 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVidLaDA: Bidirectional Diffusion Large Language Models for Efficient Video Understanding
Jan 25, 2026Standard Autoregressive Video LLMs inevitably suffer from causal masking biases that hinder global spatiotemporal modeling, leading to suboptimal understanding efficiency. We propose VidLaDA, a Video LLM based on Diffusion Language Model utilizing bidirectional attention to capture bidirectional dependencies. To further tackle the inference bottleneck of diffusion decoding on massive video tokens, we introduce MARS-Cache. This framework accelerates inference by combining asynchronous visual cache refreshing with frame-wise chunk attention, effectively pruning redundancy while preserving global connectivity via anchor tokens. Extensive experiments show VidLaDA outperforms diffusion baselines and rivals state-of-the-art autoregressive models (e.g., Qwen2.5-VL and LLaVA-Video), with MARS-Cache delivering over 12x speedup without compromising reasoning accuracy. Code and checkpoints are open-sourced at https://github.com/ziHoHe/VidLaDA.
Enhancing Video Large Language Models with Structured Multi-Video Collaborative Reasoning (early version)
Sep 16, 2025Despite the prosperity of the video language model, the current pursuit of comprehensive video reasoning is thwarted by the inherent spatio-temporal incompleteness within individual videos, resulting in hallucinations and inaccuracies. A promising solution is to augment the reasoning performance with multiple related videos. However, video tokens are numerous and contain redundant information, so directly feeding the relevant video data into a large language model to enhance responses could be counterproductive. To address this challenge, we propose a multi-video collaborative framework for video language models. For efficient and flexible video representation, we establish a Video Structuring Module to represent the video's knowledge as a spatio-temporal graph. Based on the structured video representation, we design the Graph Fusion Module to fuse the structured knowledge and valuable information from related videos into the augmented graph node tokens. Finally, we construct an elaborate multi-video structured prompt to integrate the graph, visual, and textual tokens as the input to the large language model. Extensive experiments substantiate the effectiveness of our framework, showcasing its potential as a promising avenue for advancing video language models.
ProgD: Progressive Multi-scale Decoding with Dynamic Graphs for Joint Multi-agent Motion Forecasting
Sep 11, 2025Accurate motion prediction of surrounding agents is crucial for the safe planning of autonomous vehicles. Recent advancements have extended prediction techniques from individual agents to joint predictions of multiple interacting agents, with various strategies to address complex interactions within future motions of agents. However, these methods overlook the evolving nature of these interactions. To address this limitation, we propose a novel progressive multi-scale decoding strategy, termed ProgD, with the help of dynamic heterogeneous graph-based scenario modeling. In particular, to explicitly and comprehensively capture the evolving social interactions in future scenarios, given their inherent uncertainty, we design a progressive modeling of scenarios with dynamic heterogeneous graphs. With the unfolding of such dynamic heterogeneous graphs, a factorized architecture is designed to process the spatio-temporal dependencies within future scenarios and progressively eliminate uncertainty in future motions of multiple agents. Furthermore, a multi-scale decoding procedure is incorporated to improve on the future scenario modeling and consistent prediction of agents' future motion. The proposed ProgD achieves state-of-the-art performance on the INTERACTION multi-agent prediction benchmark, ranking $1^{st}$, and the Argoverse 2 multi-world forecasting benchmark.
MCA: 2D-3D Retrieval with Noisy Labels via Multi-level Adaptive Correction and Alignment
Aug 08, 2025With the increasing availability of 2D and 3D data, significant advancements have been made in the field of cross-modal retrieval. Nevertheless, the existence of imperfect annotations presents considerable challenges, demanding robust solutions for 2D-3D cross-modal retrieval in the presence of noisy label conditions. Existing methods generally address the issue of noise by dividing samples independently within each modality, making them susceptible to overfitting on corrupted labels. To address these issues, we propose a robust 2D-3D \textbf{M}ulti-level cross-modal adaptive \textbf{C}orrection and \textbf{A}lignment framework (MCA). Specifically, we introduce a Multimodal Joint label Correction (MJC) mechanism that leverages multimodal historical self-predictions to jointly model the modality prediction consistency, enabling reliable label refinement. Additionally, we propose a Multi-level Adaptive Alignment (MAA) strategy to effectively enhance cross-modal feature semantics and discrimination across different levels. Extensive experiments demonstrate the superiority of our method, MCA, which achieves state-of-the-art performance on both conventional and realistic noisy 3D benchmarks, highlighting its generality and effectiveness.
