 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Target Search with a Visual Drone Swarm: An Adaptive Curriculum Embedded Multi-stage Reinforcement Learning Approach
Paper and Code

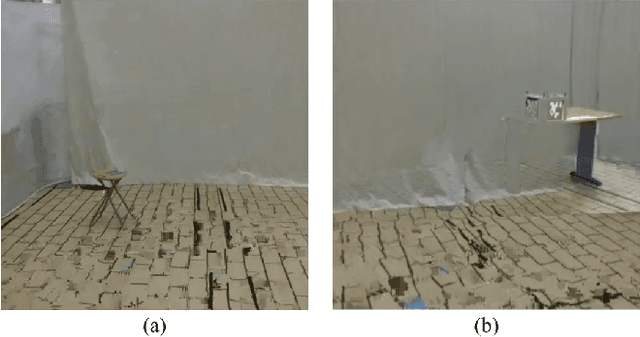

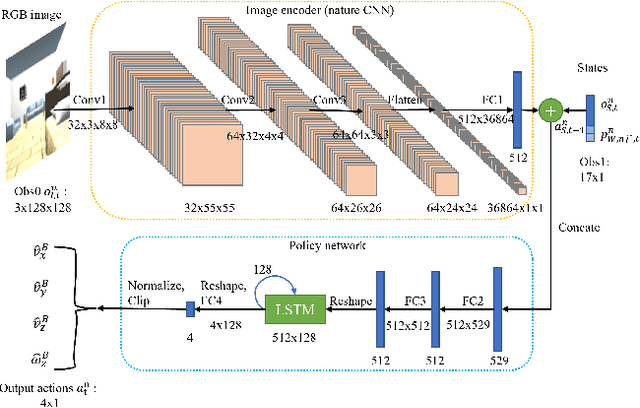
Equipping drones with target search capabilities is desirable for applications in disaster management scenarios and smart warehouse delivery systems. Instead of deploying a single drone, an intelligent drone swarm that can collaborate with one another in maneuvering among obstacles will be more effective in accomplishing the target search in a shorter amount of time. In this work, we propose a data-efficient reinforcement learning-based approach, Adaptive Curriculum Embedded Multi-Stage Learning (ACEMSL), to address the challenges of carrying out a collaborative target search with a visual drone swarm, namely the 3D sparse reward space exploration and the collaborative behavior requirement. Specifically, we develop an adaptive embedded curriculum, where the task difficulty level can be adaptively adjusted according to the success rate achieved in training. Meanwhile, with multi-stage learning, ACEMSL allows data-efficient training and individual-team reward allocation for the collaborative drone swarm. The effectiveness and generalization capability of our approach are validated using simulations and actual flight tests.