 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhi-4-Mini-Reasoning: Exploring the Limits of Small Reasoning Language Models in Math
Apr 30, 2025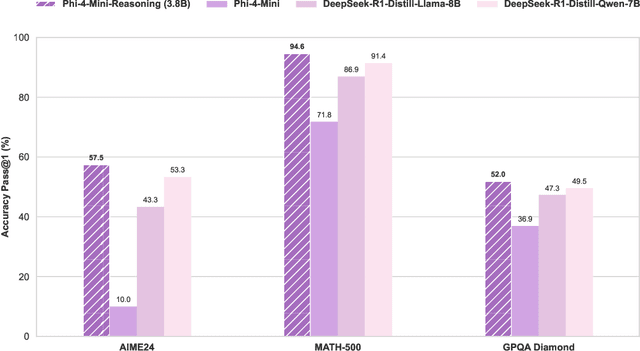
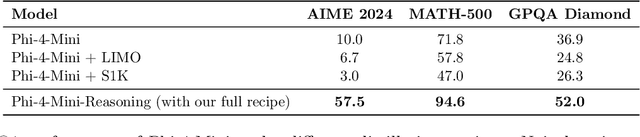

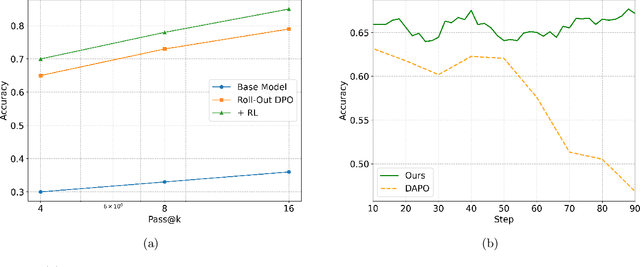
Chain-of-Thought (CoT) significantly enhances formal reasoning capabilities in Large Language Models (LLMs) by training them to explicitly generate intermediate reasoning steps. While LLMs readily benefit from such techniques, improving reasoning in Small Language Models (SLMs) remains challenging due to their limited model capacity. Recent work by Deepseek-R1 demonstrates that distillation from LLM-generated synthetic data can substantially improve the reasoning ability of SLM. However, the detailed modeling recipe is not disclosed. In this work, we present a systematic training recipe for SLMs that consists of four steps: (1) large-scale mid-training on diverse distilled long-CoT data, (2) supervised fine-tuning on high-quality long-CoT data, (3) Rollout DPO leveraging a carefully curated preference dataset, and (4) Reinforcement Learning (RL) with Verifiable Reward. We apply our method on Phi-4-Mini, a compact 3.8B-parameter model. The resulting Phi-4-Mini-Reasoning model exceeds, on math reasoning tasks, much larger reasoning models, e.g., outperforming DeepSeek-R1-Distill-Qwen-7B by 3.2 points and DeepSeek-R1-Distill-Llama-8B by 7.7 points on Math-500. Our results validate that a carefully designed training recipe, with large-scale high-quality CoT data, is effective to unlock strong reasoning capabilities even in resource-constrained small models.