ABC: Adaptive BayesNet Structure Learning for Computational Scalable Multi-task Image Compression
Jun 18, 2025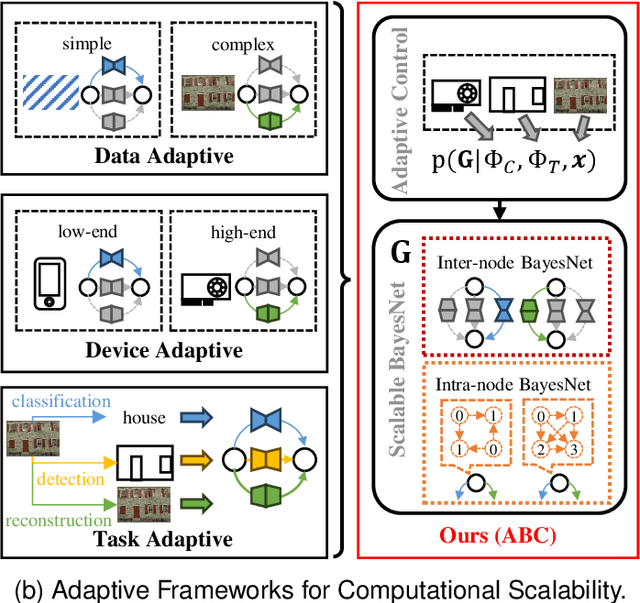
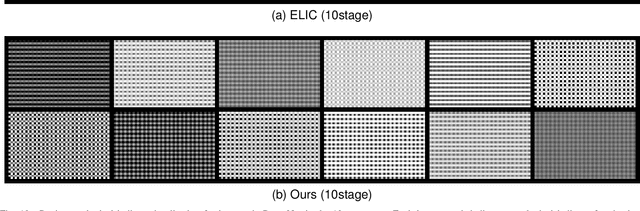
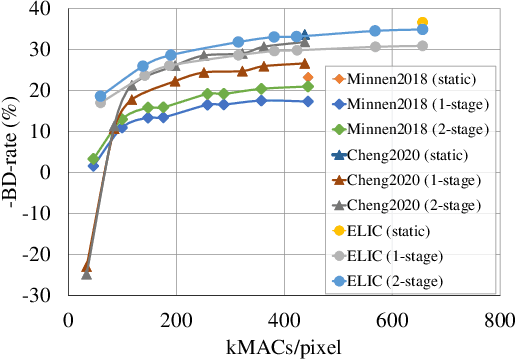
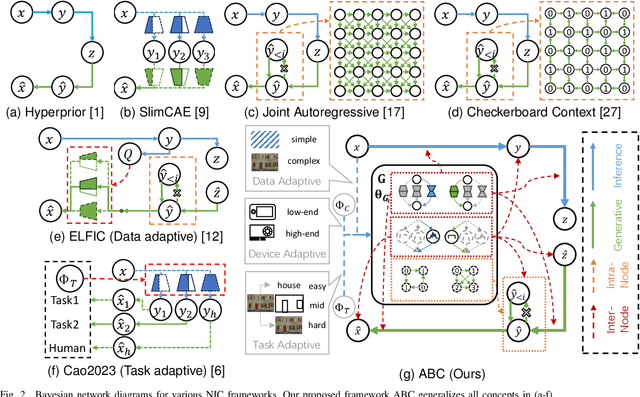
Neural Image Compression (NIC) has revolutionized image compression with its superior rate-distortion performance and multi-task capabilities, supporting both human visual perception and machine vision tasks. However, its widespread adoption is hindered by substantial computational demands. While existing approaches attempt to address this challenge through module-specific optimizations or pre-defined complexity levels, they lack comprehensive control over computational complexity. We present ABC (Adaptive BayesNet structure learning for computational scalable multi-task image Compression), a novel, comprehensive framework that achieves computational scalability across all NIC components through Bayesian network (BayesNet) structure learning. ABC introduces three key innovations: (i) a heterogeneous bipartite BayesNet (inter-node structure) for managing neural backbone computations; (ii) a homogeneous multipartite BayesNet (intra-node structure) for optimizing autoregressive unit processing; and (iii) an adaptive control module that dynamically adjusts the BayesNet structure based on device capabilities, input data complexity, and downstream task requirements. Experiments demonstrate that ABC enables full computational scalability with better complexity adaptivity and broader complexity control span, while maintaining competitive compression performance. Furthermore, the framework's versatility allows integration with various NIC architectures that employ BayesNet representations, making it a robust solution for ensuring computational scalability in NIC applications. Code is available in https://github.com/worldlife123/cbench_BaSIC.
