 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffPixelFormer: Differential Pixel-Aware Transformer for RGB-D Indoor Scene Segmentation
Nov 17, 2025Indoor semantic segmentation is fundamental to computer vision and robotics, supporting applications such as autonomous navigation, augmented reality, and smart environments. Although RGB-D fusion leverages complementary appearance and geometric cues, existing methods often depend on computationally intensive cross-attention mechanisms and insufficiently model intra- and inter-modal feature relationships, resulting in imprecise feature alignment and limited discriminative representation. To address these challenges, we propose DiffPixelFormer, a differential pixel-aware Transformer for RGB-D indoor scene segmentation that simultaneously enhances intra-modal representations and models inter-modal interactions. At its core, the Intra-Inter Modal Interaction Block (IIMIB) captures intra-modal long-range dependencies via self-attention and models inter-modal interactions with the Differential-Shared Inter-Modal (DSIM) module to disentangle modality-specific and shared cues, enabling fine-grained, pixel-level cross-modal alignment. Furthermore, a dynamic fusion strategy balances modality contributions and fully exploits RGB-D information according to scene characteristics. Extensive experiments on the SUN RGB-D and NYUDv2 benchmarks demonstrate that DiffPixelFormer-L achieves mIoU scores of 54.28% and 59.95%, outperforming DFormer-L by 1.78% and 2.75%, respectively. Code is available at https://github.com/gongyan1/DiffPixelFormer.
Progressive Bird's Eye View Perception for Safety-Critical Autonomous Driving: A Comprehensive Survey
Aug 11, 2025Bird's-Eye-View (BEV) perception has become a foundational paradigm in autonomous driving, enabling unified spatial representations that support robust multi-sensor fusion and multi-agent collaboration. As autonomous vehicles transition from controlled environments to real-world deployment, ensuring the safety and reliability of BEV perception in complex scenarios - such as occlusions, adverse weather, and dynamic traffic - remains a critical challenge. This survey provides the first comprehensive review of BEV perception from a safety-critical perspective, systematically analyzing state-of-the-art frameworks and implementation strategies across three progressive stages: single-modality vehicle-side, multimodal vehicle-side, and multi-agent collaborative perception. Furthermore, we examine public datasets encompassing vehicle-side, roadside, and collaborative settings, evaluating their relevance to safety and robustness. We also identify key open-world challenges - including open-set recognition, large-scale unlabeled data, sensor degradation, and inter-agent communication latency - and outline future research directions, such as integration with end-to-end autonomous driving systems, embodied intelligence, and large language models.
Collaborative Perception Datasets for Autonomous Driving: A Review
Apr 17, 2025



Collaborative perception has attracted growing interest from academia and industry due to its potential to enhance perception accuracy, safety, and robustness in autonomous driving through multi-agent information fusion. With the advancement of Vehicle-to-Everything (V2X) communication, numerous collaborative perception datasets have emerged, varying in cooperation paradigms, sensor configurations, data sources, and application scenarios. However, the absence of systematic summarization and comparative analysis hinders effective resource utilization and standardization of model evaluation. As the first comprehensive review focused on collaborative perception datasets, this work reviews and compares existing resources from a multi-dimensional perspective. We categorize datasets based on cooperation paradigms, examine their data sources and scenarios, and analyze sensor modalities and supported tasks. A detailed comparative analysis is conducted across multiple dimensions. We also outline key challenges and future directions, including dataset scalability, diversity, domain adaptation, standardization, privacy, and the integration of large language models. To support ongoing research, we provide a continuously updated online repository of collaborative perception datasets and related literature: https://github.com/frankwnb/Collaborative-Perception-Datasets-for-Autonomous-Driving.
Multi-modal Fusion Technology based on Vehicle Information: A Survey
Nov 11, 2022

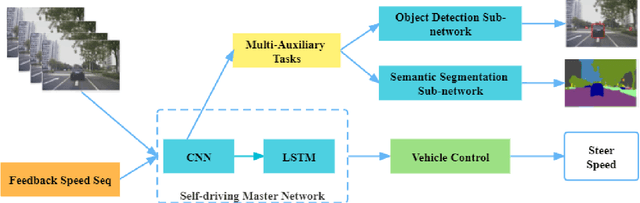

Multi-modal fusion is a basic task of autonomous driving system perception, which has attracted many scholars' interest in recent years. The current multi-modal fusion methods mainly focus on camera data and LiDAR data, but pay little attention to the kinematic information provided by the bottom sensors of the vehicle, such as acceleration, vehicle speed, angle of rotation. These information are not affected by complex external scenes, so it is more robust and reliable. In this paper, we introduce the existing application fields of vehicle bottom information and the research progress of related methods, as well as the multi-modal fusion methods based on bottom information. We also introduced the relevant information of the vehicle bottom information data set in detail to facilitate the research as soon as possible. In addition, new future ideas of multi-modal fusion technology for autonomous driving tasks are proposed to promote the further utilization of vehicle bottom information.