Phi-4-Mini Technical Report: Compact yet Powerful Multimodal Language Models via Mixture-of-LoRAs
Mar 03, 2025



We introduce Phi-4-Mini and Phi-4-Multimodal, compact yet highly capable language and multimodal models. Phi-4-Mini is a 3.8-billion-parameter language model trained on high-quality web and synthetic data, significantly outperforming recent open-source models of similar size and matching the performance of models twice its size on math and coding tasks requiring complex reasoning. This achievement is driven by a carefully curated synthetic data recipe emphasizing high-quality math and coding datasets. Compared to its predecessor, Phi-3.5-Mini, Phi-4-Mini features an expanded vocabulary size of 200K tokens to better support multilingual applications, as well as group query attention for more efficient long-sequence generation. Phi-4-Multimodal is a multimodal model that integrates text, vision, and speech/audio input modalities into a single model. Its novel modality extension approach leverages LoRA adapters and modality-specific routers to allow multiple inference modes combining various modalities without interference. For example, it now ranks first in the OpenASR leaderboard to date, although the LoRA component of the speech/audio modality has just 460 million parameters. Phi-4-Multimodal supports scenarios involving (vision + language), (vision + speech), and (speech/audio) inputs, outperforming larger vision-language and speech-language models on a wide range of tasks. Additionally, we experiment to further train Phi-4-Mini to enhance its reasoning capabilities. Despite its compact 3.8-billion-parameter size, this experimental version achieves reasoning performance on par with or surpassing significantly larger models, including DeepSeek-R1-Distill-Qwen-7B and DeepSeek-R1-Distill-Llama-8B.
On Pre-training of Multimodal Language Models Customized for Chart Understanding
Jul 19, 2024

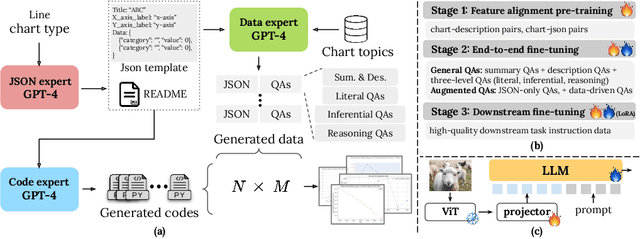

Recent studies customizing Multimodal Large Language Models (MLLMs) for domain-specific tasks have yielded promising results, especially in the field of scientific chart comprehension. These studies generally utilize visual instruction tuning with specialized datasets to enhance question and answer (QA) accuracy within the chart domain. However, they often neglect the fundamental discrepancy between natural image-caption pre-training data and digital chart image-QA data, particularly in the models' capacity to extract underlying numeric values from charts. This paper tackles this oversight by exploring the training processes necessary to improve MLLMs' comprehension of charts. We present three key findings: (1) Incorporating raw data values in alignment pre-training markedly improves comprehension of chart data. (2) Replacing images with their textual representation randomly during end-to-end fine-tuning transfer the language reasoning capability to chart interpretation skills. (3) Requiring the model to first extract the underlying chart data and then answer the question in the fine-tuning can further improve the accuracy. Consequently, we introduce CHOPINLLM, an MLLM tailored for in-depth chart comprehension. CHOPINLLM effectively interprets various types of charts, including unannotated ones, while maintaining robust reasoning abilities. Furthermore, we establish a new benchmark to evaluate MLLMs' understanding of different chart types across various comprehension levels. Experimental results show that CHOPINLLM exhibits strong performance in understanding both annotated and unannotated charts across a wide range of types.
ReXTime: A Benchmark Suite for Reasoning-Across-Time in Videos
Jun 27, 2024We introduce ReXTime, a benchmark designed to rigorously test AI models' ability to perform temporal reasoning within video events. Specifically, ReXTime focuses on reasoning across time, i.e. human-like understanding when the question and its corresponding answer occur in different video segments. This form of reasoning, requiring advanced understanding of cause-and-effect relationships across video segments, poses significant challenges to even the frontier multimodal large language models. To facilitate this evaluation, we develop an automated pipeline for generating temporal reasoning question-answer pairs, significantly reducing the need for labor-intensive manual annotations. Our benchmark includes 921 carefully vetted validation samples and 2,143 test samples, each manually curated for accuracy and relevance. Evaluation results show that while frontier large language models outperform academic models, they still lag behind human performance by a significant 14.3% accuracy gap. Additionally, our pipeline creates a training dataset of 9,695 machine generated samples without manual effort, which empirical studies suggest can enhance the across-time reasoning via fine-tuning.
