 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimeliness-Oriented Scheduling and Resource Allocation in Multi-Region Collaborative Perception
Jan 08, 2026Collaborative perception (CP) is a critical technology in applications like autonomous driving and smart cities. It involves the sharing and fusion of information among sensors to overcome the limitations of individual perception, such as blind spots and range limitations. However, CP faces two primary challenges. First, due to the dynamic nature of the environment, the timeliness of the transmitted information is critical to perception performance. Second, with limited computational power at the sensors and constrained wireless bandwidth, the communication volume must be carefully designed to ensure feature representations are both effective and sufficient. This work studies the dynamic scheduling problem in a multi-region CP scenario, and presents a Timeliness-Aware Multi-region Prioritized (TAMP) scheduling algorithm to trade-off perception accuracy and communication resource usage. Timeliness reflects the utility of information that decays as time elapses, which is manifested by the perception performance in CP tasks. We propose an empirical penalty function that maps the joint impact of Age of Information (AoI) and communication volume to perception performance. Aiming to minimize this timeliness-oriented penalty in the long-term, and recognizing that scheduling decisions have a cumulative effect on subsequent system states, we propose the TAMP scheduling algorithm. TAMP is a Lyapunov-based optimization policy that decomposes the long-term average objective into a per-slot prioritization problem, balancing the scheduling worth against resource cost. We validate our algorithm in both intersection and corridor scenarios with the real-world Roadside Cooperative perception (RCooper) dataset. Extensive simulations demonstrate that TAMP outperforms the best-performing baseline, achieving an Average Precision (AP) improvement of up to 27% across various configurations.
Self-Supervised Learning for Medical Image Data with Anatomy-Oriented Imaging Planes
Apr 07, 2024



Self-supervised learning has emerged as a powerful tool for pretraining deep networks on unlabeled data, prior to transfer learning of target tasks with limited annotation. The relevance between the pretraining pretext and target tasks is crucial to the success of transfer learning. Various pretext tasks have been proposed to utilize properties of medical image data (e.g., three dimensionality), which are more relevant to medical image analysis than generic ones for natural images. However, previous work rarely paid attention to data with anatomy-oriented imaging planes, e.g., standard cardiac magnetic resonance imaging views. As these imaging planes are defined according to the anatomy of the imaged organ, pretext tasks effectively exploiting this information can pretrain the networks to gain knowledge on the organ of interest. In this work, we propose two complementary pretext tasks for this group of medical image data based on the spatial relationship of the imaging planes. The first is to learn the relative orientation between the imaging planes and implemented as regressing their intersecting lines. The second exploits parallel imaging planes to regress their relative slice locations within a stack. Both pretext tasks are conceptually straightforward and easy to implement, and can be combined in multitask learning for better representation learning. Thorough experiments on two anatomical structures (heart and knee) and representative target tasks (semantic segmentation and classification) demonstrate that the proposed pretext tasks are effective in pretraining deep networks for remarkably boosted performance on the target tasks, and superior to other recent approaches.
A deep local attention network for pre-operative lymph node metastasis prediction in pancreatic cancer via multiphase CT imaging
Jan 04, 2023



Lymph node (LN) metastasis status is one of the most critical prognostic and cancer staging factors for patients with resectable pancreatic ductal adenocarcinoma (PDAC), or in general, for any types of solid malignant tumors. Preoperative prediction of LN metastasis from non-invasive CT imaging is highly desired, as it might be straightforwardly used to guide the following neoadjuvant treatment decision and surgical planning. Most studies only capture the tumor characteristics in CT imaging to implicitly infer LN metastasis and very few work exploit direct LN's CT imaging information. To the best of our knowledge, this is the first work to propose a fully-automated LN segmentation and identification network to directly facilitate the LN metastasis status prediction task. Nevertheless LN segmentation/detection is very challenging since LN can be easily confused with other hard negative anatomic structures (e.g., vessels) from radiological images. We explore the anatomical spatial context priors of pancreatic LN locations by generating a guiding attention map from related organs and vessels to assist segmentation and infer LN status. As such, LN segmentation is impelled to focus on regions that are anatomically adjacent or plausible with respect to the specific organs and vessels. The metastasized LN identification network is trained to classify the segmented LN instances into positives or negatives by reusing the segmentation network as a pre-trained backbone and padding a new classification head. More importantly, we develop a LN metastasis status prediction network that combines the patient-wise aggregation results of LN segmentation/identification and deep imaging features extracted from the tumor region. Extensive quantitative nested five-fold cross-validation is conducted on a discovery dataset of 749 patients with PDAC.
ReadNet:Towards Accurate ReID with Limited and Noisy Samples
May 12, 2020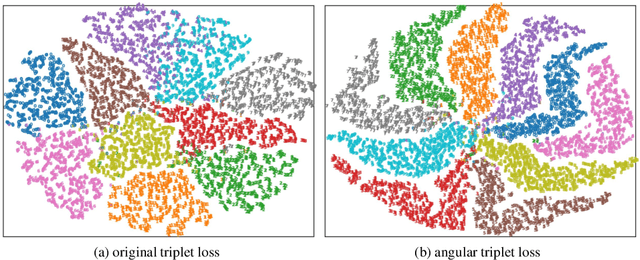
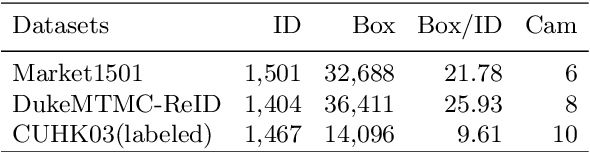
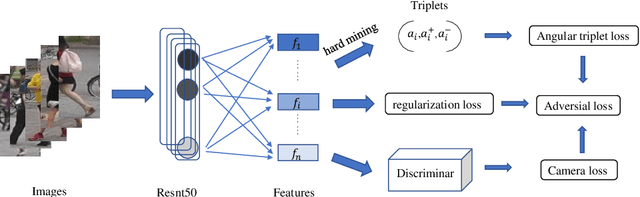
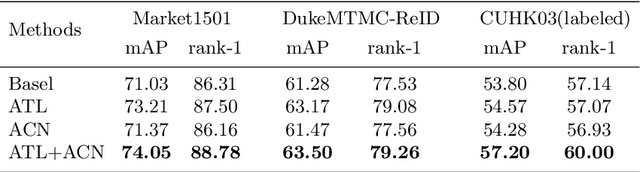
Person re-identification (ReID) is an essential cross-camera retrieval task to identify pedestrians. However, the photo number of each pedestrian usually differs drastically, and thus the data limitation and imbalance problem hinders the prediction accuracy greatly. Additionally, in real-world applications, pedestrian images are captured by different surveillance cameras, so the noisy camera related information, such as the lights, perspectives and resolutions, result in inevitable domain gaps for ReID algorithms. These challenges bring difficulties to current deep learning methods with triplet loss for coping with such problems. To address these challenges, this paper proposes ReadNet, an adversarial camera network (ACN) with an angular triplet loss (ATL). In detail, ATL focuses on learning the angular distance among different identities to mitigate the effect of data imbalance, and guarantees a linear decision boundary as well, while ACN takes the camera discriminator as a game opponent of feature extractor to filter camera related information to bridge the multi-camera gaps. ReadNet is designed to be flexible so that either ATL or ACN can be deployed independently or simultaneously. The experiment results on various benchmark datasets have shown that ReadNet can deliver better prediction performance than current state-of-the-art methods.