 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-making for Autonomous Vehicles on Highway: Deep Reinforcement Learning with Continuous Action Horizon
Paper and Code
Aug 26, 2020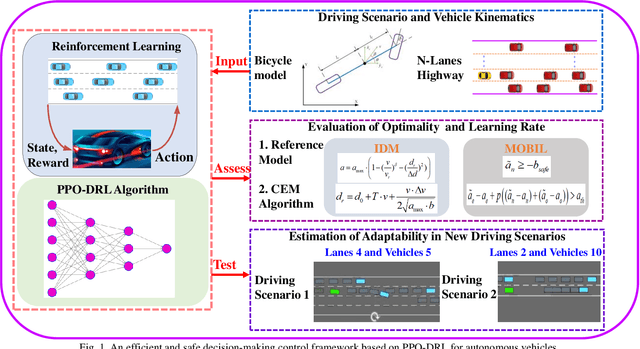
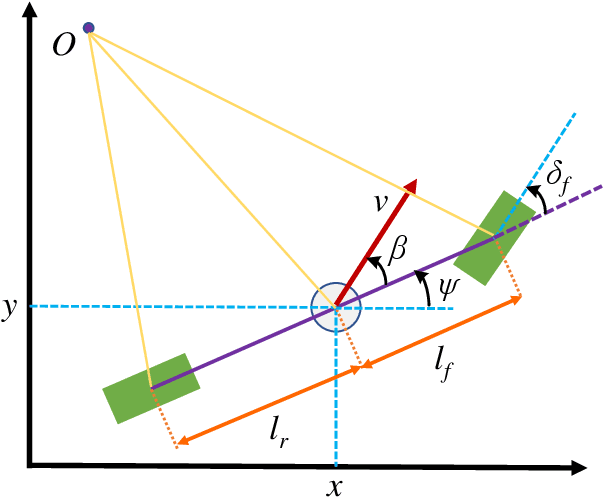
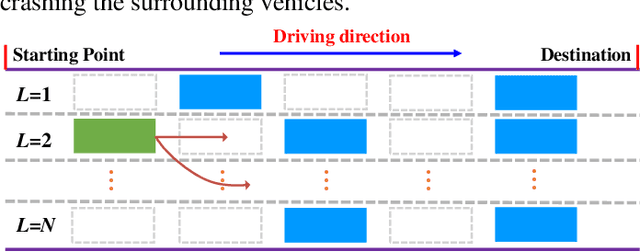
Decision-making strategy for autonomous vehicles de-scribes a sequence of driving maneuvers to achieve a certain navigational mission. This paper utilizes the deep reinforcement learning (DRL) method to address the continuous-horizon decision-making problem on the highway. First, the vehicle kinematics and driving scenario on the freeway are introduced. The running objective of the ego automated vehicle is to execute an efficient and smooth policy without collision. Then, the particular algorithm named proximal policy optimization (PPO)-enhanced DRL is illustrated. To overcome the challenges in tardy training efficiency and sample inefficiency, this applied algorithm could realize high learning efficiency and excellent control performance. Finally, the PPO-DRL-based decision-making strategy is estimated from multiple perspectives, including the optimality, learning efficiency, and adaptability. Its potential for online application is discussed by applying it to similar driving scenarios.