 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWho Handles Orientation? Investigating Invariance in Feature Matching
Apr 13, 2026Finding matching keypoints between images is a core problem in 3D computer vision. However, modern matchers struggle with large in-plane rotations. A straightforward mitigation is to learn rotation invariance via data augmentation. However, it remains unclear at which stage rotation invariance should be incorporated. In this paper, we study this in the context of a modern sparse matching pipeline. We perform extensive experiments by training on a large collection of 3D vision datasets and evaluating on popular image matching benchmarks. Surprisingly, we find that incorporating rotation invariance already in the descriptor yields similar performance to handling it in the matcher. However, rotation invariance is achieved earlier in the matcher when it is learned in the descriptor, allowing for a faster rotation-invariant matcher. Further, we find that enforcing rotation invariance does not hurt upright performance when trained at scale. Finally, we study the emergence of rotation invariance through scale and find that increasing the training data size substantially improves generalization to rotated images. We release two matchers robust to in-plane rotations that achieve state-of-the-art performance on e.g. multi-modal (WxBS), extreme (HardMatch), and satellite image matching (SatAst). Code is available at https://github.com/davnords/loma.
Weakly-Supervised Lung Nodule Segmentation via Training-Free Guidance of 3D Rectified Flow
Apr 09, 2026Dense annotations, such as segmentation masks, are expensive and time-consuming to obtain, especially for 3D medical images where expert voxel-wise labeling is required. Weakly supervised approaches aim to address this limitation, but often rely on attribution-based methods that struggle to accurately capture small structures such as lung nodules. In this paper, we propose a weakly-supervised segmentation method for lung nodules by combining pretrained state-of-the-art rectified flow and predictor models in a plug-and-play manner. Our approach uses training-free guidance of a 3D rectified flow model, requiring only fine-tuning of the predictor using image-level labels and no retraining of the generative model. The proposed method produces improved-quality segmentations for two separate predictors, consistently detecting lung nodules of varying size and shapes. Experiments on LUNA16 demonstrate improvements over baseline methods, highlighting the potential of generative foundation models as tools for weakly supervised 3D medical image segmentation.
LoMa: Local Feature Matching Revisited
Apr 06, 2026Local feature matching has long been a fundamental component of 3D vision systems such as Structure-from-Motion (SfM), yet progress has lagged behind the rapid advances of modern data-driven approaches. The newer approaches, such as feed-forward reconstruction models, have benefited extensively from scaling dataset sizes, whereas local feature matching models are still only trained on a few mid-sized datasets. In this paper, we revisit local feature matching from a data-driven perspective. In our approach, which we call LoMa, we combine large and diverse data mixtures, modern training recipes, scaled model capacity, and scaled compute, resulting in remarkable gains in performance. Since current standard benchmarks mainly rely on collecting sparse views from successful 3D reconstructions, the evaluation of progress in feature matching has been limited to relatively easy image pairs. To address the resulting saturation of benchmarks, we collect 1000 highly challenging image pairs from internet data into a new dataset called HardMatch. Ground truth correspondences for HardMatch are obtained via manual annotation by the authors. In our extensive benchmarking suite, we find that LoMa makes outstanding progress across the board, outperforming the state-of-the-art method ALIKED+LightGlue by +18.6 mAA on HardMatch, +29.5 mAA on WxBS, +21.4 (1m, 10$^\circ$) on InLoc, +24.2 AUC on RUBIK, and +12.4 mAA on IMC 2022. We release our code and models publicly at https://github.com/davnords/LoMa.
ARTA: Adaptive Mixed-Resolution Token Allocation for Efficient Dense Feature Extraction
Mar 27, 2026We present ARTA, a mixed-resolution coarse-to-fine vision transformer for efficient dense feature extraction. Unlike models that begin with dense high-resolution (fine) tokens, ARTA starts with low-resolution (coarse) tokens and uses a lightweight allocator to predict which regions require more fine tokens. The allocator iteratively predicts a semantic (class) boundary score and allocates additional tokens to patches above a low threshold, concentrating token density near boundaries while maintaining high sensitivity to weak boundary evidence. This targeted allocation encourages tokens to represent a single semantic class rather than a mixture of classes. Mixed-resolution attention enables interaction between coarse and fine tokens, focusing computation on semantically complex areas while avoiding redundant processing in homogeneous regions. Experiments demonstrate that ARTA achieves state-of-the-art results on ADE20K and COCO-Stuff with substantially fewer FLOPs, and delivers competitive performance on Cityscapes at markedly lower compute. For example, ARTA-Base attains 54.6 mIoU on ADE20K in the ~100M-parameter class while using fewer FLOPs and less memory than comparable backbones.
Semi-Supervised Hierarchical Open-Set Classification
Jan 23, 2026Hierarchical open-set classification handles previously unseen classes by assigning them to the most appropriate high-level category in a class taxonomy. We extend this paradigm to the semi-supervised setting, enabling the use of large-scale, uncurated datasets containing a mixture of known and unknown classes to improve the hierarchical open-set performance. To this end, we propose a teacher-student framework based on pseudo-labeling. Two key components are introduced: 1) subtree pseudo-labels, which provide reliable supervision in the presence of unknown data, and 2) age-gating, a mechanism that mitigates overconfidence in pseudo-labels. Experiments show that our framework outperforms self-supervised pretraining followed by supervised adaptation, and even matches the fully supervised counterpart when using only 20 labeled samples per class on the iNaturalist19 benchmark. Our code is available at https://github.com/walline/semihoc.
