 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning One-Class Hyperspectral Classifier from Positive and Unlabeled Data for Low Proportion Target
Oct 27, 2022



Hyperspectral imagery (HSI) one-class classification is aimed at identifying a single target class from the HSI by using only positive labels, which can significantly reduce the requirements for annotation. However, HSI one-class classification is far more challenging than HSI multi-class classification, due the lack of negative labels and the low target proportion, which are issues that have rarely been considered in the previous HSI classification studies. In this paper, a weakly supervised HSI one-class classifier, namely HOneCls is proposed to solve the problem of under-fitting of the positive class occurs in the HSI data with low target proportion, where a risk estimator -- the One-Class Risk Estimator -- is particularly introduced to make the full convolutional neural network (FCN) with the ability of one class classification. The experimental results obtained on challenging hyperspectral classification datasets, which includes 20 kinds of ground objects with very similar spectra, demonstrate the efficiency and feasibility of the proposed One-Class Risk Estimator. Compared with the state-of-the-art one-class classifiers, the F1-score is improved significantly in the HSI data with low target proportion.
Driving Tasks Transfer in Deep Reinforcement Learning for Decision-making of Autonomous Vehicles
Oct 10, 2020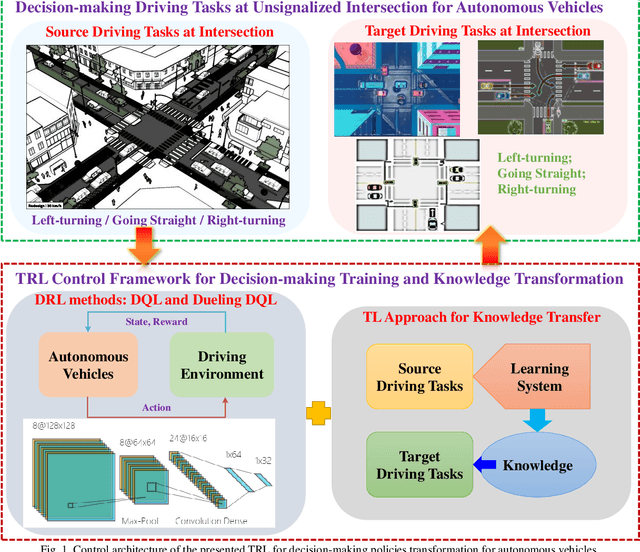
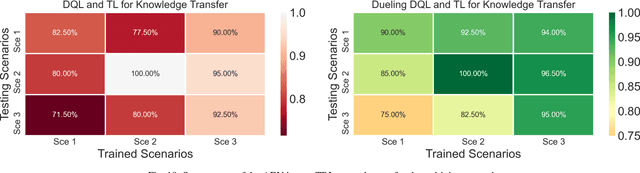
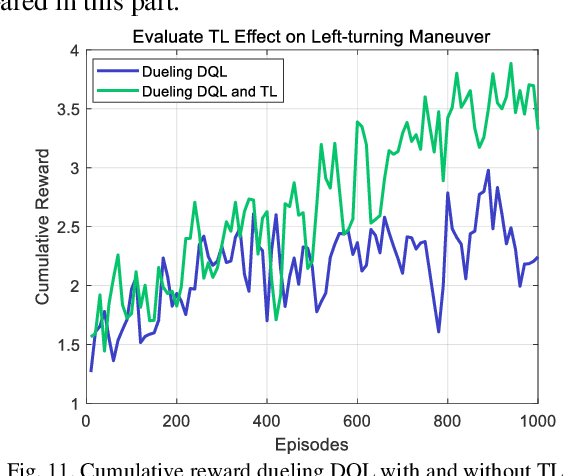
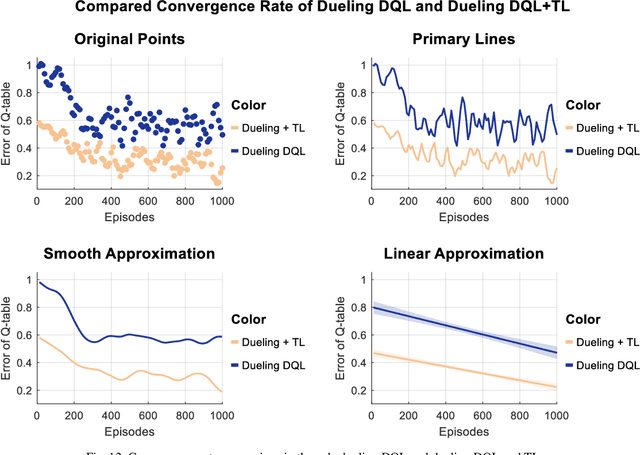
Knowledge transfer is a promising concept to achieve real-time decision-making for autonomous vehicles. This paper constructs a transfer deep reinforcement learning framework to transform the driving tasks in inter-section environments. The driving missions at the un-signalized intersection are cast into a left turn, right turn, and running straight for automated vehicles. The goal of the autonomous ego vehicle (AEV) is to drive through the intersection situation efficiently and safely. This objective promotes the studied vehicle to increase its speed and avoid crashing other vehicles. The decision-making pol-icy learned from one driving task is transferred and evaluated in another driving mission. Simulation results reveal that the decision-making strategies related to similar tasks are transferable. It indicates that the presented control framework could reduce the time consumption and realize online implementation.