 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmark Dataset for Catalysis on 2D MXenes
May 30, 2026Merging first-principles calculations with machine learning (ML), we aim to accelerate the exploration of catalytic behaviour in novel materials. We focus on two-dimensional (2D) Ti$_2$CT$_y$ MXenes, whose versatile surface chemistry makes them particularly compelling candidates for catalysis. Resolving their composition and structure under realistic conditions exceeds the reach of standard density functional theory (DFT) due to computational cost. To address this challenge, we generate a comprehensive dataset of 50,000 DFT calculations for training and 10,000 for testing, encompassing both Ti$_2$CT$_y$ MXene configurations and molecular systems, along with an additional test dataset with 1000 genuinely new, larger systems to investigate how well models generalise. We train and validate widely used and competitive machine learning interatomic potential (MLIP) models, including EquiformerV2, MACE, MatRIS, and UPET, that accurately predict atomic forces and formation energies -- quantities that DFT must repeatedly compute for structural and catalytic investigations -- for these 2D materials. This combined DFT-ML framework achieves computational acceleration on the order of approximately $1-4 \cdot 10^3$ (on a CPU) while maintaining desired-level accuracy (approximately +/- $10$ meV/A for forces and approximately +/- $1$ meV for per-atom energies), paving the way for more efficient investigations of MXene catalytic behaviour. Moreover, we perform an extensive qualitative evaluation of the trained models, showcasing the importance of comprehensive simulation-based comparison beyond benchmark metrics. The dataset and the trained models with the code are available at https://huggingface.co/datasets/CatalystAnonymous/catalyst_mxenes.
Commutator-Induced Uncertainty in VAEs
May 22, 2026Variational autoencoders (VAEs) often struggle to represent non-commutative structure in learned latent spaces. Symmetry-aware VAEs commonly address this issue by enforcing commutativity through algebraic regularization, which is appropriate for commutative transformation groups but can suppress meaningful non-commutative structure when it is intrinsic to the data. We argue that non-commutativity should instead be explicitly diagnosed and reflected in reconstruction behavior. We introduce a Lie Group VAE framework that combines geometric and algebraic perspectives on uncertainty while separating discrete generative factors from continuous geometric transformations. In a first phase, the model is trained without structural constraints while algebraic non-commutativity is measured through finite Baker-Campbell-Hausdorff deviations and decoder order sensitivity is measured through reconstruction order-swap tests. These diagnostics reveal a scale mismatch between latent non-commutativity and reconstruction behavior under unconstrained training. In a second phase, we introduce a deformation-stability constraint with a data-driven calibration constant that aligns decoder sensitivity with algebraic non-commutativity. We evaluate the framework on dSprites, 3DShapes, 3DCars, and CelebA against generic and symmetry-aware baselines, including beta-VAE, CLG-VAE, and CFASL. Across synthetic benchmarks, the method improves reconstruction quality and yields decoder-level behavior more consistent with latent non-commutative structure. Qualitative analyses show clearer order-dependent latent compositions and more stable reconstructions. On CelebA, the model yields more faithful reconstructions and factor-specific latent traversals than CFASL, while also exhibiting meaningful order-dependent interactions between learned latent directions.
Generating Symmetric Materials using Latent Flow Matching
May 11, 2026Tackling the task of materials generation, we aim to enhance the previously proposed All-atom Diffusion Transformer (ADiT) by introducing SymADiT, a symmetry-aware variant. To do so, we use a representation of materials based on Wyckoff positions. We follow ADiT and perform generative modelling in latent space, adapted to our symmetry-aware representation. By forcing the output of the generative model to adhere to the symmetry restrictions imposed by the generated crystal's space group and each atom's Wyckoff-position, the generated materials exhibit more realistic symmetry properties. We benchmark our method against both symmetry-aware and symmetry-agnostic models for materials generation and show competitive performance, generating stable, symmetric materials with a simple Transformer architecture.