RoMa v2: Harder Better Faster Denser Feature Matching
Nov 19, 2025Dense feature matching aims to estimate all correspondences between two images of a 3D scene and has recently been established as the gold-standard due to its high accuracy and robustness. However, existing dense matchers still fail or perform poorly for many hard real-world scenarios, and high-precision models are often slow, limiting their applicability. In this paper, we attack these weaknesses on a wide front through a series of systematic improvements that together yield a significantly better model. In particular, we construct a novel matching architecture and loss, which, combined with a curated diverse training distribution, enables our model to solve many complex matching tasks. We further make training faster through a decoupled two-stage matching-then-refinement pipeline, and at the same time, significantly reduce refinement memory usage through a custom CUDA kernel. Finally, we leverage the recent DINOv3 foundation model along with multiple other insights to make the model more robust and unbiased. In our extensive set of experiments we show that the resulting novel matcher sets a new state-of-the-art, being significantly more accurate than its predecessors. Code is available at https://github.com/Parskatt/romav2
R3D2: Realistic 3D Asset Insertion via Diffusion for Autonomous Driving Simulation
Jun 09, 2025

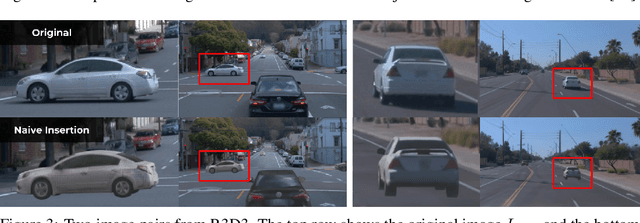

Validating autonomous driving (AD) systems requires diverse and safety-critical testing, making photorealistic virtual environments essential. Traditional simulation platforms, while controllable, are resource-intensive to scale and often suffer from a domain gap with real-world data. In contrast, neural reconstruction methods like 3D Gaussian Splatting (3DGS) offer a scalable solution for creating photorealistic digital twins of real-world driving scenes. However, they struggle with dynamic object manipulation and reusability as their per-scene optimization-based methodology tends to result in incomplete object models with integrated illumination effects. This paper introduces R3D2, a lightweight, one-step diffusion model designed to overcome these limitations and enable realistic insertion of complete 3D assets into existing scenes by generating plausible rendering effects-such as shadows and consistent lighting-in real time. This is achieved by training R3D2 on a novel dataset: 3DGS object assets are generated from in-the-wild AD data using an image-conditioned 3D generative model, and then synthetically placed into neural rendering-based virtual environments, allowing R3D2 to learn realistic integration. Quantitative and qualitative evaluations demonstrate that R3D2 significantly enhances the realism of inserted assets, enabling use-cases like text-to-3D asset insertion and cross-scene/dataset object transfer, allowing for true scalability in AD validation. To promote further research in scalable and realistic AD simulation, we will release our dataset and code, see https://research.zenseact.com/publications/R3D2/.
Stronger ViTs With Octic Equivariance
May 21, 2025Recent efforts at scaling computer vision models have established Vision Transformers (ViTs) as the leading architecture. ViTs incorporate weight sharing over image patches as an important inductive bias. In this work, we show that ViTs benefit from incorporating equivariance under the octic group, i.e., reflections and 90-degree rotations, as a further inductive bias. We develop new architectures, octic ViTs, that use octic-equivariant layers and put them to the test on both supervised and self-supervised learning. Through extensive experiments on DeiT-III and DINOv2 training on ImageNet-1K, we show that octic ViTs yield more computationally efficient networks while also improving performance. In particular, we achieve approximately 40% reduction in FLOPs for ViT-H while simultaneously improving both classification and segmentation results.
Addressing degeneracies in latent interpolation for diffusion models
May 12, 2025There is an increasing interest in using image-generating diffusion models for deep data augmentation and image morphing. In this context, it is useful to interpolate between latents produced by inverting a set of input images, in order to generate new images representing some mixture of the inputs. We observe that such interpolation can easily lead to degenerate results when the number of inputs is large. We analyze the cause of this effect theoretically and experimentally, and suggest a suitable remedy. The suggested approach is a relatively simple normalization scheme that is easy to use whenever interpolation between latents is needed. We measure image quality using FID and CLIP embedding distance and show experimentally that baseline interpolation methods lead to a drop in quality metrics long before the degeneration issue is clearly visible. In contrast, our method significantly reduces the degeneration effect and leads to improved quality metrics also in non-degenerate situations.
Geometric Consistency Refinement for Single Image Novel View Synthesis via Test-Time Adaptation of Diffusion Models
Apr 11, 2025Diffusion models for single image novel view synthesis (NVS) can generate highly realistic and plausible images, but they are limited in the geometric consistency to the given relative poses. The generated images often show significant errors with respect to the epipolar constraints that should be fulfilled, as given by the target pose. In this paper we address this issue by proposing a methodology to improve the geometric correctness of images generated by a diffusion model for single image NVS. We formulate a loss function based on image matching and epipolar constraints, and optimize the starting noise in a diffusion sampling process such that the generated image should both be a realistic image and fulfill geometric constraints derived from the given target pose. Our method does not require training data or fine-tuning of the diffusion models, and we show that we can apply it to multiple state-of-the-art models for single image NVS. The method is evaluated on the MegaScenes dataset and we show that geometric consistency is improved compared to the baseline models while retaining the quality of the generated images.