large-scale hybrid-attention reasoning model. MiniMax-M1 is powered by a hybrid Mixture-of-Experts (MoE) architecture combined with a lightning attention mechanism. The model is developed based on our previous MiniMax-Text-01 model, which contains a total of 456 billion parameters with 45.9 billion parameters activated per token. The M1 model natively supports a context length of 1 million tokens, 8x the context size of DeepSeek R1. Furthermore, the lightning attention mechanism in MiniMax-M1 enables efficient scaling of test-time compute. These properties make M1 particularly suitable for complex tasks that require processing long inputs and thinking extensively. MiniMax-M1 is trained using large-scale reinforcement learning (RL) on diverse problems including sandbox-based, real-world software engineering environments. In addition to M1's inherent efficiency advantage for RL training, we propose CISPO, a novel RL algorithm to further enhance RL efficiency. CISPO clips importance sampling weights rather than token updates, outperforming other competitive RL variants. Combining hybrid-attention and CISPO enables MiniMax-M1's full RL training on 512 H800 GPUs to complete in only three weeks, with a rental cost of just $534,700. We release two versions of MiniMax-M1 models with 40K and 80K thinking budgets respectively, where the 40K model represents an intermediate phase of the 80K training. Experiments on standard benchmarks show that our models are comparable or superior to strong open-weight models such as the original DeepSeek-R1 and Qwen3-235B, with particular strengths in complex software engineering, tool utilization, and long-context tasks. We publicly release MiniMax-M1 at https://github.com/MiniMax-AI/MiniMax-M1.
Collaborative Perception Datasets for Autonomous Driving: A Review
Apr 17, 2025



Collaborative perception has attracted growing interest from academia and industry due to its potential to enhance perception accuracy, safety, and robustness in autonomous driving through multi-agent information fusion. With the advancement of Vehicle-to-Everything (V2X) communication, numerous collaborative perception datasets have emerged, varying in cooperation paradigms, sensor configurations, data sources, and application scenarios. However, the absence of systematic summarization and comparative analysis hinders effective resource utilization and standardization of model evaluation. As the first comprehensive review focused on collaborative perception datasets, this work reviews and compares existing resources from a multi-dimensional perspective. We categorize datasets based on cooperation paradigms, examine their data sources and scenarios, and analyze sensor modalities and supported tasks. A detailed comparative analysis is conducted across multiple dimensions. We also outline key challenges and future directions, including dataset scalability, diversity, domain adaptation, standardization, privacy, and the integration of large language models. To support ongoing research, we provide a continuously updated online repository of collaborative perception datasets and related literature: https://github.com/frankwnb/Collaborative-Perception-Datasets-for-Autonomous-Driving.
MiniMax-01: Scaling Foundation Models with Lightning Attention
Jan 14, 2025We introduce MiniMax-01 series, including MiniMax-Text-01 and MiniMax-VL-01, which are comparable to top-tier models while offering superior capabilities in processing longer contexts. The core lies in lightning attention and its efficient scaling. To maximize computational capacity, we integrate it with Mixture of Experts (MoE), creating a model with 32 experts and 456 billion total parameters, of which 45.9 billion are activated for each token. We develop an optimized parallel strategy and highly efficient computation-communication overlap techniques for MoE and lightning attention. This approach enables us to conduct efficient training and inference on models with hundreds of billions of parameters across contexts spanning millions of tokens. The context window of MiniMax-Text-01 can reach up to 1 million tokens during training and extrapolate to 4 million tokens during inference at an affordable cost. Our vision-language model, MiniMax-VL-01 is built through continued training with 512 billion vision-language tokens. Experiments on both standard and in-house benchmarks show that our models match the performance of state-of-the-art models like GPT-4o and Claude-3.5-Sonnet while offering 20-32 times longer context window. We publicly release MiniMax-01 at https://github.com/MiniMax-AI.