HMR-Net: Hierarchical Modular Routing for Cross-Domain Object Detection in Aerial Images
Apr 20, 2026Despite advances in object detection, aerial imagery remains a challenging domain, as models often fail to generalize across variations in spatial resolution, scene composition, and semantic label coverage. Differences in geographic context, sensor characteristics, and object distributions across datasets limit the capacity of conventional models to learn consistent and transferable representations. Shared methods trained on such data tend to impose a unified representation across fundamentally different domains, resulting in poor performance on region-specific content and less flexibility when dealing with novel object categories. To address this, we propose a novel modular learning framework that enables structured specialization in aerial detection. Our method introduces a hierarchical routing mechanism with two levels of modularity: a global expert assignment layer that uses latent geographic embeddings to route datasets to specialized processing modules, and a local scene decomposition mechanism that allocates image subregions to region-specific sub-modules. This allows our method to specialize across datasets and within complex scenes. Additionally, the framework contains a conditional expert module that uses external semantic information (e.g., category names or textual descriptions) to enable detection of novel object categories during inference, without the need for retraining or fine-tuning. By moving beyond monolithic representations, our method offers an adaptive framework for remote sensing object detection. Comprehensive evaluations on four datasets highlight improvements in multi-dataset generalization, regional specialization, and open-category detection.
LoMa: Local Feature Matching Revisited
Apr 06, 2026Local feature matching has long been a fundamental component of 3D vision systems such as Structure-from-Motion (SfM), yet progress has lagged behind the rapid advances of modern data-driven approaches. The newer approaches, such as feed-forward reconstruction models, have benefited extensively from scaling dataset sizes, whereas local feature matching models are still only trained on a few mid-sized datasets. In this paper, we revisit local feature matching from a data-driven perspective. In our approach, which we call LoMa, we combine large and diverse data mixtures, modern training recipes, scaled model capacity, and scaled compute, resulting in remarkable gains in performance. Since current standard benchmarks mainly rely on collecting sparse views from successful 3D reconstructions, the evaluation of progress in feature matching has been limited to relatively easy image pairs. To address the resulting saturation of benchmarks, we collect 1000 highly challenging image pairs from internet data into a new dataset called HardMatch. Ground truth correspondences for HardMatch are obtained via manual annotation by the authors. In our extensive benchmarking suite, we find that LoMa makes outstanding progress across the board, outperforming the state-of-the-art method ALIKED+LightGlue by +18.6 mAA on HardMatch, +29.5 mAA on WxBS, +21.4 (1m, 10$^\circ$) on InLoc, +24.2 AUC on RUBIK, and +12.4 mAA on IMC 2022. We release our code and models publicly at https://github.com/davnords/LoMa.
DisasterInsight: A Multimodal Benchmark for Function-Aware and Grounded Disaster Assessment
Jan 26, 2026Timely interpretation of satellite imagery is critical for disaster response, yet existing vision-language benchmarks for remote sensing largely focus on coarse labels and image-level recognition, overlooking the functional understanding and instruction robustness required in real humanitarian workflows. We introduce DisasterInsight, a multimodal benchmark designed to evaluate vision-language models (VLMs) on realistic disaster analysis tasks. DisasterInsight restructures the xBD dataset into approximately 112K building-centered instances and supports instruction-diverse evaluation across multiple tasks, including building-function classification, damage-level and disaster-type classification, counting, and structured report generation aligned with humanitarian assessment guidelines. To establish domain-adapted baselines, we propose DI-Chat, obtained by fine-tuning existing VLM backbones on disaster-specific instruction data using parameter-efficient Low-Rank Adaptation (LoRA). Extensive experiments on state-of-the-art generic and remote-sensing VLMs reveal substantial performance gaps across tasks, particularly in damage understanding and structured report generation. DI-Chat achieves significant improvements on damage-level and disaster-type classification as well as report generation quality, while building-function classification remains challenging for all evaluated models. DisasterInsight provides a unified benchmark for studying grounded multimodal reasoning in disaster imagery.
Out-of-Distribution Segmentation via Wasserstein-Based Evidential Uncertainty
Dec 12, 2025Deep neural networks achieve superior performance in semantic segmentation, but are limited to a predefined set of classes, which leads to failures when they encounter unknown objects in open-world scenarios. Recognizing and segmenting these out-of-distribution (OOD) objects is crucial for safety-critical applications such as automated driving. In this work, we present an evidence segmentation framework using a Wasserstein loss, which captures distributional distances while respecting the probability simplex geometry. Combined with Kullback-Leibler regularization and Dice structural consistency terms, our approach leads to improved OOD segmentation performance compared to uncertainty-based approaches.
