 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety filtering of robotic manipulation under environment uncertainty: a computational approach
Sep 16, 2025Robotic manipulation in dynamic and unstructured environments requires safety mechanisms that exploit what is known and what is uncertain about the world. Existing safety filters often assume full observability, limiting their applicability in real-world tasks. We propose a physics-based safety filtering scheme that leverages high-fidelity simulation to assess control policies under uncertainty in world parameters. The method combines dense rollout with nominal parameters and parallelizable sparse re-evaluation at critical state-transitions, quantified through generalized factors of safety for stable grasping and actuator limits, and targeted uncertainty reduction through probing actions. We demonstrate the approach in a simulated bimanual manipulation task with uncertain object mass and friction, showing that unsafe trajectories can be identified and filtered efficiently. Our results highlight physics-based sparse safety evaluation as a scalable strategy for safe robotic manipulation under uncertainty.
Multi-log grasping using reinforcement learning and virtual visual servoing
Sep 06, 2023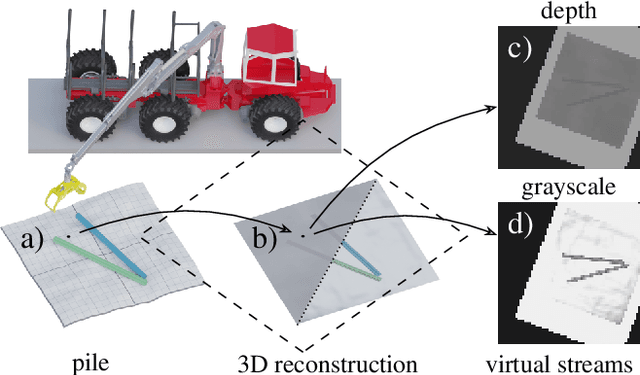
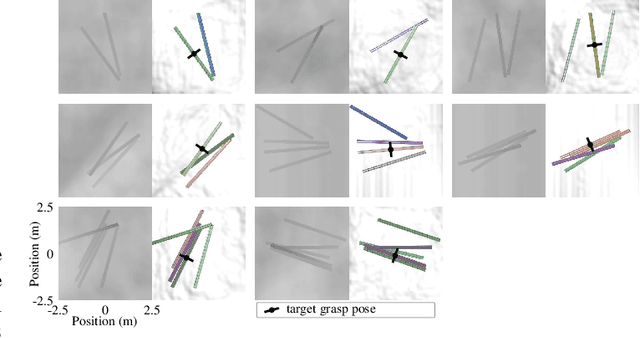
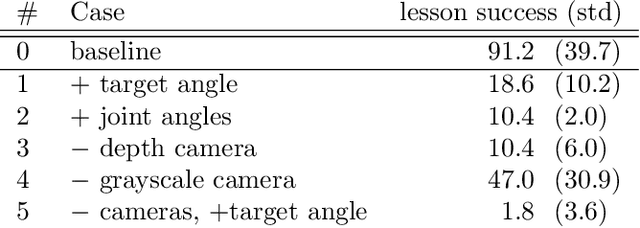
We explore multi-log grasping using reinforcement learning and virtual visual servoing for automated forwarding. Automation of forest processes is a major challenge, and many techniques regarding robot control pose different challenges due to the unstructured and harsh outdoor environment. Grasping multiple logs involves problems of dynamics and path planning, where the interaction between the grapple, logs, terrain, and obstacles requires visual information. To address these challenges, we separate image segmentation from crane control and utilize a virtual camera to provide an image stream from 3D reconstructed data. We use Cartesian control to simplify domain transfer. Since log piles are static, visual servoing using a 3D reconstruction of the pile and its surroundings is equivalent to using real camera data until the point of grasping. This relaxes the limit on computational resources and time for the challenge of image segmentation, and allows for collecting data in situations where the log piles are not occluded. The disadvantage is the lack of information during grasping. We demonstrate that this problem is manageable and present an agent that is 95% successful in picking one or several logs from challenging piles of 2--5 logs.