CogStream: Context-guided Streaming Video Question Answering
Jun 12, 2025



Despite advancements in Video Large Language Models (Vid-LLMs) improving multimodal understanding, challenges persist in streaming video reasoning due to its reliance on contextual information. Existing paradigms feed all available historical contextual information into Vid-LLMs, resulting in a significant computational burden for visual data processing. Furthermore, the inclusion of irrelevant context distracts models from key details. This paper introduces a challenging task called Context-guided Streaming Video Reasoning (CogStream), which simulates real-world streaming video scenarios, requiring models to identify the most relevant historical contextual information to deduce answers for questions about the current stream. To support CogStream, we present a densely annotated dataset featuring extensive and hierarchical question-answer pairs, generated by a semi-automatic pipeline. Additionally, we present CogReasoner as a baseline model. It efficiently tackles this task by leveraging visual stream compression and historical dialogue retrieval. Extensive experiments prove the effectiveness of this method. Code will be released soon.
Looking Beyond Visible Cues: Implicit Video Question Answering via Dual-Clue Reasoning
Jun 09, 2025



Video Question Answering (VideoQA) aims to answer natural language questions based on the given video, with prior work primarily focusing on identifying the duration of relevant segments, referred to as explicit visual evidence. However, explicit visual evidence is not always directly available, particularly when questions target symbolic meanings or deeper intentions, leading to significant performance degradation. To fill this gap, we introduce a novel task and dataset, $\textbf{I}$mplicit $\textbf{V}$ideo $\textbf{Q}$uestion $\textbf{A}$nswering (I-VQA), which focuses on answering questions in scenarios where explicit visual evidence is inaccessible. Given an implicit question and its corresponding video, I-VQA requires answering based on the contextual visual cues present within the video. To tackle I-VQA, we propose a novel reasoning framework, IRM (Implicit Reasoning Model), incorporating dual-stream modeling of contextual actions and intent clues as implicit reasoning chains. IRM comprises the Action-Intent Module (AIM) and the Visual Enhancement Module (VEM). AIM deduces and preserves question-related dual clues by generating clue candidates and performing relation deduction. VEM enhances contextual visual representation by leveraging key contextual clues. Extensive experiments validate the effectiveness of our IRM in I-VQA tasks, outperforming GPT-4o, OpenAI-o3, and fine-tuned VideoChat2 by $0.76\%$, $1.37\%$, and $4.87\%$, respectively. Additionally, IRM performs SOTA on similar implicit advertisement understanding and future prediction in traffic-VQA. Datasets and codes are available for double-blind review in anonymous repo: https://github.com/tychen-SJTU/Implicit-VideoQA.
Unleashing Diffusion Transformers for Visual Correspondence by Modulating Massive Activations
May 24, 2025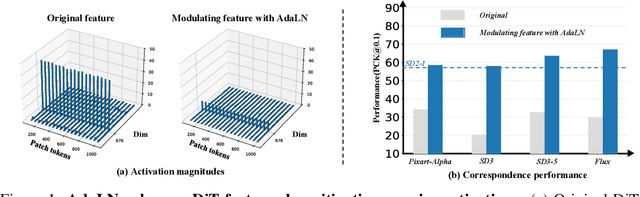
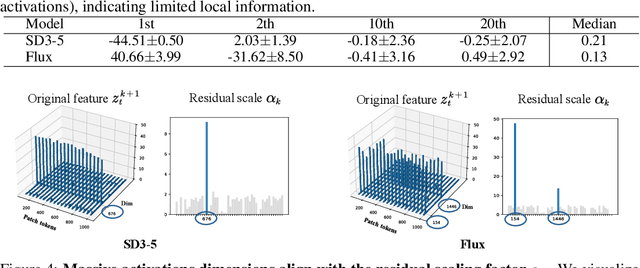
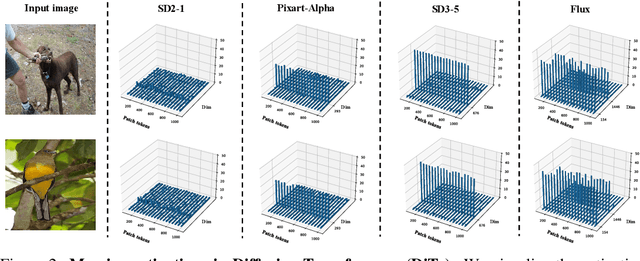
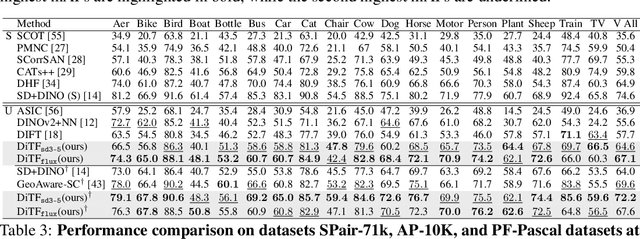
Pre-trained stable diffusion models (SD) have shown great advances in visual correspondence. In this paper, we investigate the capabilities of Diffusion Transformers (DiTs) for accurate dense correspondence. Distinct from SD, DiTs exhibit a critical phenomenon in which very few feature activations exhibit significantly larger values than others, known as \textit{massive activations}, leading to uninformative representations and significant performance degradation for DiTs. The massive activations consistently concentrate at very few fixed dimensions across all image patch tokens, holding little local information. We