 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-making at Unsignalized Intersection for Autonomous Vehicles: Left-turn Maneuver with Deep Reinforcement Learning
Aug 14, 2020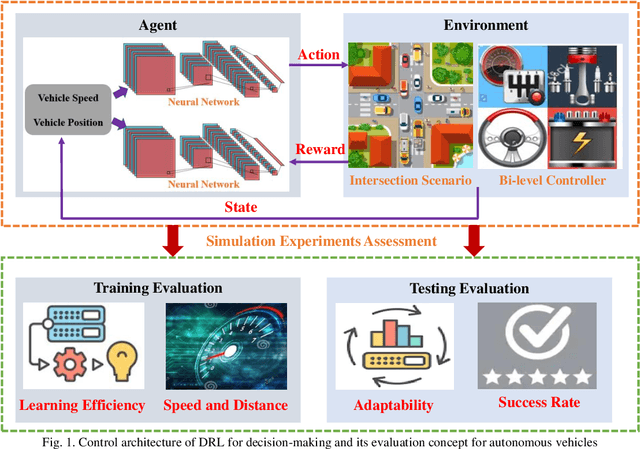
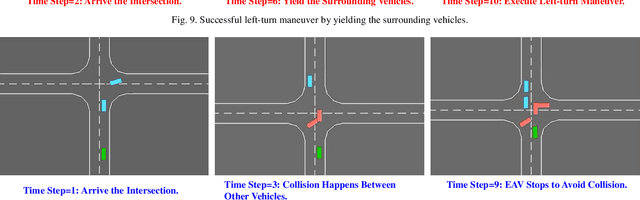
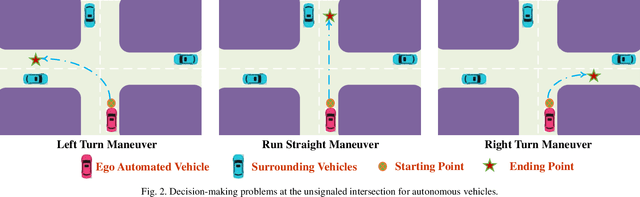
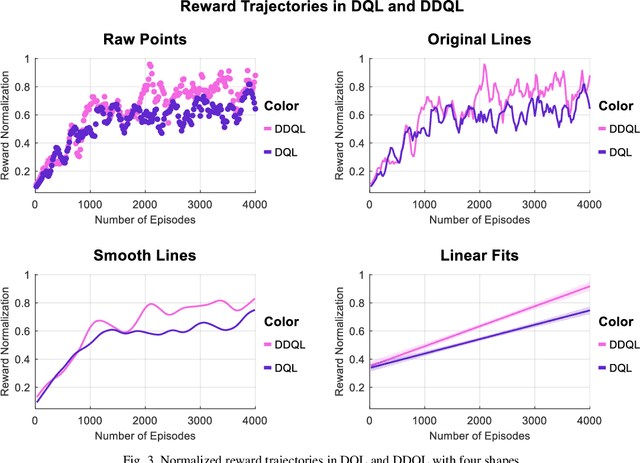
Decision-making module enables autonomous vehicles to reach appropriate maneuvers in the complex urban environments, especially the intersection situations. This work proposes a deep reinforcement learning (DRL) based left-turn decision-making framework at unsignalized intersection for autonomous vehicles. The objective of the studied automated vehicle is to make an efficient and safe left-turn maneuver at a four-way unsignalized intersection. The exploited DRL methods include deep Q-learning (DQL) and double DQL. Simulation results indicate that the presented decision-making strategy could efficaciously reduce the collision rate and improve transport efficiency. This work also reveals that the constructed left-turn control structure has a great potential to be applied in real-time.
