 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Stage Invariant Continual Learning under Extreme Visual Sparsity
Mar 27, 2026Continual learning seeks to maintain stable adaptation under non-stationary environments, yet this problem becomes particularly challenging in object detection, where most existing methods implicitly assume relatively balanced visual conditions. In extreme-sparsity regimes, such as those observed in space-based resident space object (RSO) detection scenarios, foreground signals are overwhelmingly dominated by background observations. Under such conditions, we analytically demonstrate that background-driven gradients destabilize the feature backbone during sequential domain shifts, causing progressive representation drift. This exposes a structural limitation of continual learning approaches relying solely on output-level distillation, as they fail to preserve intermediate representation stability. To address this, we propose a dual-stage invariant continual learning framework via joint distillation, enforcing structural and semantic consistency on both backbone representations and detection predictions, respectively, thereby suppressing error propagation at its source while maintaining adaptability. Furthermore, to regulate gradient statistics under severe imbalance, we introduce a sparsity-aware data conditioning strategy combining patch-based sampling and distribution-aware augmentation. Experiments on a high-resolution space-based RSO detection dataset show consistent improvement over established continual object detection methods, achieving an absolute gain of +4.0 mAP under sequential domain shifts.
Learning Adaptive Cross-Embodiment Visuomotor Policy with Contrastive Prompt Orchestration
Feb 01, 2026Learning adaptive visuomotor policies for embodied agents remains a formidable challenge, particularly when facing cross-embodiment variations such as diverse sensor configurations and dynamic properties. Conventional learning approaches often struggle to separate task-relevant features from domain-specific variations (e.g., lighting, field-of-view, and rotation), leading to poor sample efficiency and catastrophic failure in unseen environments. To bridge this gap, we propose ContrAstive Prompt Orchestration (CAPO), a novel approach for learning visuomotor policies that integrates contrastive prompt learning and adaptive prompt orchestration. For prompt learning, we devise a hybrid contrastive learning strategy that integrates visual, temporal action, and text objectives to establish a pool of learnable prompts, where each prompt induces a visual representation encapsulating fine-grained domain factors. Based on these learned prompts, we introduce an adaptive prompt orchestration mechanism that dynamically aggregates these prompts conditioned on current observations. This enables the agent to adaptively construct optimal state representations by identifying dominant domain factors instantaneously. Consequently, the policy optimization is effectively shielded from irrelevant interference, preventing the common issue of overfitting to source domains. Extensive experiments demonstrate that CAPO significantly outperforms state-of-the-art baselines in sample efficiency and asymptotic performance. Crucially, it exhibits superior zero-shot adaptation across unseen target domains characterized by drastic environmental (e.g., illumination) and physical shifts (e.g., field-of-view and rotation), validating its effectiveness as a viable solution for cross-embodiment visuomotor policy adaptation.
ReviBranch: Deep Reinforcement Learning for Branch-and-Bound with Revived Trajectories
Aug 24, 2025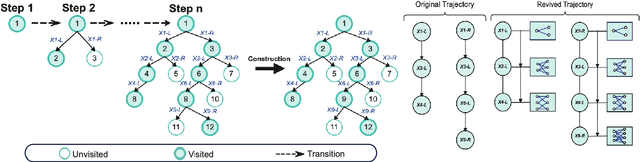
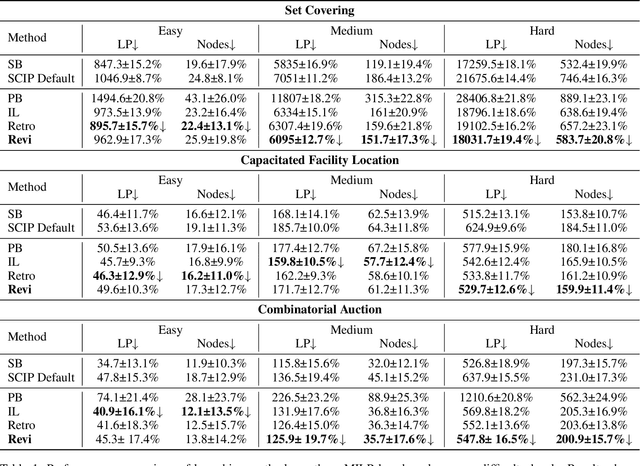
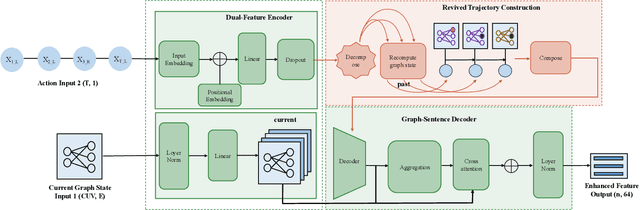
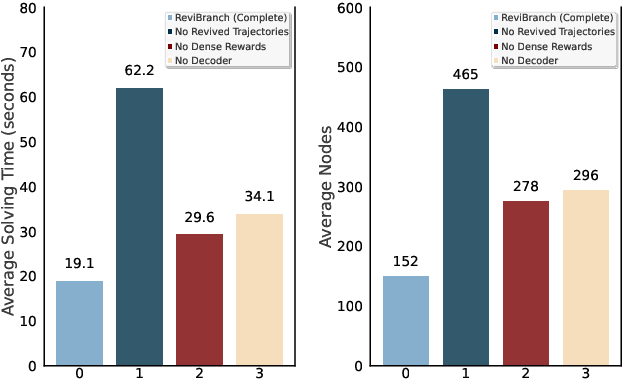
