 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Supervised Hierarchical Open-Set Classification
Jan 23, 2026Hierarchical open-set classification handles previously unseen classes by assigning them to the most appropriate high-level category in a class taxonomy. We extend this paradigm to the semi-supervised setting, enabling the use of large-scale, uncurated datasets containing a mixture of known and unknown classes to improve the hierarchical open-set performance. To this end, we propose a teacher-student framework based on pseudo-labeling. Two key components are introduced: 1) subtree pseudo-labels, which provide reliable supervision in the presence of unknown data, and 2) age-gating, a mechanism that mitigates overconfidence in pseudo-labels. Experiments show that our framework outperforms self-supervised pretraining followed by supervised adaptation, and even matches the fully supervised counterpart when using only 20 labeled samples per class on the iNaturalist19 benchmark. Our code is available at https://github.com/walline/semihoc.
ProHOC: Probabilistic Hierarchical Out-of-Distribution Classification via Multi-Depth Networks
Mar 27, 2025Out-of-distribution (OOD) detection in deep learning has traditionally been framed as a binary task, where samples are either classified as belonging to the known classes or marked as OOD, with little attention given to the semantic relationships between OOD samples and the in-distribution (ID) classes. We propose a framework for detecting and classifying OOD samples in a given class hierarchy. Specifically, we aim to predict OOD data to their correct internal nodes of the class hierarchy, whereas the known ID classes should be predicted as their corresponding leaf nodes. Our approach leverages the class hierarchy to create a probabilistic model and we implement this model by using networks trained for ID classification at multiple hierarchy depths. We conduct experiments on three datasets with predefined class hierarchies and show the effectiveness of our method. Our code is available at https://github.com/walline/prohoc.
Exploring Semi-Supervised Learning for Online Mapping
Oct 14, 2024Online mapping is important for scaling autonomous driving beyond well-defined areas. Training a model to produce a local map, including lane markers, road edges, and pedestrian crossings using only onboard sensory information, traditionally requires extensive labelled data, which is difficult and costly to obtain. This paper draws inspiration from semi-supervised learning techniques in other domains, demonstrating their applicability to online mapping. Additionally, we propose a simple yet effective method to exploit inherent attributes of online mapping to further enhance performance by fusing the teacher's pseudo-labels from multiple samples. The performance gap to using all labels is reduced from 29.6 to 3.4 mIoU on Argoverse, and from 12 to 3.4 mIoU on NuScenes utilising only 10% of the labelled data. We also demonstrate strong performance in extrapolating to new cities outside those in the training data. Specifically, for challenging nuScenes, adapting from Boston to Singapore, performance increases by 6.6 mIoU when unlabelled data from Singapore is included in training.
ProSub: Probabilistic Open-Set Semi-Supervised Learning with Subspace-Based Out-of-Distribution Detection
Jul 16, 2024In open-set semi-supervised learning (OSSL), we consider unlabeled datasets that may contain unknown classes. Existing OSSL methods often use the softmax confidence for classifying data as in-distribution (ID) or out-of-distribution (OOD). Additionally, many works for OSSL rely on ad-hoc thresholds for ID/OOD classification, without considering the statistics of the problem. We propose a new score for ID/OOD classification based on angles in feature space between data and an ID subspace. Moreover, we propose an approach to estimate the conditional distributions of scores given ID or OOD data, enabling probabilistic predictions of data being ID or OOD. These components are put together in a framework for OSSL, termed \emph{ProSub}, that is experimentally shown to reach SOTA performance on several benchmark problems. Our code is available at https://github.com/walline/prosub.