Synthesizing Programmatic Reinforcement Learning Policies with Large Language Model Guided Search
May 26, 2024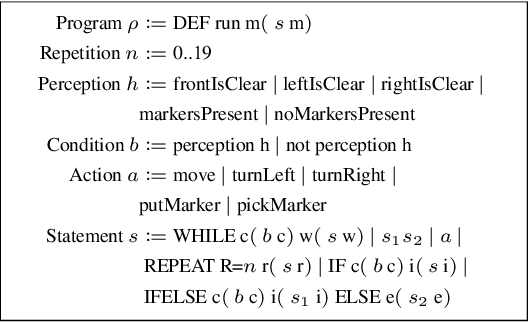
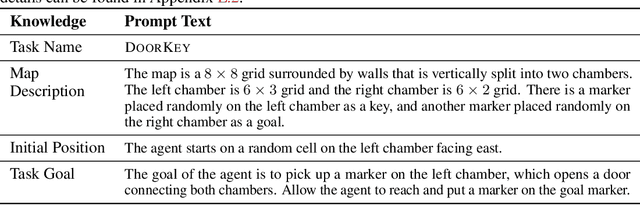
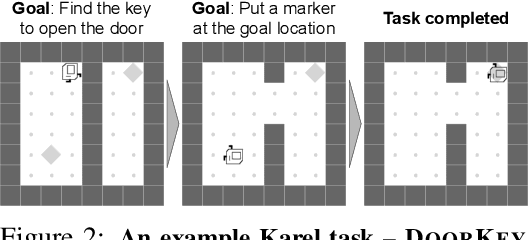
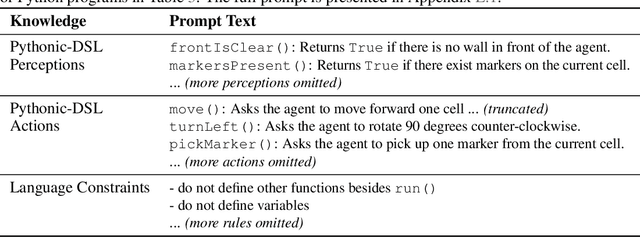
Programmatic reinforcement learning (PRL) has been explored for representing policies through programs as a means to achieve interpretability and generalization. Despite promising outcomes, current state-of-the-art PRL methods are hindered by sample inefficiency, necessitating tens of millions of program-environment interactions. To tackle this challenge, we introduce a novel LLM-guided search framework (LLM-GS). Our key insight is to leverage the programming expertise and common sense reasoning of LLMs to enhance the efficiency of assumption-free, random-guessing search methods. We address the challenge of LLMs' inability to generate precise and grammatically correct programs in domain-specific languages (DSLs) by proposing a Pythonic-DSL strategy - an LLM is instructed to initially generate Python codes and then convert them into DSL programs. To further optimize the LLM-generated programs, we develop a search algorithm named Scheduled Hill Climbing, designed to efficiently explore the programmatic search space to consistently improve the programs. Experimental results in the Karel domain demonstrate the superior effectiveness and efficiency of our LLM-GS framework. Extensive ablation studies further verify the critical role of our Pythonic-DSL strategy and Scheduled Hill Climbing algorithm.
iFusion: Inverting Diffusion for Pose-Free Reconstruction from Sparse Views
Dec 28, 2023We present iFusion, a novel 3D object reconstruction framework that requires only two views with unknown camera poses. While single-view reconstruction yields visually appealing results, it can deviate significantly from the actual object, especially on unseen sides. Additional views improve reconstruction fidelity but necessitate known camera poses. However, assuming the availability of pose may be unrealistic, and existing pose estimators fail in sparse view scenarios. To address this, we harness a pre-trained novel view synthesis diffusion model, which embeds implicit knowledge about the geometry and appearance of diverse objects. Our strategy unfolds in three steps: (1) We invert the diffusion model for camera pose estimation instead of synthesizing novel views. (2) The diffusion model is fine-tuned using provided views and estimated poses, turned into a novel view synthesizer tailored for the target object. (3) Leveraging registered views and the fine-tuned diffusion model, we reconstruct the 3D object. Experiments demonstrate strong performance in both pose estimation and novel view synthesis. Moreover, iFusion seamlessly integrates with various reconstruction methods and enhances them.