VLM2GeoVec: Toward Universal Multimodal Embeddings for Remote Sensing
Dec 12, 2025Satellite imagery differs fundamentally from natural images: its aerial viewpoint, very high resolution, diverse scale variations, and abundance of small objects demand both region-level spatial reasoning and holistic scene understanding. Current remote-sensing approaches remain fragmented between dual-encoder retrieval models, which excel at large-scale cross-modal search but cannot interleave modalities, and generative assistants, which support region-level interpretation but lack scalable retrieval capabilities. We propose $\textbf{VLM2GeoVec}$, an instruction-following, single-encoder vision-language model trained contrastively to embed interleaved inputs (images, text, bounding boxes, and geographic coordinates) in a unified vector space. Our single encoder interleaves all inputs into one joint embedding trained with a contrastive loss, eliminating multi-stage pipelines and task-specific modules. To evaluate its versatility, we introduce $\textbf{RSMEB}$, a novel benchmark covering key remote-sensing embedding applications: scene classification; cross-modal search; compositional retrieval; visual-question answering; visual grounding and region-level reasoning; and semantic geospatial retrieval. On RSMEB, it achieves $\textbf{26.6%}$ P@1 on region-caption retrieval (+25 pp vs. dual-encoder baselines), $\textbf{32.5%}$ P@1 on referring-expression retrieval (+19 pp), and $\textbf{17.8%}$ P@1 on semantic geo-localization retrieval (over $3\times$ prior best), while matching or exceeding specialized baselines on conventional tasks such as scene classification and cross-modal retrieval. VLM2GeoVec unifies scalable retrieval with region-level spatial reasoning, enabling cohesive multimodal analysis in remote sensing. We will publicly release the code, checkpoints, and data upon acceptance.
RoMa v2: Harder Better Faster Denser Feature Matching
Nov 19, 2025Dense feature matching aims to estimate all correspondences between two images of a 3D scene and has recently been established as the gold-standard due to its high accuracy and robustness. However, existing dense matchers still fail or perform poorly for many hard real-world scenarios, and high-precision models are often slow, limiting their applicability. In this paper, we attack these weaknesses on a wide front through a series of systematic improvements that together yield a significantly better model. In particular, we construct a novel matching architecture and loss, which, combined with a curated diverse training distribution, enables our model to solve many complex matching tasks. We further make training faster through a decoupled two-stage matching-then-refinement pipeline, and at the same time, significantly reduce refinement memory usage through a custom CUDA kernel. Finally, we leverage the recent DINOv3 foundation model along with multiple other insights to make the model more robust and unbiased. In our extensive set of experiments we show that the resulting novel matcher sets a new state-of-the-art, being significantly more accurate than its predecessors. Code is available at https://github.com/Parskatt/romav2
R3D2: Realistic 3D Asset Insertion via Diffusion for Autonomous Driving Simulation
Jun 09, 2025

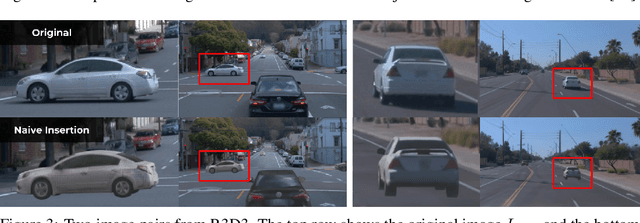

Validating autonomous driving (AD) systems requires diverse and safety-critical testing, making photorealistic virtual environments essential. Traditional simulation platforms, while controllable, are resource-intensive to scale and often suffer from a domain gap with real-world data. In contrast, neural reconstruction methods like 3D Gaussian Splatting (3DGS) offer a scalable solution for creating photorealistic digital twins of real-world driving scenes. However, they struggle with dynamic object manipulation and reusability as their per-scene optimization-based methodology tends to result in incomplete object models with integrated illumination effects. This paper introduces R3D2, a lightweight, one-step diffusion model designed to overcome these limitations and enable realistic insertion of complete 3D assets into existing scenes by generating plausible rendering effects-such as shadows and consistent lighting-in real time. This is achieved by training R3D2 on a novel dataset: 3DGS object assets are generated from in-the-wild AD data using an image-conditioned 3D generative model, and then synthetically placed into neural rendering-based virtual environments, allowing R3D2 to learn realistic integration. Quantitative and qualitative evaluations demonstrate that R3D2 significantly enhances the realism of inserted assets, enabling use-cases like text-to-3D asset insertion and cross-scene/dataset object transfer, allowing for true scalability in AD validation. To promote further research in scalable and realistic AD simulation, we will release our dataset and code, see https://research.zenseact.com/publications/R3D2/.