Sim-to-real transfer of active suspension control using deep reinforcement learning
Jun 21, 2023
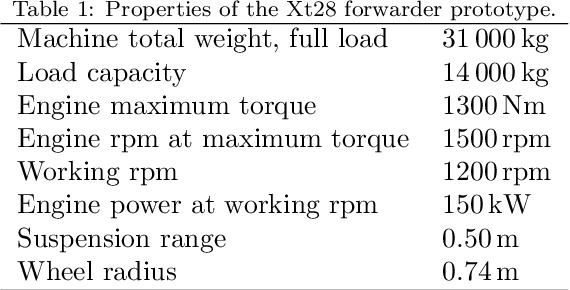
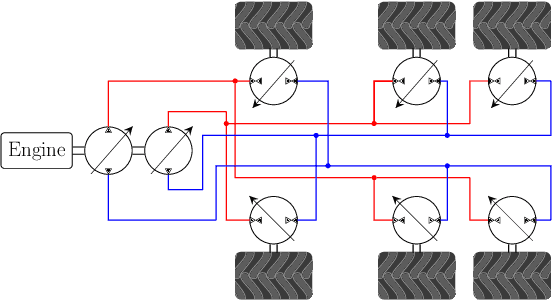
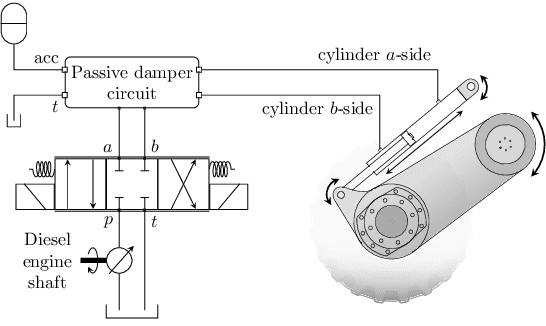
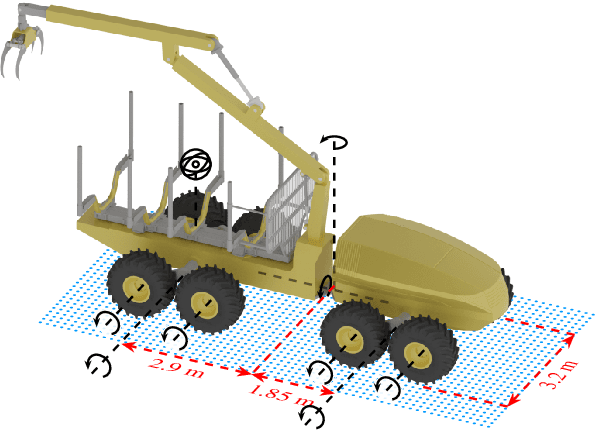
We explore sim-to-real transfer of deep reinforcement learning controllers for a heavy vehicle with active suspensions designed for traversing rough terrain. While related research primarily focuses on lightweight robots with electric motors and fast actuation, this study uses a forestry vehicle with a complex hydraulic driveline and slow actuation. We simulate the vehicle using multibody dynamics and apply system identification to find an appropriate set of simulation parameters. We then train policies in simulation using various techniques to mitigate the sim-to-real gap, including domain randomization, action delays, and a reward penalty to encourage smooth control. In reality, the policies trained with action delays and a penalty for erratic actions perform at nearly the same level as in simulation. In experiments on level ground, the motion trajectories closely overlap when turning to either side, as well as in a route tracking scenario. When faced with a ramp that requires active use of the suspensions, the simulated and real motions are in close alignment. This shows that the actuator model together with system identification yields a sufficiently accurate model of the actuators. We observe that policies trained without the additional action penalty exhibit fast switching or bang-bang control. These present smooth motions and high performance in simulation but transfer poorly to reality. We find that policies make marginal use of the local height map for perception, showing no indications of look-ahead planning. However, the strong transfer capabilities entail that further development concerning perception and performance can be largely confined to simulation.
