 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolytope Volume Monitoring Problem: Formulation and Solution via Parametric Linear Program Based Control Barrier Function
Mar 16, 2025Motivated by the latest research on feasible space monitoring of multiple control barrier functions (CBFs) as well as polytopic collision avoidance, this paper studies the Polytope Volume Monitoring (PVM) problem, whose goal is to design a control law for inputs of nonlinear systems to prevent the volume of some state-dependent polytope from decreasing to zero. Recent studies have explored the idea of applying Chebyshev ball method in optimization theory to solve the case study of PVM; however, the underlying difficulties caused by nonsmoothness have not been addressed. This paper continues the study on this topic, where our main contribution is to establish the relationship between nonsmooth CBF and parametric optimization theory through directional derivatives for the first time, so as to solve PVM problems more conveniently. In detail, inspired by Chebyshev ball approach, a parametric linear program (PLP) based nonsmooth barrier function candidate is established for PVM, and then, sufficient conditions for it to be a nonsmooth CBF are proposed, based on which a quadratic program (QP) based safety filter with guaranteed feasibility is proposed to address PVM problems. Finally, a numerical simulation example is given to show the efficiency of the proposed safety filter.
Intrinsic Cramér-Rao Bound based 6D Localization and Tracking for 5G/6G Systems
Feb 19, 2025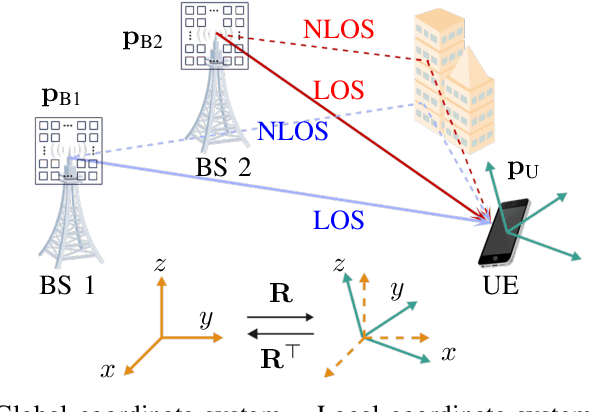
Localization and tracking are critical components of integrated sensing and communication (ISAC) systems, enhancing resource management, beamforming accuracy, and overall system reliability through precise sensing. Due to the high path loss of the high-frequency systems, antenna arrays are required at the transmitter and receiver sides for beamforming gain. However, beam misalignment may occur, which requires accurate tracking of the six-dimensional (6D) state, namely, 3D position and 3D orientation. In this work, we first address the challenge that the rotation matrix, being part of the Lie group rather than Euclidean space, necessitates the derivation of the ICRB for an intrinsic performance benchmark. Then, leveraging the derived ICRB, we develop two filters-one utilizing pose fusion and the other employing error-state Kalman filter to estimate the UE's 6D state for different computational resource consumption and accuracy requirements. Simulation results validate the ICRB and assess the performance of the proposed filters, demonstrating their effectiveness and improved accuracy in 6D state tracking.
Learning Resilient Formation Control of Drones with Graph Attention Network
Sep 03, 2024The rapid advancement of drone technology has significantly impacted various sectors, including search and rescue, environmental surveillance, and industrial inspection. Multidrone systems offer notable advantages such as enhanced efficiency, scalability, and redundancy over single-drone operations. Despite these benefits, ensuring resilient formation control in dynamic and adversarial environments, such as under communication loss or cyberattacks, remains a significant challenge. Classical approaches to resilient formation control, while effective in certain scenarios, often struggle with complex modeling and the curse of dimensionality, particularly as the number of agents increases. This paper proposes a novel, learning-based formation control for enhancing the adaptability and resilience of multidrone formations using graph attention networks (GATs). By leveraging GAT's dynamic capabilities to extract internode relationships based on the attention mechanism, this GAT-based formation controller significantly improves the robustness of drone formations against various threats, such as Denial of Service (DoS) attacks. Our approach not only improves formation performance in normal conditions but also ensures the resilience of multidrone systems in variable and adversarial environments. Extensive simulation results demonstrate the superior performance of our method over baseline formation controllers. Furthermore, the physical experiments validate the effectiveness of the trained control policy in real-world flights.
3-D Distributed Localization with Mixed Local Relative Measurements
Dec 18, 2023This paper studies 3-D distributed network localization using mixed types of local relative measurements. Each node holds a local coordinate frame without a common orientation and can only measure one type of information (relative position, distance, relative bearing, angle, or ratio-of-distance measurements) about its neighboring nodes in its local coordinate frame. A novel rigidity-theory-based distributed localization is developed to overcome the challenge due to the absence of a global coordinate frame. The main idea is to construct displacement constraints for the positions of the nodes by using mixed local relative measurements. Then, a linear distributed localization algorithm is proposed for each free node to estimate its position by solving the displacement constraints. The algebraic condition and graph condition are obtained to guarantee the global convergence of the proposed distributed localization algorithm.