The Branch-and-bound (B&B) algorithm is the main solver for Mixed Integer Linear Programs (MILPs), where the selection of branching variable is essential to computational efficiency. However, traditional heuristics for branching often fail to generalize across heterogeneous problem instances, while existing learning-based methods such as imitation learning (IL) suffers from dependence on expert demonstration quality, and reinforcement learning (RL) struggles with limitations in sparse rewards and dynamic state representation challenges. To address these issues, we propose ReviBranch, a novel deep RL framework that constructs revived trajectories by reviving explicit historical correspondences between branching decisions and their corresponding graph states along search-tree paths. During training, ReviBranch enables agents to learn from complete structural evolution and temporal dependencies within the branching process. Additionally, we introduce an importance-weighted reward redistribution mechanism that transforms sparse terminal rewards into dense stepwise feedback, addressing the sparse reward challenge. Extensive experiments on different MILP benchmarks demonstrate that ReviBranch outperforms state-of-the-art RL methods, reducing B&B nodes by 4.0% and LP iterations by 2.2% on large-scale instances. The results highlight the robustness and generalizability of ReviBranch across heterogeneous MILP problem classes.
Grounded Vision-Language Navigation for UAVs with Open-Vocabulary Goal Understanding
Jun 12, 2025Vision-and-language navigation (VLN) is a long-standing challenge in autonomous robotics, aiming to empower agents with the ability to follow human instructions while navigating complex environments. Two key bottlenecks remain in this field: generalization to out-of-distribution environments and reliance on fixed discrete action spaces. To address these challenges, we propose Vision-Language Fly (VLFly), a framework tailored for Unmanned Aerial Vehicles (UAVs) to execute language-guided flight. Without the requirement for localization or active ranging sensors, VLFly outputs continuous velocity commands purely from egocentric observations captured by an onboard monocular camera. The VLFly integrates three modules: an instruction encoder based on a large language model (LLM) that reformulates high-level language into structured prompts, a goal retriever powered by a vision-language model (VLM) that matches these prompts to goal images via vision-language similarity, and a waypoint planner that generates executable trajectories for real-time UAV control. VLFly is evaluated across diverse simulation environments without additional fine-tuning and consistently outperforms all baselines. Moreover, real-world VLN tasks in indoor and outdoor environments under direct and indirect instructions demonstrate that VLFly achieves robust open-vocabulary goal understanding and generalized navigation capabilities, even in the presence of abstract language input.
FM-Planner: Foundation Model Guided Path Planning for Autonomous Drone Navigation
May 27, 2025Path planning is a critical component in autonomous drone operations, enabling safe and efficient navigation through complex environments. Recent advances in foundation models, particularly large language models (LLMs) and vision-language models (VLMs), have opened new opportunities for enhanced perception and intelligent decision-making in robotics. However, their practical applicability and effectiveness in global path planning remain relatively unexplored. This paper proposes foundation model-guided path planners (FM-Planner) and presents a comprehensive benchmarking study and practical validation for drone path planning. Specifically, we first systematically evaluate eight representative LLM and VLM approaches using standardized simulation scenarios. To enable effective real-time navigation, we then design an integrated LLM-Vision planner that combines semantic reasoning with visual perception. Furthermore, we deploy and validate the proposed path planner through real-world experiments under multiple configurations. Our findings provide valuable insights into the strengths, limitations, and feasibility of deploying foundation models in real-world drone applications and providing practical implementations in autonomous flight. Project site: https://github.com/NTU-ICG/FM-Planner.