trace these dimension-concentrated massive activations and find that such concentration can be effectively localized by the zero-initialized Adaptive Layer Norm (AdaLN-zero). Building on these findings, we propose Diffusion Transformer Feature (DiTF), a training-free framework designed to extract semantic-discriminative features from DiTs. Specifically, DiTF employs AdaLN to adaptively localize and normalize massive activations with channel-wise modulation. In addition, we develop a channel discard strategy to further eliminate the negative impacts from massive activations. Experimental results demonstrate that our DiTF outperforms both DINO and SD-based models and establishes a new state-of-the-art performance for DiTs in different visual correspondence tasks (\eg, with +9.4\% on Spair-71k and +4.4\% on AP-10K-C.S.).
Head-Aware KV Cache Compression for Efficient Visual Autoregressive Modeling
Apr 12, 2025Visual Autoregressive (VAR) models have emerged as a powerful approach for multi-modal content creation, offering high efficiency and quality across diverse multimedia applications. However, they face significant memory bottlenecks due to extensive KV cache accumulation during inference. Existing KV cache compression techniques for large language models are suboptimal for VAR models due to, as we identify in this paper, two distinct categories of attention heads in VAR models: Structural Heads, which preserve spatial coherence through diagonal attention patterns, and Contextual Heads, which maintain semantic consistency through vertical attention patterns. These differences render single-strategy KV compression techniques ineffective for VAR models. To address this, we propose HACK, a training-free Head-Aware Compression method for KV cache. HACK allocates asymmetric cache budgets and employs pattern-specific compression strategies tailored to the essential characteristics of each head category. Experiments on Infinity-2B, Infinity-8B, and VAR-d30 demonstrate its effectiveness in text-to-image and class-conditional generation tasks. HACK can hack down up to 50\% and 70\% of cache with minimal performance degradation for VAR-d30 and Infinity-8B, respectively. Even with 70\% and 90\% KV cache compression in VAR-d30 and Infinity-8B, HACK still maintains high-quality generation while reducing memory usage by 44.2\% and 58.9\%, respectively.
CAKE: Cascading and Adaptive KV Cache Eviction with Layer Preferences
Mar 16, 2025



Large language models (LLMs) excel at processing long sequences, boosting demand for key-value (KV) caching. While recent efforts to evict KV cache have alleviated the inference burden, they often fail to allocate resources rationally across layers with different attention patterns. In this paper, we introduce Cascading and Adaptive KV cache Eviction (CAKE), a novel approach that frames KV cache eviction as a "cake-slicing problem." CAKE assesses layer-specific preferences by considering attention dynamics in both spatial and temporal dimensions, allocates rational cache size for layers accordingly, and manages memory constraints in a cascading manner. This approach enables a global view of cache allocation, adaptively distributing resources across diverse attention mechanisms while maintaining memory budgets. CAKE also employs a new eviction indicator that considers the shifting importance of tokens over time, addressing limitations in existing methods that overlook temporal dynamics. Comprehensive experiments on LongBench and NeedleBench show that CAKE maintains model performance with only 3.2% of the KV cache and consistently outperforms current baselines across various models and memory constraints, particularly in low-memory settings. Additionally, CAKE achieves over 10x speedup in decoding latency compared to full cache when processing contexts of 128K tokens with FlashAttention-2. Our code is available at https://github.com/antgroup/cakekv.