MCFNet: Multi-scale Covariance Feature Fusion Network for Real-time Semantic Segmentation
Dec 12, 2023



The low-level spatial detail information and high-level semantic abstract information are both essential to the semantic segmentation task. The features extracted by the deep network can obtain rich semantic information, while a lot of spatial information is lost. However, how to recover spatial detail information effectively and fuse it with high-level semantics has not been well addressed so far. In this paper, we propose a new architecture based on Bilateral Segmentation Network (BiseNet) called Multi-scale Covariance Feature Fusion Network (MCFNet). Specifically, this network introduces a new feature refinement module and a new feature fusion module. Furthermore, a gating unit named L-Gate is proposed to filter out invalid information and fuse multi-scale features. We evaluate our proposed model on Cityscapes, CamVid datasets and compare it with the state-of-the-art methods. Extensive experiments show that our method achieves competitive success. On Cityscapes, we achieve 75.5% mIOU with a speed of 151.3 FPS.
PyPose v0.6: The Imperative Programming Interface for Robotics
Sep 22, 2023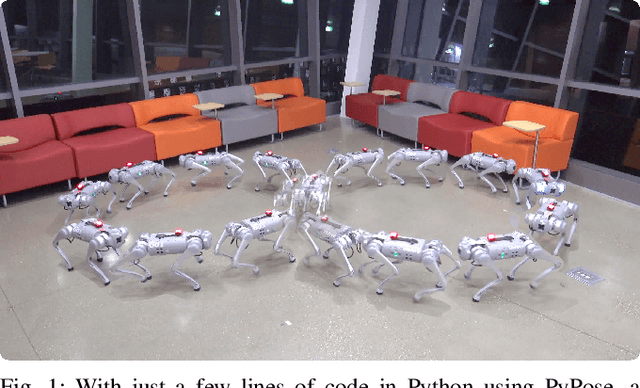
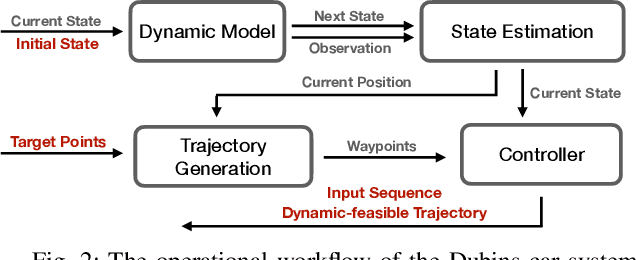
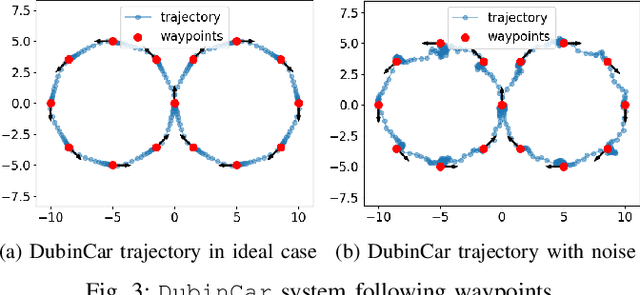
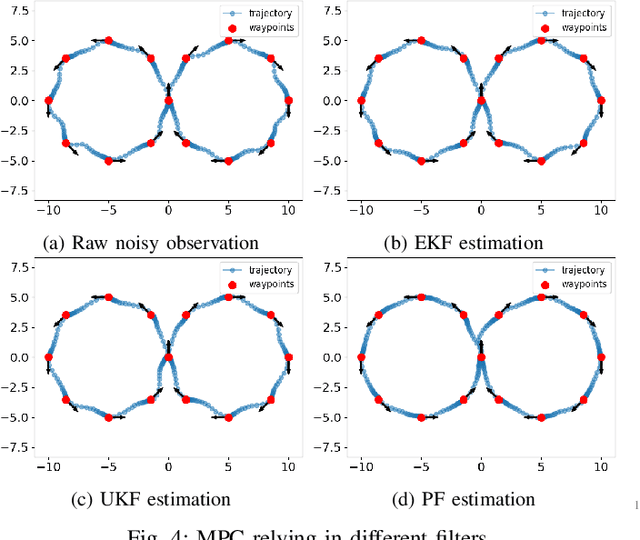
PyPose is an open-source library for robot learning. It combines a learning-based approach with physics-based optimization, which enables seamless end-to-end robot learning. It has been used in many tasks due to its meticulously designed application programming interface (API) and efficient implementation. From its initial launch in early 2022, PyPose has experienced significant enhancements, incorporating a wide variety of new features into its platform. To satisfy the growing demand for understanding and utilizing the library and reduce the learning curve of new users, we present the fundamental design principle of the imperative programming interface, and showcase the flexible usage of diverse functionalities and modules using an extremely simple Dubins car example. We also demonstrate that the PyPose can be easily used to navigate a real quadruped robot with a few lines of code.