LACMA: Language-Aligning Contrastive Learning with Meta-Actions for Embodied Instruction Following
Oct 18, 2023

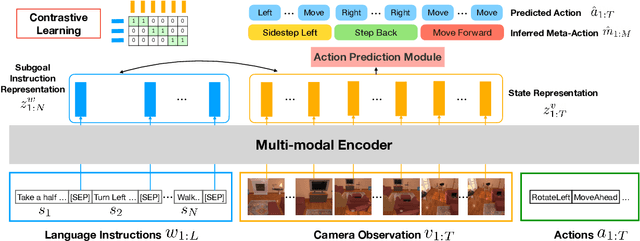

End-to-end Transformers have demonstrated an impressive success rate for Embodied Instruction Following when the environment has been seen in training. However, they tend to struggle when deployed in an unseen environment. This lack of generalizability is due to the agent's insensitivity to subtle changes in natural language instructions. To mitigate this issue, we propose explicitly aligning the agent's hidden states with the instructions via contrastive learning. Nevertheless, the semantic gap between high-level language instructions and the agent's low-level action space remains an obstacle. Therefore, we further introduce a novel concept of meta-actions to bridge the gap. Meta-actions are ubiquitous action patterns that can be parsed from the original action sequence. These patterns represent higher-level semantics that are intuitively aligned closer to the instructions. When meta-actions are applied as additional training signals, the agent generalizes better to unseen environments. Compared to a strong multi-modal Transformer baseline, we achieve a significant 4.5% absolute gain in success rate in unseen environments of ALFRED Embodied Instruction Following. Additional analysis shows that the contrastive objective and meta-actions are complementary in achieving the best results, and the resulting agent better aligns its states with corresponding instructions, making it more suitable for real-world embodied agents. The code is available at: https://github.com/joeyy5588/LACMA.
Uni-ControlNet: All-in-One Control to Text-to-Image Diffusion Models
May 31, 2023Text-to-Image diffusion models have made tremendous progress over the past two years, enabling the generation of highly realistic images based on open-domain text descriptions. However, despite their success, text descriptions often struggle to adequately convey detailed controls, even when composed of long and complex texts. Moreover, recent studies have also shown that these models face challenges in understanding such complex texts and generating the corresponding images. Therefore, there is a growing need to enable more control modes beyond text description. In this paper, we introduce Uni-ControlNet, a novel approach that allows for the simultaneous utilization of different local controls (e.g., edge maps, depth map, segmentation masks) and global controls (e.g., CLIP image embeddings) in a flexible and composable manner within one model. Unlike existing methods, Uni-ControlNet only requires the fine-tuning of two additional adapters upon frozen pre-trained text-to-image diffusion models, eliminating the huge cost of training from scratch. Moreover, thanks to some dedicated adapter designs, Uni-ControlNet only necessitates a constant number (i.e., 2) of adapters, regardless of the number of local or global controls used. This not only reduces the fine-tuning costs and model size, making it more suitable for real-world deployment, but also facilitate composability of different conditions. Through both quantitative and qualitative comparisons, Uni-ControlNet demonstrates its superiority over existing methods in terms of controllability, generation quality and composability. Code is available at \url{https://github.com/ShihaoZhaoZSH/Uni-ControlNet}.
