 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuzzy Information Evolution with Three-Way Decision in Social Network Group Decision-Making
May 22, 2025In group decision-making (GDM) scenarios, uncertainty, dynamic social structures, and vague information present major challenges for traditional opinion dynamics models. To address these issues, this study proposes a novel social network group decision-making (SNGDM) framework that integrates three-way decision (3WD) theory, dynamic network reconstruction, and linguistic opinion representation. First, the 3WD mechanism is introduced to explicitly model hesitation and ambiguity in agent judgments, thereby preventing irrational decisions. Second, a connection adjustment rule based on opinion similarity is developed, enabling agents to adaptively update their communication links and better reflect the evolving nature of social relationships. Third, linguistic terms are used to describe agent opinions, allowing the model to handle subjective, vague, or incomplete information more effectively. Finally, an integrated multi-agent decision-making framework is constructed, which simultaneously considers individual uncertainty, opinion evolution, and network dynamics. The proposed model is applied to a multi-UAV cooperative decision-making scenario, where simulation results and consensus analysis demonstrate its effectiveness. Experimental comparisons further verify the advantages of the algorithm in enhancing system stability and representing realistic decision-making behaviors.
Linguistic Fuzzy Information Evolution with Random Leader Election Mechanism for Decision-Making Systems
Oct 19, 2024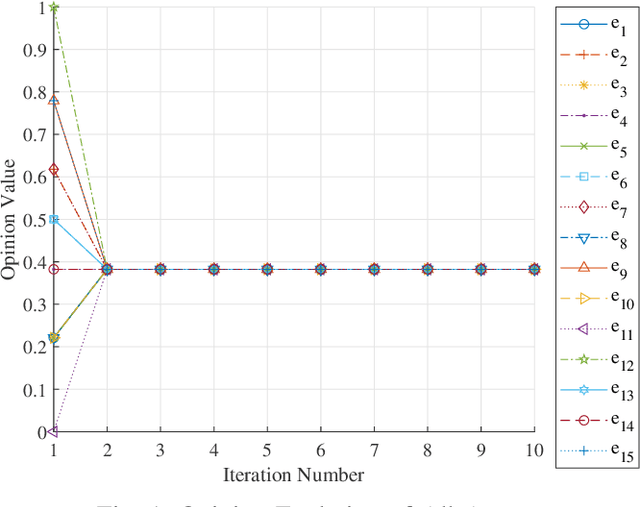
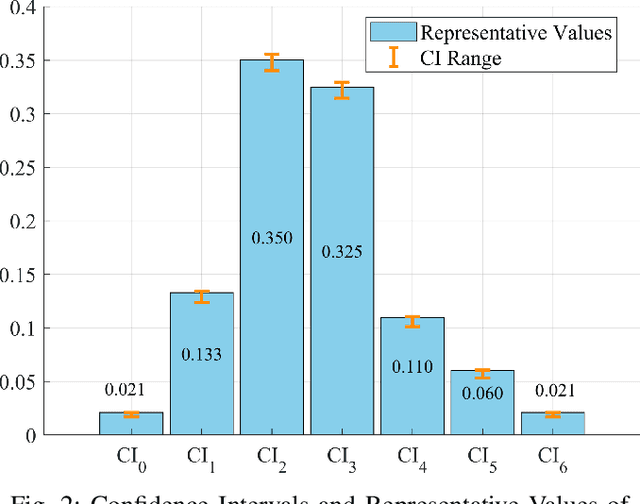
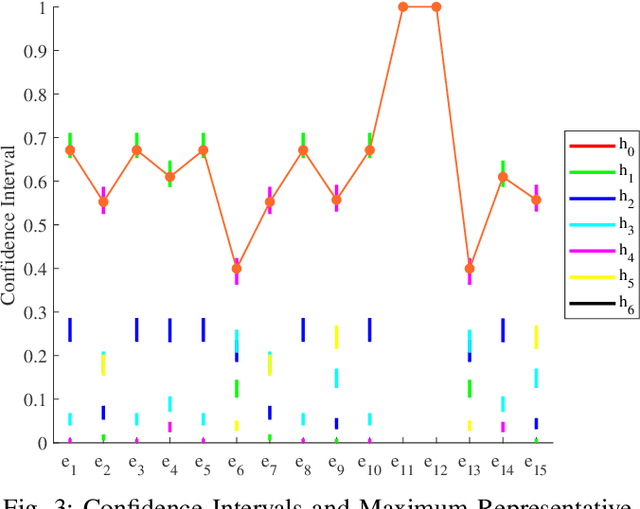
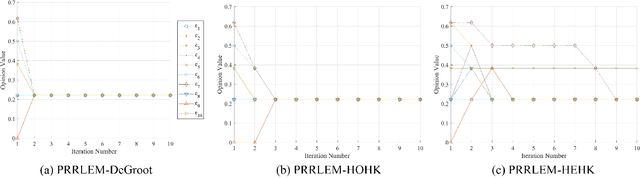
Linguistic fuzzy information evolution is crucial in understanding information exchange among agents. However, different agent weights may lead to different convergence results in the classic DeGroot model. Similarly, in the Hegselmann-Krause bounded confidence model (HK model), changing the confidence threshold values of agents can lead to differences in the final results. To address these limitations, this paper proposes three new models of linguistic fuzzy information dynamics: the per-round random leader election mechanism-based DeGroot model (PRRLEM-DeGroot), the PRRLEM-based homogeneous HK model (PRRLEM-HOHK), and the PRRLEM-based heterogeneous HK model (PRRLEM-HEHK). In these models, after each round of fuzzy information updates, an agent is randomly selected to act as a temporary leader with more significant influence, with the leadership structure being reset after each update. This strategy increases the information sharing and enhances decision-making by integrating multiple agents' evaluation information, which is also in line with real life (\emph{Leader is not unchanged}). The Monte Carlo method is then employed to simulate the behavior of complex systems through repeated random tests, obtaining confidence intervals for different fuzzy information. Subsequently, an improved golden rule representative value (GRRV) in fuzzy theory is proposed to rank these confidence intervals. Simulation examples and a real-world scenario about space situational awareness validate the effectiveness of the proposed models. Comparative analysis with the other models demonstrate our ability to address the echo chamber and improve the robustness.
Learning Resilient Formation Control of Drones with Graph Attention Network
Sep 03, 2024The rapid advancement of drone technology has significantly impacted various sectors, including search and rescue, environmental surveillance, and industrial inspection. Multidrone systems offer notable advantages such as enhanced efficiency, scalability, and redundancy over single-drone operations. Despite these benefits, ensuring resilient formation control in dynamic and adversarial environments, such as under communication loss or cyberattacks, remains a significant challenge. Classical approaches to resilient formation control, while effective in certain scenarios, often struggle with complex modeling and the curse of dimensionality, particularly as the number of agents increases. This paper proposes a novel, learning-based formation control for enhancing the adaptability and resilience of multidrone formations using graph attention networks (GATs). By leveraging GAT's dynamic capabilities to extract internode relationships based on the attention mechanism, this GAT-based formation controller significantly improves the robustness of drone formations against various threats, such as Denial of Service (DoS) attacks. Our approach not only improves formation performance in normal conditions but also ensures the resilience of multidrone systems in variable and adversarial environments. Extensive simulation results demonstrate the superior performance of our method over baseline formation controllers. Furthermore, the physical experiments validate the effectiveness of the trained control policy in real-world flights.