A deep local attention network for pre-operative lymph node metastasis prediction in pancreatic cancer via multiphase CT imaging
Jan 04, 2023



Lymph node (LN) metastasis status is one of the most critical prognostic and cancer staging factors for patients with resectable pancreatic ductal adenocarcinoma (PDAC), or in general, for any types of solid malignant tumors. Preoperative prediction of LN metastasis from non-invasive CT imaging is highly desired, as it might be straightforwardly used to guide the following neoadjuvant treatment decision and surgical planning. Most studies only capture the tumor characteristics in CT imaging to implicitly infer LN metastasis and very few work exploit direct LN's CT imaging information. To the best of our knowledge, this is the first work to propose a fully-automated LN segmentation and identification network to directly facilitate the LN metastasis status prediction task. Nevertheless LN segmentation/detection is very challenging since LN can be easily confused with other hard negative anatomic structures (e.g., vessels) from radiological images. We explore the anatomical spatial context priors of pancreatic LN locations by generating a guiding attention map from related organs and vessels to assist segmentation and infer LN status. As such, LN segmentation is impelled to focus on regions that are anatomically adjacent or plausible with respect to the specific organs and vessels. The metastasized LN identification network is trained to classify the segmented LN instances into positives or negatives by reusing the segmentation network as a pre-trained backbone and padding a new classification head. More importantly, we develop a LN metastasis status prediction network that combines the patient-wise aggregation results of LN segmentation/identification and deep imaging features extracted from the tumor region. Extensive quantitative nested five-fold cross-validation is conducted on a discovery dataset of 749 patients with PDAC.
Graph Optimization Approach to Localization with Range Measurements
Sep 19, 2018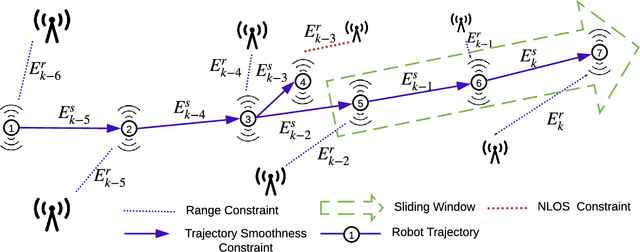
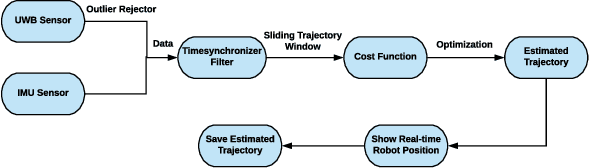
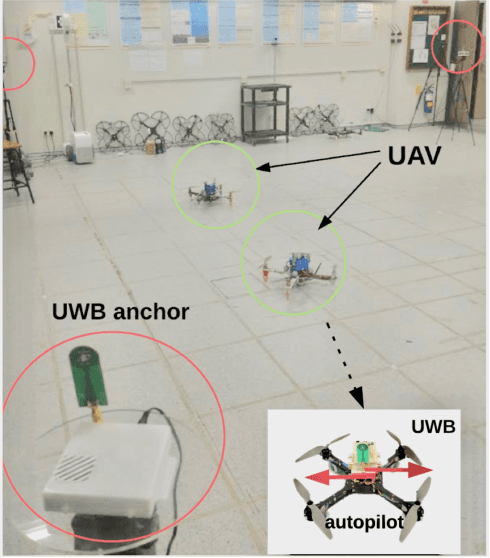
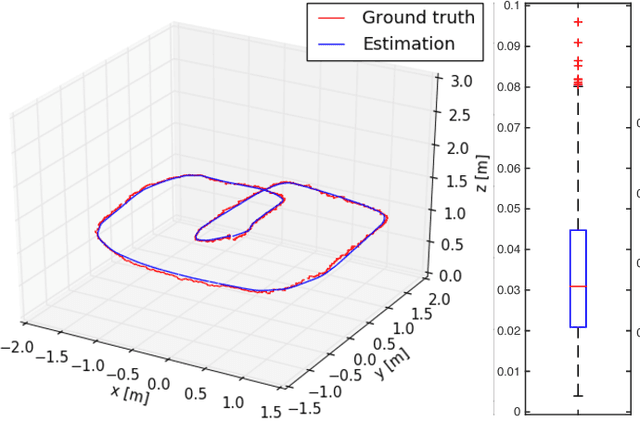
A range-based localization system is proposed based on graph optimization with ultra-wideband (UWB) measurements. There are still multiple issues for existing algorithms to be applied directly in real-time low power systems, especially for micro drones. For instance, the accuracy of triangularization is relatively low since it neglects the time differences of measured distances for position calculation. The filtering methods such as extended Kalman filter (EKF) are sensitive to measurement outliers and need accurate kinetic model. The machine learning methods are computational expensive and performance is unstable in different environments. To overcome the above problems, we propose to construct a joint trajectory smoothness and range constraint in a pose graph, which estimates robot poses over a sliding trajectory window at a single time instant. This removes the dependence on kinetic model and makes the system flexible and portable. Our algorithm is robust to outliers and even short-term measurement loss yet still with very low complexity. Extensive experiments under a variety of scenarios verify its stability and demonstrate a much higher accuracy than existing methods, especially in the attitude direction, which is challenging for existing methods due to an asymmetrical anchor distribution.