Synthesizing multi-log grasp poses
Mar 18, 2024Multi-object grasping is a challenging task. It is important for energy and cost-efficient operation of industrial crane manipulators, such as those used to collect tree logs off the forest floor and onto forest machines. In this work, we used synthetic data from physics simulations to explore how data-driven modeling can be used to infer multi-object grasp poses from images. We showed that convolutional neural networks can be trained specifically for synthesizing multi-object grasps. Using RGB-Depth images and instance segmentation masks as input, a U-Net model outputs grasp maps with corresponding grapple orientation and opening width. Given an observation of a pile of logs, the model can be used to synthesize and rate the possible grasp poses and select the most suitable one, with the possibility to respect changing operational constraints such as lift capacity and reach. When tested on previously unseen data, the proposed model found successful grasp poses with an accuracy of 95%.
Multi-log grasping using reinforcement learning and virtual visual servoing
Sep 06, 2023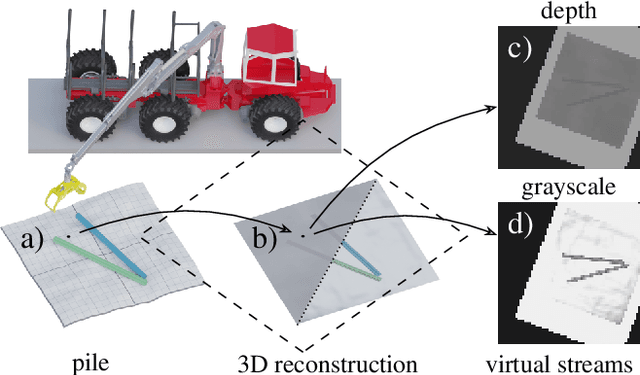
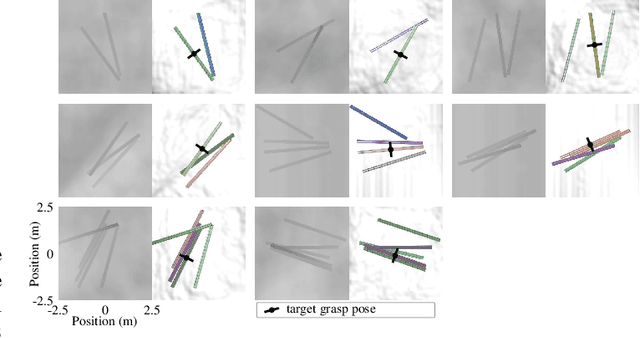
We explore multi-log grasping using reinforcement learning and virtual visual servoing for automated forwarding. Automation of forest processes is a major challenge, and many techniques regarding robot control pose different challenges due to the unstructured and harsh outdoor environment. Grasping multiple logs involves problems of dynamics and path planning, where the interaction between the grapple, logs, terrain, and obstacles requires visual information. To address these challenges, we separate image segmentation from crane control and utilize a virtual camera to provide an image stream from 3D reconstructed data. We use Cartesian control to simplify domain transfer. Since log piles are static, visual servoing using a 3D reconstruction of the pile and its surroundings is equivalent to using real camera data until the point of grasping. This relaxes the limit on computational resources and time for the challenge of image segmentation, and allows for collecting data in situations where the log piles are not occluded. The disadvantage is the lack of information during grasping. We demonstrate that this problem is manageable and present an agent that is 95% successful in picking one or several logs from challenging piles of 2--5 logs.
