 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpistemic Context Learning: Building Trust the Right Way in LLM-Based Multi-Agent Systems
Jan 29, 2026Individual agents in multi-agent (MA) systems often lack robustness, tending to blindly conform to misleading peers. We show this weakness stems from both sycophancy and inadequate ability to evaluate peer reliability. To address this, we first formalize the learning problem of history-aware reference, introducing the historical interactions of peers as additional input, so that agents can estimate peer reliability and learn from trustworthy peers when uncertain. This shifts the task from evaluating peer reasoning quality to estimating peer reliability based on interaction history. We then develop Epistemic Context Learning (ECL): a reasoning framework that conditions predictions on explicitly-built peer profiles from history. We further optimize ECL by reinforcement learning using auxiliary rewards. Our experiments reveal that our ECL enables small models like Qwen 3-4B to outperform a history-agnostic baseline 8x its size (Qwen 3-30B) by accurately identifying reliable peers. ECL also boosts frontier models to near-perfect (100%) performance. We show that ECL generalizes well to various MA configurations and we find that trust is modeled well by LLMs, revealing a strong correlation in trust modeling accuracy and final answer quality.
MemRL: Self-Evolving Agents via Runtime Reinforcement Learning on Episodic Memory
Jan 06, 2026The hallmark of human intelligence is the ability to master new skills through Constructive Episodic Simulation-retrieving past experiences to synthesize solutions for novel tasks. While Large Language Models possess strong reasoning capabilities, they struggle to emulate this self-evolution: fine-tuning is computationally expensive and prone to catastrophic forgetting, while existing memory-based methods rely on passive semantic matching that often retrieves noise. To address these challenges, we propose MemRL, a framework that enables agents to self-evolve via non-parametric reinforcement learning on episodic memory. MemRL explicitly separates the stable reasoning of a frozen LLM from the plastic, evolving memory. Unlike traditional methods, MemRL employs a Two-Phase Retrieval mechanism that filters candidates by semantic relevance and then selects them based on learned Q-values (utility). These utilities are continuously refined via environmental feedback in an trial-and-error manner, allowing the agent to distinguish high-value strategies from similar noise. Extensive experiments on HLE, BigCodeBench, ALFWorld, and Lifelong Agent Bench demonstrate that MemRL significantly outperforms state-of-the-art baselines. Our analysis experiments confirm that MemRL effectively reconciles the stability-plasticity dilemma, enabling continuous runtime improvement without weight updates.
AntiLeak-Bench: Preventing Data Contamination by Automatically Constructing Benchmarks with Updated Real-World Knowledge
Dec 18, 2024



Data contamination hinders fair LLM evaluation by introducing test data into newer models' training sets. Existing studies solve this challenge by updating benchmarks with newly collected data. However, they fail to guarantee contamination-free evaluation as the newly collected data may contain pre-existing knowledge, and their benchmark updates rely on intensive human labor. To address these issues, we in this paper propose AntiLeak-Bench, an automated anti-leakage benchmarking framework. Instead of simply using newly collected data, we construct samples with explicitly new knowledge absent from LLMs' training sets, which thus ensures strictly contamination-free evaluation. We further design a fully automated workflow to build and update our benchmark without human labor. This significantly reduces the cost of benchmark maintenance to accommodate emerging LLMs. Through extensive experiments, we highlight that data contamination likely exists before LLMs' cutoff time and demonstrate AntiLeak-Bench effectively overcomes this challenge.