Learning Resilient Formation Control of Drones with Graph Attention Network
Sep 03, 2024The rapid advancement of drone technology has significantly impacted various sectors, including search and rescue, environmental surveillance, and industrial inspection. Multidrone systems offer notable advantages such as enhanced efficiency, scalability, and redundancy over single-drone operations. Despite these benefits, ensuring resilient formation control in dynamic and adversarial environments, such as under communication loss or cyberattacks, remains a significant challenge. Classical approaches to resilient formation control, while effective in certain scenarios, often struggle with complex modeling and the curse of dimensionality, particularly as the number of agents increases. This paper proposes a novel, learning-based formation control for enhancing the adaptability and resilience of multidrone formations using graph attention networks (GATs). By leveraging GAT's dynamic capabilities to extract internode relationships based on the attention mechanism, this GAT-based formation controller significantly improves the robustness of drone formations against various threats, such as Denial of Service (DoS) attacks. Our approach not only improves formation performance in normal conditions but also ensures the resilience of multidrone systems in variable and adversarial environments. Extensive simulation results demonstrate the superior performance of our method over baseline formation controllers. Furthermore, the physical experiments validate the effectiveness of the trained control policy in real-world flights.
Clustering-based Learning for UAV Tracking and Pose Estimation
May 27, 2024UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team "NTU-ICG" for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
Vision-based Learning for Drones: A Survey
Dec 08, 2023Drones as advanced cyber-physical systems are undergoing a transformative shift with the advent of vision-based learning, a field that is rapidly gaining prominence due to its profound impact on drone autonomy and functionality. Different from existing task-specific surveys, this review offers a comprehensive overview of vision-based learning in drones, emphasizing its pivotal role in enhancing their operational capabilities. We start by elucidating the fundamental principles of vision-based learning, highlighting how it significantly improves drones' visual perception and decision-making processes. We then categorize vision-based control methods into indirect, semi-direct, and end-to-end approaches from the perception-control perspective. We further explore various applications of vision-based drones with learning capabilities, ranging from single-agent systems to more complex multi-agent and heterogeneous system scenarios, and underscore the challenges and innovations characterizing each area. Finally, we explore open questions and potential solutions, paving the way for ongoing research and development in this dynamic and rapidly evolving field. With growing large language models (LLMs) and embodied intelligence, vision-based learning for drones provides a promising but challenging road towards artificial general intelligence (AGI) in 3D physical world.
Target Search and Navigation in Heterogeneous Robot Systems with Deep Reinforcement Learning
Aug 01, 2023Collaborative heterogeneous robot systems can greatly improve the efficiency of target search and navigation tasks. In this paper, we design a heterogeneous robot system consisting of a UAV and a UGV for search and rescue missions in unknown environments. The system is able to search for targets and navigate to them in a maze-like mine environment with the policies learned through deep reinforcement learning algorithms. During the training process, if two robots are trained simultaneously, the rewards related to their collaboration may not be properly obtained. Hence, we introduce a multi-stage reinforcement learning framework and a curiosity module to encourage agents to explore unvisited environments. Experiments in simulation environments show that our framework can train the heterogeneous robot system to achieve the search and navigation with unknown target locations while existing baselines may not, and accelerate the training speed.
EEG-based Sleep Staging with Hybrid Attention
May 16, 2023

Sleep staging is critical for assessing sleep quality and diagnosing sleep disorders. However, capturing both the spatial and temporal relationships within electroencephalogram (EEG) signals during different sleep stages remains challenging. In this paper, we propose a novel framework called the Hybrid Attention EEG Sleep Staging (HASS) Framework. Specifically, we propose a well-designed spatio-temporal attention mechanism to adaptively assign weights to inter-channels and intra-channel EEG segments based on the spatio-temporal relationship of the brain during different sleep stages. Experiment results on the MASS and ISRUC datasets demonstrate that HASS can significantly improve typical sleep staging networks. Our proposed framework alleviates the difficulties of capturing the spatial-temporal relationship of EEG signals during sleep staging and holds promise for improving the accuracy and reliability of sleep assessment in both clinical and research settings.