 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Footprints: A Safety-guaranteed Collision Avoidance Model for Numerical Optimization-based Trajectory Planning
Feb 15, 2023Numerical optimization-based methods are among the prevalent trajectory planners for autonomous driving. In a numerical optimization-based planner, the nominal continuous-time trajectory planning problem is discretized into a nonlinear program (NLP) problem with finite constraints imposed on finite collocation points. However, constraint violations between adjacent collocation points may still occur. This study proposes a safety-guaranteed collision-avoidance modeling method to eliminate the collision risks between adjacent collocation points in using numerical optimization-based trajectory planners. A new concept called embodied box is proposed, which is formed by enlarging the rectangular footprint of the ego vehicle. If one can ensure that the embodied boxes at finite collocation points are collide-free, then the ego vehicle's footprint is collide-free at any a moment between adjacent collocation points. We find that the geometric size of an embodied box is a simple function of vehicle velocity and curvature. The proposed theory lays a foundation for numerical optimization-based trajectory planners in autonomous driving.
Attention-based Supply-Demand Prediction for Autonomous Vehicles
May 27, 2019
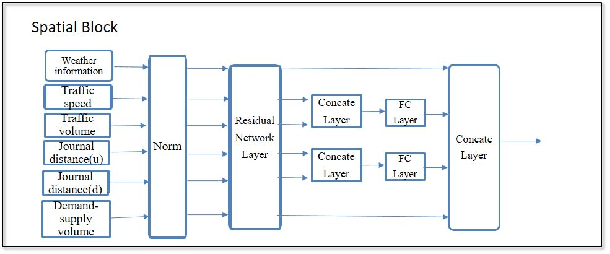
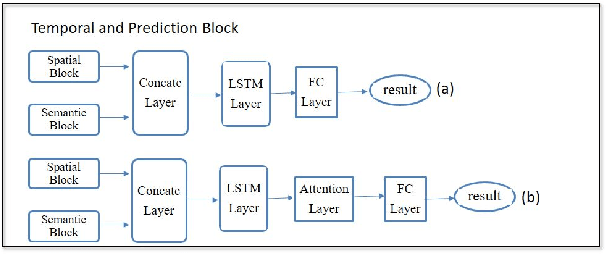
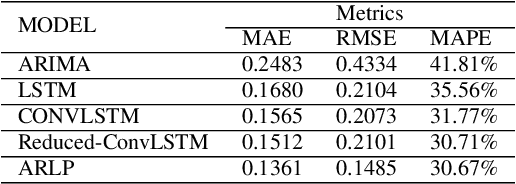
As one of the important functions of the intelligent transportation system (ITS), supply-demand prediction for autonomous vehicles provides a decision basis for its control. In this paper, we present two prediction models (i.e. ARLP model and Advanced ARLP model) based on two system environments that only the current day's historical data is available or several days' historical data are available. These two models jointly consider the spatial, temporal, and semantic relations. Spatial dependency is captured with residual network and dimension reduction. Short term temporal dependency is captured with LSTM. Long term temporal dependency and temporal shifting are captured with LSTM and attention mechanism. Semantic dependency is captured with multi-attention mechanism and autocorrelation coefficient method. Extensive experiments show that our frameworks provide more accurate and stable prediction results than the existing methods.