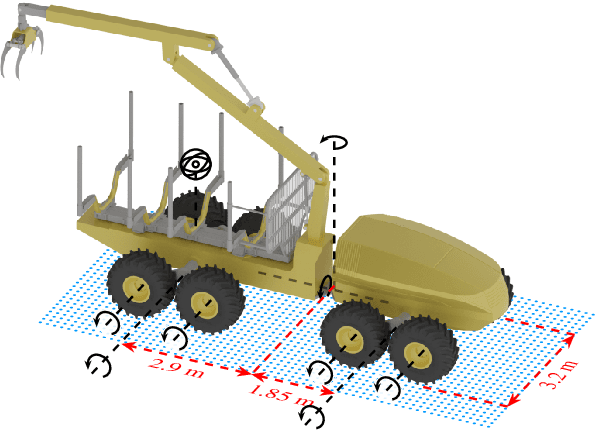
Sim-to-real transfer of active suspension control using deep reinforcement learning
Jun 21, 2023
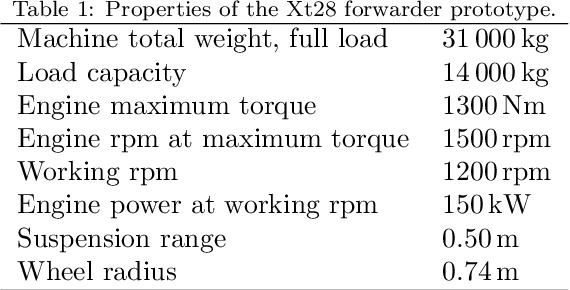
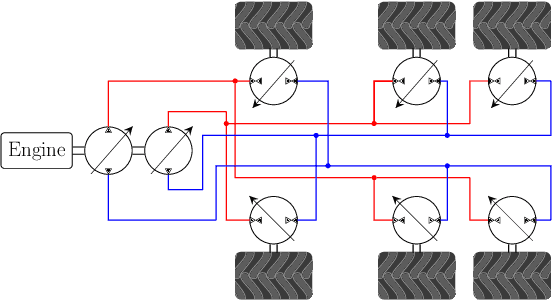
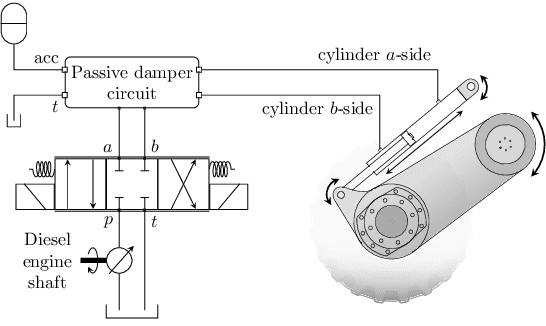
We explore sim-to-real transfer of deep reinforcement learning controllers for a heavy vehicle with active suspensions designed for traversing rough terrain. While related research primarily focuses on lightweight robots with electric motors and fast actuation, this study uses a forestry vehicle with a complex hydraulic driveline and slow actuation. We simulate the vehicle using multibody dynamics and apply system identification to find an appropriate set of simulation parameters. We then train policies in simulation using various techniques to mitigate the sim-to-real gap, including domain randomization, action delays, and a reward penalty to encourage smooth control. In reality, the policies trained with action delays and a penalty for erratic actions perform at nearly the same level as in simulation. In experiments on level ground, the motion trajectories closely overlap when turning to either side, as well as in a route tracking scenario. When faced with a ramp that requires active use of the suspensions, the simulated and real motions are in close alignment. This shows that the actuator model together with system identification yields a sufficiently accurate model of the actuators. We observe that policies trained without the additional action penalty exhibit fast switching or bang-bang control. These present smooth motions and high performance in simulation but transfer poorly to reality. We find that policies make marginal use of the local height map for perception, showing no indications of look-ahead planning. However, the strong transfer capabilities entail that further development concerning perception and performance can be largely confined to simulation.
