 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWell Begun, Half Done: Reinforcement Learning with Prefix Optimization for LLM Reasoning
Dec 17, 2025Reinforcement Learning with Verifiable Rewards (RLVR) significantly enhances the reasoning capability of Large Language Models (LLMs). Current RLVR approaches typically conduct training across all generated tokens, but neglect to explore which tokens (e.g., prefix tokens) actually contribute to reasoning. This uniform training strategy spends substantial effort on optimizing low-return tokens, which in turn impedes the potential improvement from high-return tokens and reduces overall training effectiveness. To address this issue, we propose a novel RLVR approach called Progressive Prefix-token Policy Optimization (PPPO), which highlights the significance of the prefix segment of generated outputs. Specifically, inspired by the well-established human thinking theory of Path Dependence, where early-stage thoughts substantially constrain subsequent thinking trajectory, we identify an analogous phenomenon in LLM reasoning termed Beginning Lock-in Effect (BLE). PPPO leverages this finding by focusing its optimization objective on the prefix reasoning process of LLMs. This targeted optimization strategy can positively influence subsequent reasoning processes, and ultimately improve final results. To improve the learning effectiveness of LLMs on how to start reasoning with high quality, PPPO introduces two training strategies: (a) Progressive Prefix Retention, which shapes a progressive learning process by increasing the proportion of retained prefix tokens during training; (b) Continuation Accumulated Reward, which mitigates reward bias by sampling multiple continuations for one prefix token sequence, and accumulating their scores as the reward signal. Extensive experimental results on various reasoning tasks demonstrate that our proposed PPPO outperforms representative RLVR methods, with the accuracy improvements of 18.02% on only 26.17% training tokens.
CogStream: Context-guided Streaming Video Question Answering
Jun 12, 2025



Despite advancements in Video Large Language Models (Vid-LLMs) improving multimodal understanding, challenges persist in streaming video reasoning due to its reliance on contextual information. Existing paradigms feed all available historical contextual information into Vid-LLMs, resulting in a significant computational burden for visual data processing. Furthermore, the inclusion of irrelevant context distracts models from key details. This paper introduces a challenging task called Context-guided Streaming Video Reasoning (CogStream), which simulates real-world streaming video scenarios, requiring models to identify the most relevant historical contextual information to deduce answers for questions about the current stream. To support CogStream, we present a densely annotated dataset featuring extensive and hierarchical question-answer pairs, generated by a semi-automatic pipeline. Additionally, we present CogReasoner as a baseline model. It efficiently tackles this task by leveraging visual stream compression and historical dialogue retrieval. Extensive experiments prove the effectiveness of this method. Code will be released soon.
Fast-Slow-Thinking: Complex Task Solving with Large Language Models
Apr 11, 2025Nowadays, Large Language Models (LLMs) have been gradually employed to solve complex tasks. To face the challenge, task decomposition has become an effective way, which proposes to divide a complex task into multiple simpler subtasks and then solve them separately so that the difficulty of the original task can be reduced. However, the performance of existing task decomposition methods can be suboptimal when the task contains overly complex logic and constraints. In this situation, the solution generated by LLMs may deviate from the original purpose of the task, or contain redundant or even erroneous content. Therefore, inspired by the fact that humans possess two thinking systems including fast thinking and slow thinking, this paper introduces a new task decomposition method termed ``Fast-Slow-Thinking'' (FST), which stimulates LLMs to solve tasks through the cooperation of Fast Thinking (FT) and Slow Thinking (ST) steps. Here FT focuses more on the general and concise aspect of the task, and ST focuses more on the details of the task. In FT, LLMs are prompted to remove the constraints of the original task, therefore simplifying it to a general and concise one. In ST, we recall the constraints removed in FT, so that LLMs can improve the answer generated in FT to meet the requirements of the original task. Therefore, our FST method enables LLMs to consider a complex problem via a human-like cognition process from coarse to fine, the effectiveness of which has been well demonstrated by the experiments on three types of tasks.
