 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning multiobjective rough terrain traversability
Paper and Code
Apr 13, 2022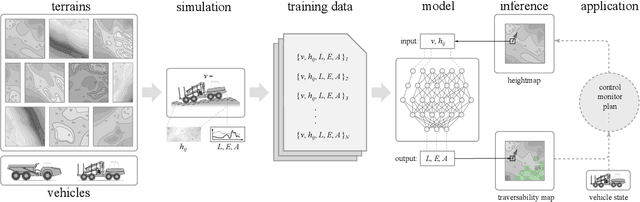
We present a method that uses high-resolution topography data of rough terrain, and ground vehicle simulation, to predict traversability. Traversability is expressed as three independent measures: the ability to traverse the terrain at a target speed, energy consumption, and acceleration. The measures are continuous and reflect different objectives for planning that go beyond binary classification. A deep neural network is trained to predict the traversability measures from the local heightmap and target speed. To produce training data, we use an articulated vehicle with wheeled bogie suspensions and procedurally generated terrains. We evaluate the model on laser-scanned forest terrains, previously unseen by the model. The model predicts traversability with an accuracy of 90%. Predictions rely on features from the high-dimensional terrain data that surpass local roughness and slope relative to the heading. Correlations show that the three traversability measures are complementary to each other. With an inference speed 3000 times faster than the ground truth simulation and trivially parallelizable, the model is well suited for traversability analysis and optimal path planning over large areas.