RuleArena: A Benchmark for Rule-Guided Reasoning with LLMs in Real-World Scenarios
Dec 12, 2024



This paper introduces RuleArena, a novel and challenging benchmark designed to evaluate the ability of large language models (LLMs) to follow complex, real-world rules in reasoning. Covering three practical domains -- airline baggage fees, NBA transactions, and tax regulations -- RuleArena assesses LLMs' proficiency in handling intricate natural language instructions that demand long-context understanding, logical reasoning, and accurate mathematical computation. Two key attributes distinguish RuleArena from traditional rule-based reasoning benchmarks: (1) it extends beyond standard first-order logic representations, and (2) it is grounded in authentic, practical scenarios, providing insights into the suitability and reliability of LLMs for real-world applications. Our findings reveal several notable limitations in LLMs: (1) they struggle to identify and apply the appropriate rules, frequently becoming confused by similar but distinct regulations, (2) they cannot consistently perform accurate mathematical computations, even when they correctly identify the relevant rules, and (3) in general, they perform poorly in the benchmark. These results highlight significant challenges in advancing LLMs' rule-guided reasoning capabilities in real-life applications.
Harnessing the power of longitudinal medical imaging for eye disease prognosis using Transformer-based sequence modeling
May 14, 2024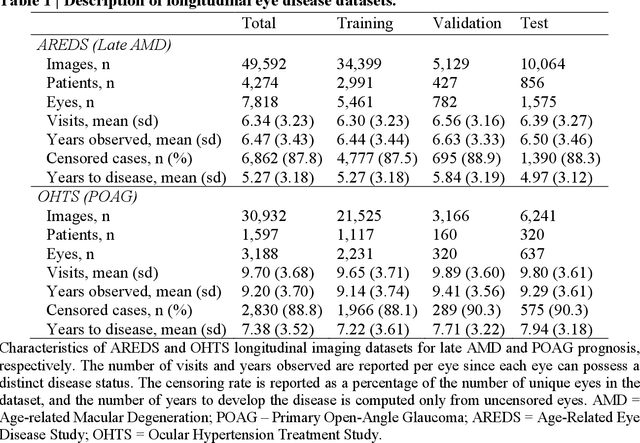
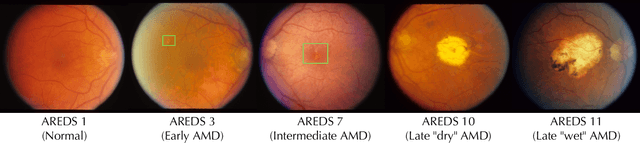
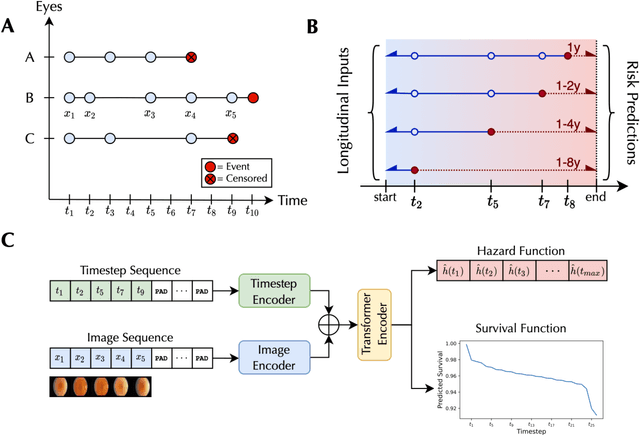
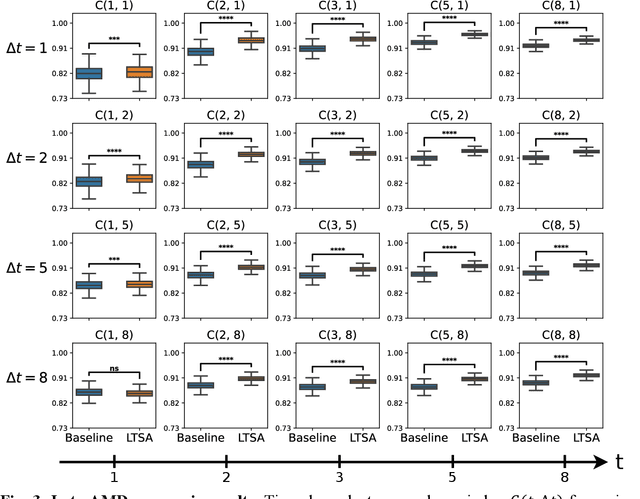
Deep learning has enabled breakthroughs in automated diagnosis from medical imaging, with many successful applications in ophthalmology. However, standard medical image classification approaches only assess disease presence at the time of acquisition, neglecting the common clinical setting of longitudinal imaging. For slow, progressive eye diseases like age-related macular degeneration (AMD) and primary open-angle glaucoma (POAG), patients undergo repeated imaging over time to track disease progression and forecasting the future risk of developing disease is critical to properly plan treatment. Our proposed Longitudinal Transformer for Survival Analysis (LTSA) enables dynamic disease prognosis from longitudinal medical imaging, modeling the time to disease from sequences of fundus photography images captured over long, irregular time periods. Using longitudinal imaging data from the Age-Related Eye Disease Study (AREDS) and Ocular Hypertension Treatment Study (OHTS), LTSA significantly outperformed a single-image baseline in 19/20 head-to-head comparisons on late AMD prognosis and 18/20 comparisons on POAG prognosis. A temporal attention analysis also suggested that, while the most recent image is typically the most influential, prior imaging still provides additional prognostic value.
