 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention-based Supply-Demand Prediction for Autonomous Vehicles
May 27, 2019
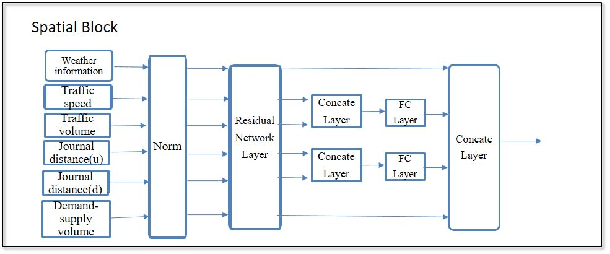
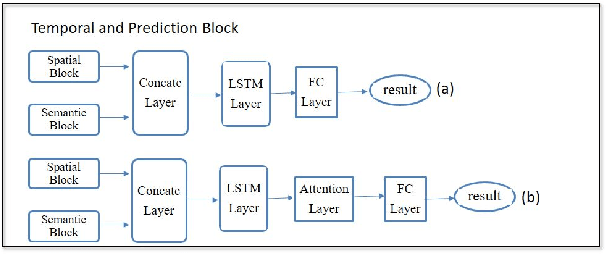
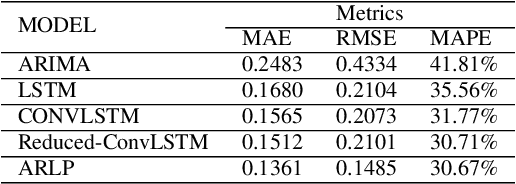
As one of the important functions of the intelligent transportation system (ITS), supply-demand prediction for autonomous vehicles provides a decision basis for its control. In this paper, we present two prediction models (i.e. ARLP model and Advanced ARLP model) based on two system environments that only the current day's historical data is available or several days' historical data are available. These two models jointly consider the spatial, temporal, and semantic relations. Spatial dependency is captured with residual network and dimension reduction. Short term temporal dependency is captured with LSTM. Long term temporal dependency and temporal shifting are captured with LSTM and attention mechanism. Semantic dependency is captured with multi-attention mechanism and autocorrelation coefficient method. Extensive experiments show that our frameworks provide more accurate and stable prediction results than the existing methods.