A Comparative Analysis of Deep Reinforcement Learning-enabled Freeway Decision-making for Automated Vehicles
Aug 04, 2020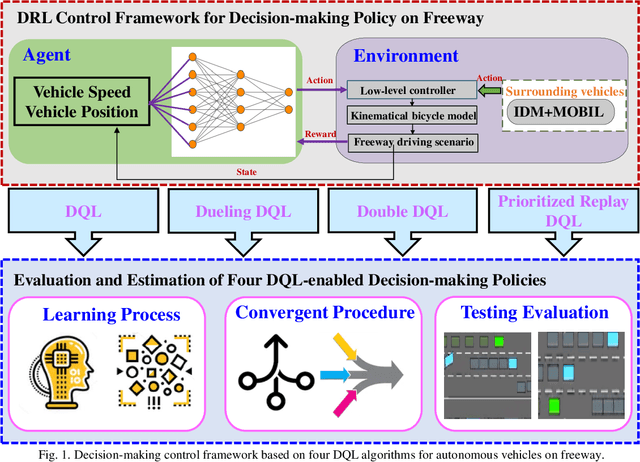
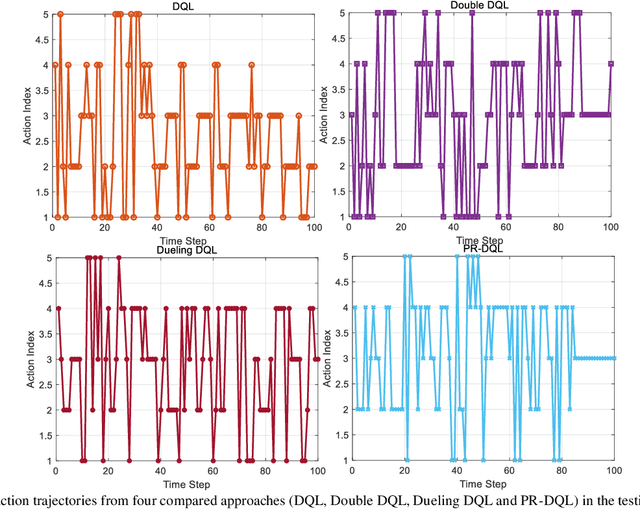
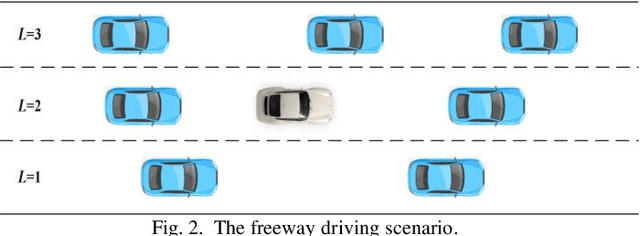
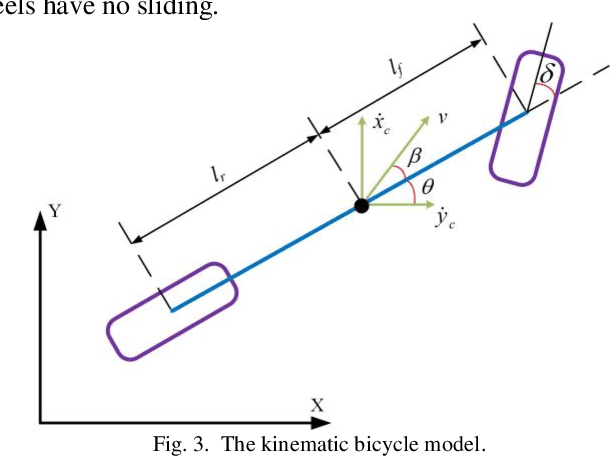
Deep reinforcement learning (DRL) is becoming a prevalent and powerful methodology to address the artificial intelligent problems. Owing to its tremendous potentials in self-learning and self-improvement, DRL is broadly serviced in many research fields. This article conducted a comprehensive comparison of multiple DRL approaches on the freeway decision-making problem for autonomous vehicles. These techniques include the common deep Q learning (DQL), double DQL (DDQL), dueling DQL, and prioritized replay DQL. First, the reinforcement learning (RL) framework is introduced. As an extension, the implementations of the above mentioned DRL methods are established mathematically. Then, the freeway driving scenario for the automated vehicles is constructed, wherein the decision-making problem is transferred as a control optimization problem. Finally, a series of simulation experiments are achieved to evaluate the control performance of these DRL-enabled decision-making strategies. A comparative analysis is realized to connect the autonomous driving results with the learning characteristics of these DRL techniques.