TRAD: Enhancing LLM Agents with Step-Wise Thought Retrieval and Aligned Decision
Mar 10, 2024



Numerous large language model (LLM) agents have been built for different tasks like web navigation and online shopping due to LLM's wide knowledge and text-understanding ability. Among these works, many of them utilize in-context examples to achieve generalization without the need for fine-tuning, while few of them have considered the problem of how to select and effectively utilize these examples. Recently, methods based on trajectory-level retrieval with task meta-data and using trajectories as in-context examples have been proposed to improve the agent's overall performance in some sequential decision making tasks. However, these methods can be problematic due to plausible examples retrieved without task-specific state transition dynamics and long input with plenty of irrelevant context. In this paper, we propose a novel framework (TRAD) to address these issues. TRAD first conducts Thought Retrieval, achieving step-level demonstration selection via thought matching, leading to more helpful demonstrations and less irrelevant input noise. Then, TRAD introduces Aligned Decision, complementing retrieved demonstration steps with their previous or subsequent steps, which enables tolerance for imperfect thought and provides a choice for balance between more context and less noise. Extensive experiments on ALFWorld and Mind2Web benchmarks show that TRAD not only outperforms state-of-the-art models but also effectively helps in reducing noise and promoting generalization. Furthermore, TRAD has been deployed in real-world scenarios of a global business insurance company and improves the success rate of robotic process automation.
Is Risk-Sensitive Reinforcement Learning Properly Resolved?
Jul 02, 2023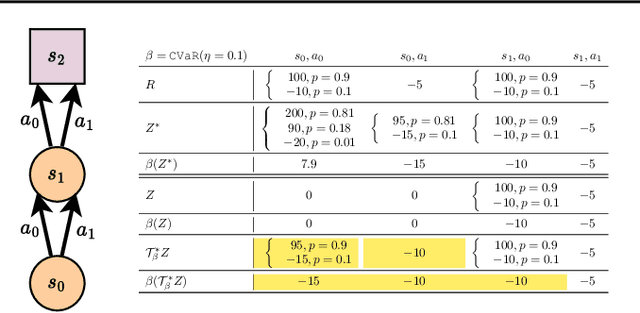
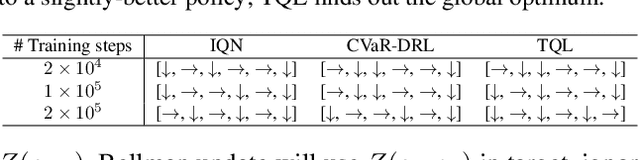
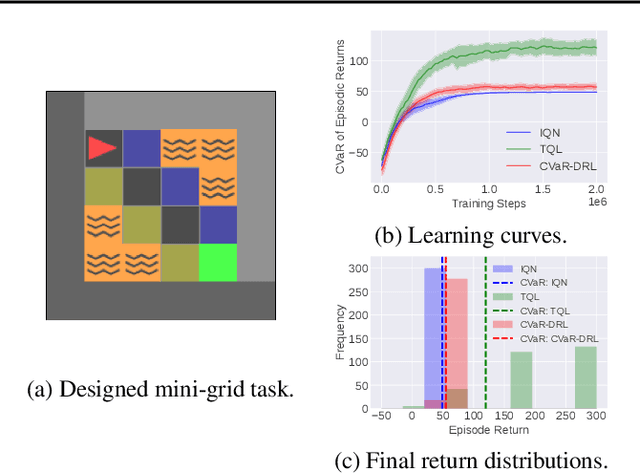
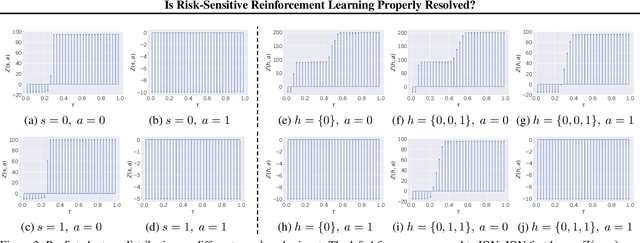