Improving Open-Set Semi-Supervised Learning with Self-Supervision
Jan 24, 2023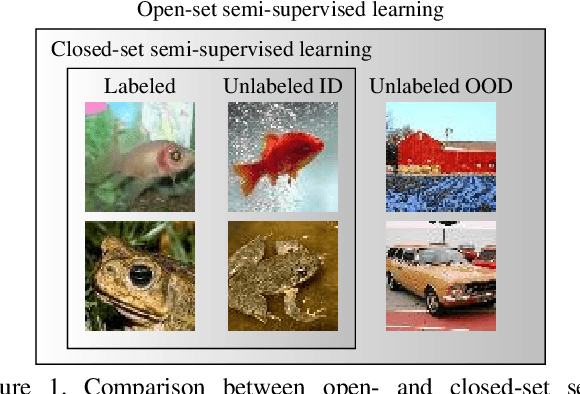
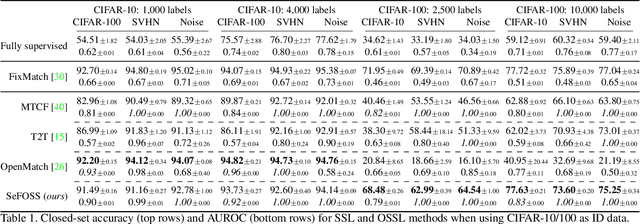
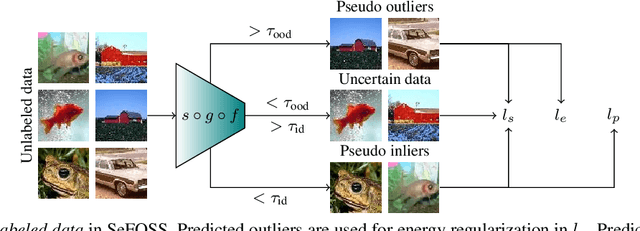
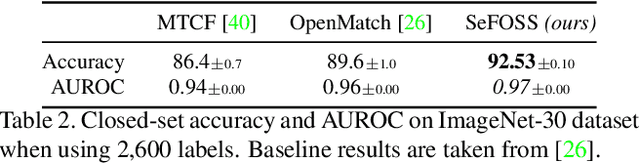
Open-set semi-supervised learning (OSSL) is a realistic setting of semi-supervised learning where the unlabeled training set contains classes that are not present in the labeled set. Many existing OSSL methods assume that these out-of-distribution data are harmful and put effort into excluding data from unknown classes from the training objective. In contrast, we propose an OSSL framework that facilitates learning from all unlabeled data through self-supervision. Additionally, we utilize an energy-based score to accurately recognize data belonging to the known classes, making our method well-suited for handling uncurated data in deployment. We show through extensive experimental evaluations on several datasets that our method shows overall unmatched robustness and performance in terms of closed-set accuracy and open-set recognition compared with state-of-the-art for OSSL. Our code will be released upon publication.
DoubleMatch: Improving Semi-Supervised Learning with Self-Supervision
May 11, 2022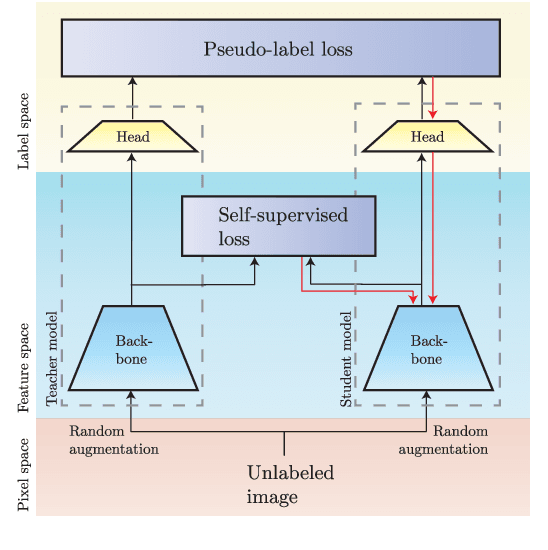
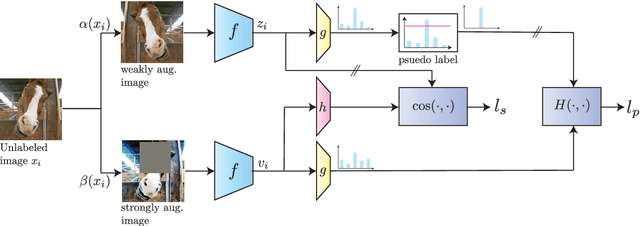
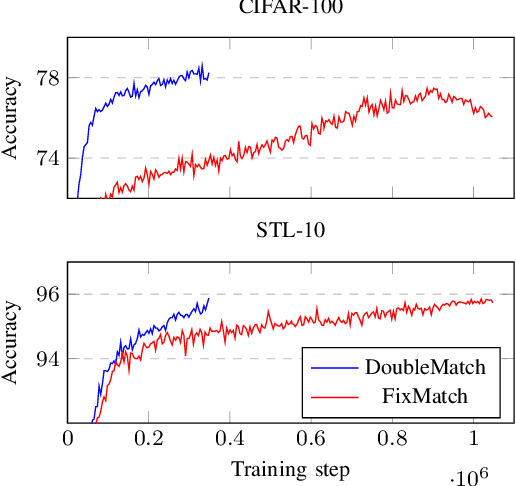
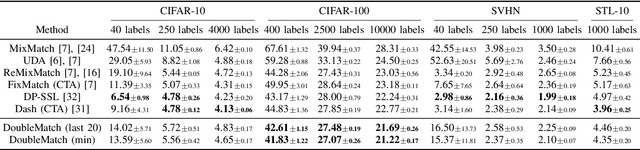
Following the success of supervised learning, semi-supervised learning (SSL) is now becoming increasingly popular. SSL is a family of methods, which in addition to a labeled training set, also use a sizable collection of unlabeled data for fitting a model. Most of the recent successful SSL methods are based on pseudo-labeling approaches: letting confident model predictions act as training labels. While these methods have shown impressive results on many benchmark datasets, a