Graph Retrieval-Augmented LLM for Conversational Recommendation Systems
Mar 09, 2025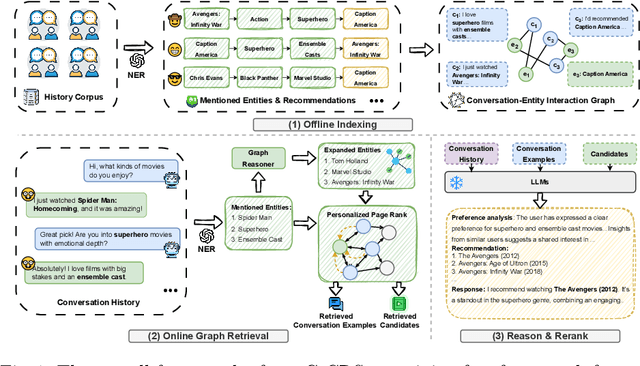
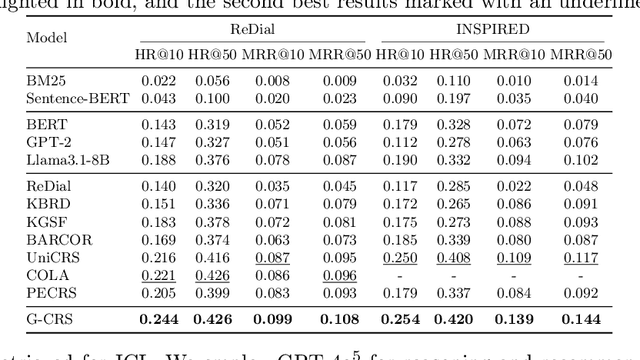
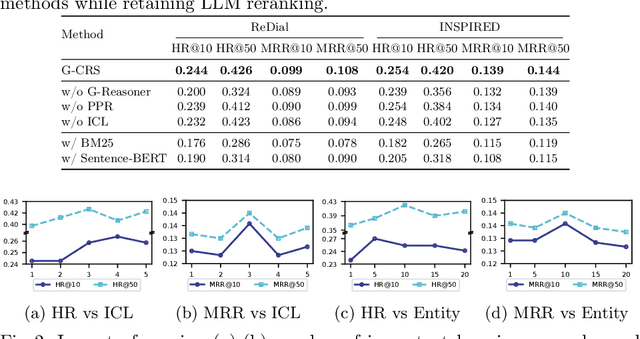
Conversational Recommender Systems (CRSs) have emerged as a transformative paradigm for offering personalized recommendations through natural language dialogue. However, they face challenges with knowledge sparsity, as users often provide brief, incomplete preference statements. While recent methods have integrated external knowledge sources to mitigate this, they still struggle with semantic understanding and complex preference reasoning. Recent Large Language Models (LLMs) demonstrate promising capabilities in natural language understanding and reasoning, showing significant potential for CRSs. Nevertheless, due to the lack of domain knowledge, existing LLM-based CRSs either produce hallucinated recommendations or demand expensive domain-specific training, which largely limits their applicability. In this work, we present G-CRS (Graph Retrieval-Augmented Large Language Model for Conversational Recommender Systems), a novel training-free framework that combines graph retrieval-augmented generation and in-context learning to enhance LLMs' recommendation capabilities. Specifically, G-CRS employs a two-stage retrieve-and-recommend architecture, where a GNN-based graph reasoner first identifies candidate items, followed by Personalized PageRank exploration to jointly discover potential items and similar user interactions. These retrieved contexts are then transformed into structured prompts for LLM reasoning, enabling contextually grounded recommendations without task-specific training. Extensive experiments on two public datasets show that G-CRS achieves superior recommendation performance compared to existing methods without requiring task-specific training.