Modality-Independent Teachers Meet Weakly-Supervised Audio-Visual Event Parser
May 27, 2023



Audio-visual learning has been a major pillar of multi-modal machine learning, where the community mostly focused on its modality-aligned setting, i.e., the audio and visual modality are both assumed to signal the prediction target. With the Look, Listen, and Parse dataset (LLP), we investigate the under-explored unaligned setting, where the goal is to recognize audio and visual events in a video with only weak labels observed. Such weak video-level labels only tell what events happen without knowing the modality they are perceived (audio, visual, or both). To enhance learning in this challenging setting, we incorporate large-scale contrastively pre-trained models as the modality teachers. A simple, effective, and generic method, termed Visual-Audio Label Elaboration (VALOR), is innovated to harvest modality labels for the training events. Empirical studies show that the harvested labels significantly improve an attentional baseline by 8.0 in average F-score (Type@AV). Surprisingly, we found that modality-independent teachers outperform their modality-fused counterparts since they are noise-proof from the other potentially unaligned modality. Moreover, our best model achieves the new state-of-the-art on all metrics of LLP by a substantial margin (+5.4 F-score for Type@AV). VALOR is further generalized to Audio-Visual Event Localization and achieves the new state-of-the-art as well. Code is available at: https://github.com/Franklin905/VALOR.
Frido: Feature Pyramid Diffusion for Complex Scene Image Synthesis
Aug 29, 2022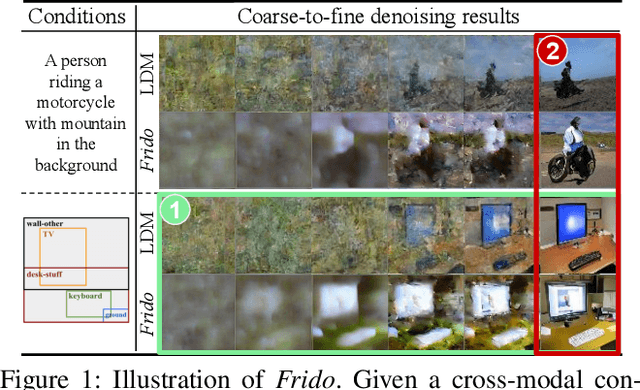

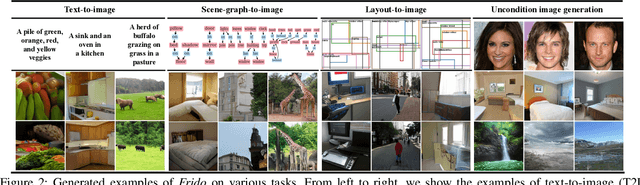
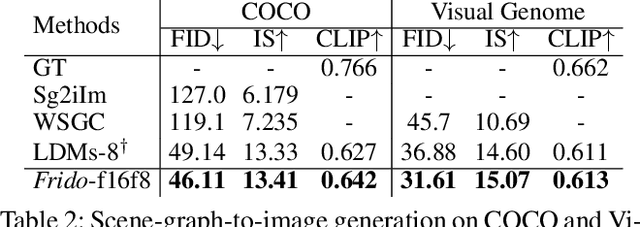
Diffusion models (DMs) have shown great potential for high-quality image synthesis. However, when it comes to producing images with complex scenes, how to properly describe both image global structures and object details remains a challenging task. In this paper, we present Frido, a Feature Pyramid Diffusion model performing a multi-scale coarse-to-fine denoising process for image synthesis. Our model decomposes an input image into scale-dependent vector quantized features, followed by a coarse-to-fine gating for producing image output. During the above multi-scale representation learning stage, additional input conditions like text, scene graph, or image layout can be further exploited. Thus, Frido can be also applied for conditional or cross-modality image synthesis. We conduct extensive experiments over various unconditioned and conditional image generation tasks, ranging from text-to-image synthesis, layout-to-image, scene-graph-to-image, to label-to-image. More specifically, we achieved state-of-the-art FID scores on five benchmarks, namely layout-to-image on COCO and OpenImages, scene-graph-to-image on COCO and Visual Genome, and label-to-image on COCO. Code is available at https://github.com/davidhalladay/Frido.