Due to the nature of risk management in learning applicable policies, risk-sensitive reinforcement learning (RSRL) has been realized as an important direction. RSRL is usually achieved by learning risk-sensitive objectives characterized by various risk measures, under the framework of distributional reinforcement learning. However, it remains unclear if the distributional Bellman operator properly optimizes the RSRL objective in the sense of risk measures. In this paper, we prove that the existing RSRL methods do not achieve unbiased optimization and can not guarantee optimality or even improvements regarding risk measures over accumulated return distributions. To remedy this issue, we further propose a novel algorithm, namely Trajectory Q-Learning (TQL), for RSRL problems with provable convergence to the optimal policy. Based on our new learning architecture, we are free to introduce a general and practical implementation for different risk measures to learn disparate risk-sensitive policies. In the experiments, we verify the learnability of our algorithm and show how our method effectively achieves better performances toward risk-sensitive objectives.
Learning Enhanced Representations for Tabular Data via Neighborhood Propagation
Jun 14, 2022

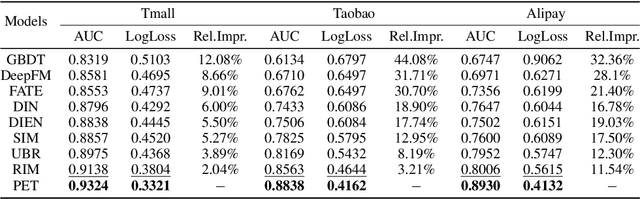
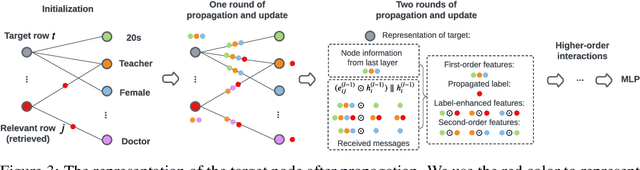
Prediction over tabular data is an essential and fundamental problem in many important downstream tasks. However, existing methods either take a data instance of the table independently as input or do not fully utilize the multi-rows features and labels to directly change and enhance the target data representations. In this paper, we propose to 1) construct a hypergraph from relevant data instance retrieval to model the cross-row and cross-column patterns of those instances, and 2) perform message Propagation to Enhance the target data instance representation for Tabular prediction tasks. Specifically, our specially-designed message propagation step benefits from 1) fusion of label and features during propagation, and 2) locality-aware high-order feature interactions. Experiments on two important tabular data prediction tasks validate the superiority of the proposed PET model against other baselines. Additionally, we demonstrate the effectiveness of the model components and the feature enhancement ability of PET via various ablation studies and visualizations. The code is included in https://github.com/KounianhuaDu/PET.