GFM-RAG: Graph Foundation Model for Retrieval Augmented Generation
Feb 03, 2025



Retrieval-augmented generation (RAG) has proven effective in integrating knowledge into large language models (LLMs). However, conventional RAGs struggle to capture complex relationships between pieces of knowledge, limiting their performance in intricate reasoning that requires integrating knowledge from multiple sources. Recently, graph-enhanced retrieval augmented generation (GraphRAG) builds graph structure to explicitly model these relationships, enabling more effective and efficient retrievers. Nevertheless, its performance is still hindered by the noise and incompleteness within the graph structure. To address this, we introduce GFM-RAG, a novel graph foundation model (GFM) for retrieval augmented generation. GFM-RAG is powered by an innovative graph neural network that reasons over graph structure to capture complex query-knowledge relationships. The GFM with 8M parameters undergoes a two-stage training process on large-scale datasets, comprising 60 knowledge graphs with over 14M triples and 700k documents. This results in impressive performance and generalizability for GFM-RAG, making it the first graph foundation model applicable to unseen datasets for retrieval without any fine-tuning required. Extensive experiments on three multi-hop QA datasets and seven domain-specific RAG datasets demonstrate that GFM-RAG achieves state-of-the-art performance while maintaining efficiency and alignment with neural scaling laws, highlighting its potential for further improvement.
Graph-constrained Reasoning: Faithful Reasoning on Knowledge Graphs with Large Language Models
Oct 16, 2024



Large language models (LLMs) have demonstrated impressive reasoning abilities, but they still struggle with faithful reasoning due to knowledge gaps and hallucinations. To address these issues, knowledge graphs (KGs) have been utilized to enhance LLM reasoning through their structured knowledge. However, existing KG-enhanced methods, either retrieval-based or agent-based, encounter difficulties in accurately retrieving knowledge and efficiently traversing KGs at scale. In this work, we introduce graph-constrained reasoning (GCR), a novel framework that bridges structured knowledge in KGs with unstructured reasoning in LLMs. To eliminate hallucinations, GCR ensures faithful KG-grounded reasoning by integrating KG structure into the LLM decoding process through KG-Trie, a trie-based index that encodes KG reasoning paths. KG-Trie constrains the decoding process, allowing LLMs to directly reason on graphs and generate faithful reasoning paths grounded in KGs. Additionally, GCR leverages a lightweight KG-specialized LLM for graph-constrained reasoning alongside a powerful general LLM for inductive reasoning over multiple reasoning paths, resulting in accurate reasoning with zero reasoning hallucination. Extensive experiments on several KGQA benchmarks demonstrate that GCR achieves state-of-the-art performance and exhibits strong zero-shot generalizability to unseen KGs without additional training.
Graph Stochastic Neural Process for Inductive Few-shot Knowledge Graph Completion
Aug 03, 2024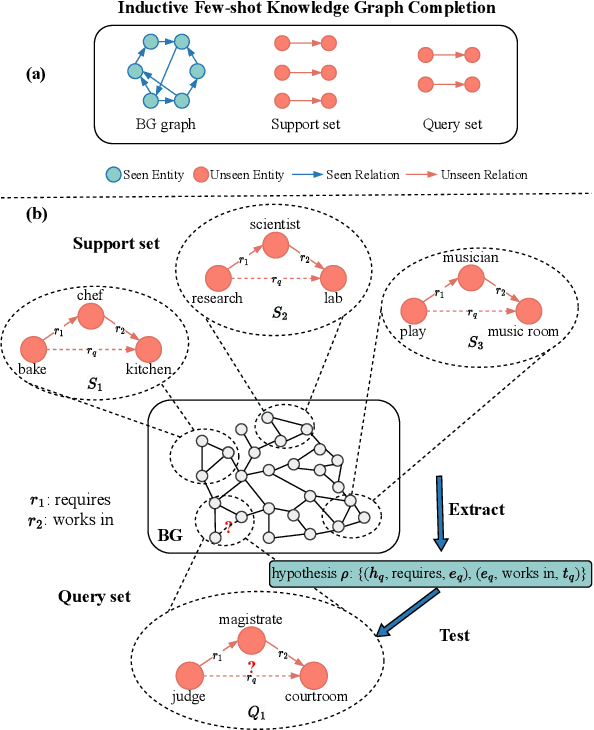