drawback of this approach is that not all unlabeled data are used during training. We propose a new SSL algorithm, DoubleMatch, which combines the pseudo-labeling technique with a self-supervised loss, enabling the model to utilize all unlabeled data in the training process. We show that this method achieves state-of-the-art accuracies on multiple benchmark datasets while also reducing training times compared to existing SSL methods. Code is available at https://github.com/walline/doublematch.
Learning multiobjective rough terrain traversability
Apr 13, 2022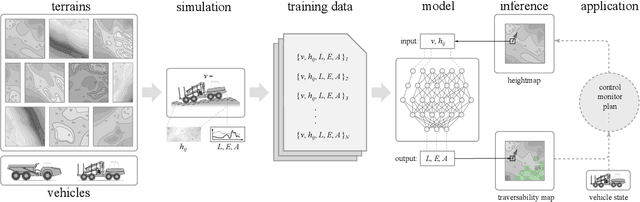
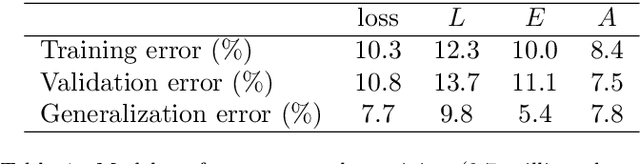
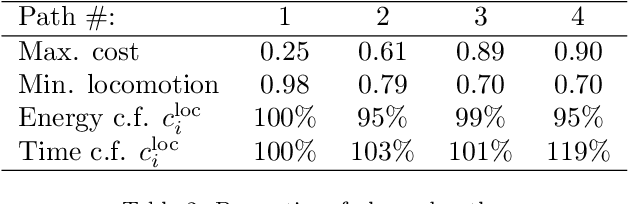
We present a method that uses high-resolution topography data of rough terrain, and ground vehicle simulation, to predict traversability. Traversability is expressed as three independent measures: the ability to traverse the terrain at a target speed, energy consumption, and acceleration. The measures are continuous and reflect different objectives for planning that go beyond binary classification. A deep neural network is trained to predict the traversability measures from the local heightmap and target speed. To produce training data, we use an articulated vehicle with wheeled bogie suspensions and procedurally generated terrains. We evaluate the model on laser-scanned forest terrains, previously unseen by the model. The model predicts traversability with an accuracy of 90%. Predictions rely on features from the high-dimensional terrain data that surpass local roughness and slope relative to the heading. Correlations show that the three traversability measures are complementary to each other. With an inference speed 3000 times faster than the ground truth simulation and trivially parallelizable, the model is well suited for traversability analysis and optimal path planning over large areas.