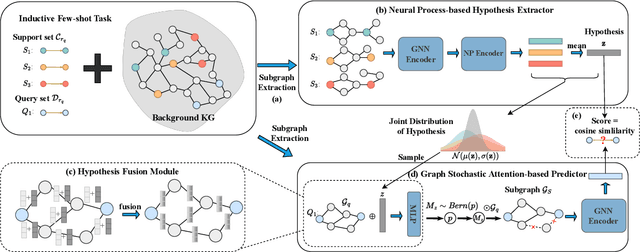
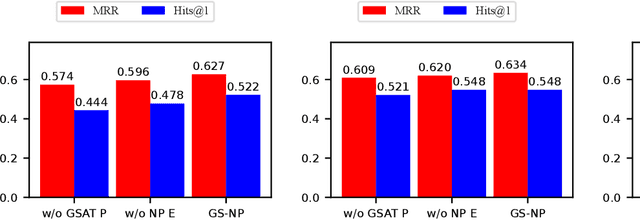
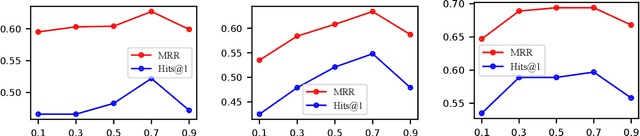
Knowledge graphs (KGs) store enormous facts as relationships between entities. Due to the long-tailed distribution of relations and the incompleteness of KGs, there is growing interest in few-shot knowledge graph completion (FKGC). Existing FKGC methods often assume the existence of all entities in KGs, which may not be practical since new relations and entities can emerge over time. Therefore, we focus on a more challenging task called inductive few-shot knowledge graph completion (I-FKGC), where both relations and entities during the test phase are unknown before. Inspired by the idea of inductive reasoning, we cast I-FKGC as an inductive reasoning problem. Specifically, we propose a novel Graph Stochastic Neural Process approach (GS-NP), which consists of two major modules. In the first module, to obtain a generalized hypothesis (e.g., shared subgraph), we present a neural process-based hypothesis extractor that models the joint distribution of hypothesis, from which we can sample a hypothesis for predictions. In the second module, based on the hypothesis, we propose a graph stochastic attention-based predictor to test if the triple in the query set aligns with the extracted hypothesis. Meanwhile, the predictor can generate an explanatory subgraph identified by the hypothesis. Finally, the training of these two modules is seamlessly combined into a unified objective function, of which the effectiveness is verified by theoretical analyses as well as empirical studies. Extensive experiments on three public datasets demonstrate that our method outperforms existing methods and derives new state-of-the-art performance.
Towards Few-shot Inductive Link Prediction on Knowledge Graphs: A Relational Anonymous Walk-guided Neural Process Approach
Jun 26, 2023



Few-shot inductive link prediction on knowledge graphs (KGs) aims to predict missing links for unseen entities with few-shot links observed. Previous methods are limited to transductive scenarios, where entities exist in the knowledge graphs, so they are unable to handle unseen entities. Therefore, recent inductive methods utilize the sub-graphs around unseen entities to obtain the semantics and predict links inductively. However, in the few-shot setting, the sub-graphs are often sparse and cannot provide meaningful inductive patterns. In this paper, we propose a novel relational anonymous walk-guided neural process for few-shot inductive link prediction on knowledge graphs, denoted as RawNP. Specifically, we develop a neural process-based method to model a flexible distribution over link prediction functions. This enables the model to quickly adapt to new entities and estimate the uncertainty when making predictions. To capture general inductive patterns, we present a relational anonymous walk to extract a series of relational motifs from few-shot observations. These motifs reveal the distinctive semantic patterns on KGs that support inductive predictions. Extensive experiments on typical benchmark datasets demonstrate that our model derives new state-of-the-art performance.