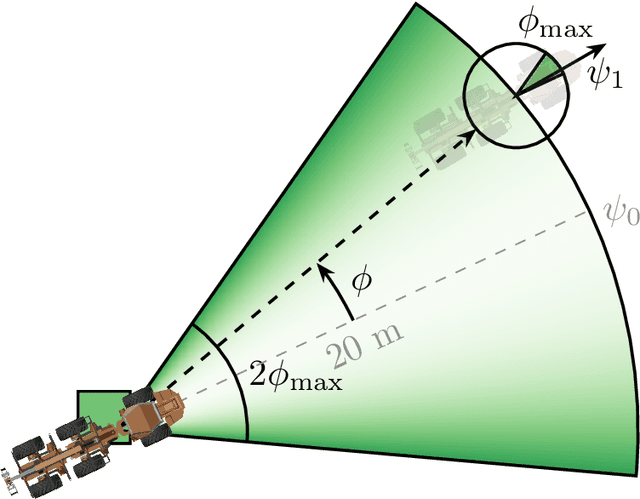
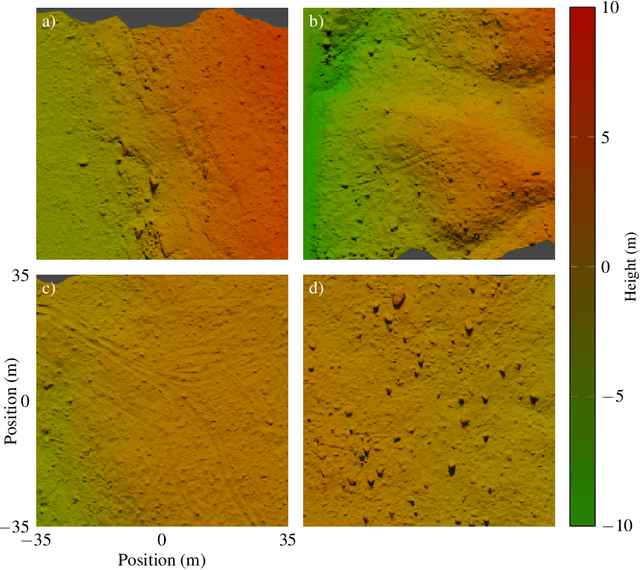
Learning multiobjective rough terrain traversability
Apr 13, 2022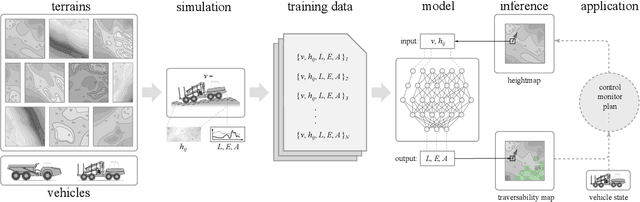
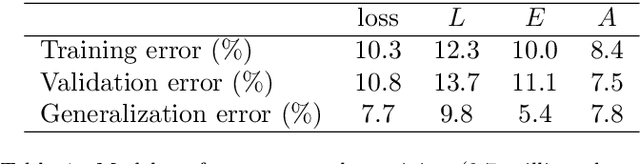
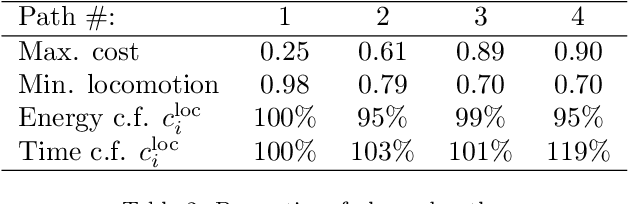
We present a method that uses high-resolution topography data of rough terrain, and ground vehicle simulation, to predict traversability. Traversability is expressed as three independent measures: the ability to traverse the terrain at a target speed, energy consumption, and acceleration. The measures are continuous and reflect different objectives for planning that go beyond binary classification. A deep neural network is trained to predict the traversability measures from the local heightmap and target speed. To produce training data, we use an articulated vehicle with wheeled bogie suspensions and procedurally generated terrains. We evaluate the model on laser-scanned forest terrains, previously unseen by the model. The model predicts traversability with an accuracy of 90%. Predictions rely on features from the high-dimensional terrain data that surpass local roughness and slope relative to the heading. Correlations show that the three traversability measures are complementary to each other. With an inference speed 3000 times faster than the ground truth simulation and trivially parallelizable, the model is well suited for traversability analysis and optimal path planning over large areas.
Control of rough terrain vehicles using deep reinforcement learning
Jul 05, 2021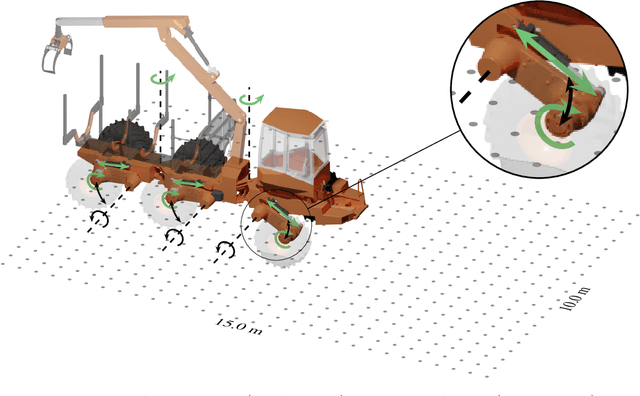
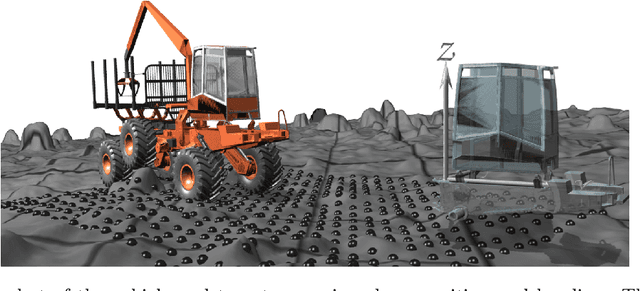
We explore the potential to control terrain vehicles using deep reinforcement in scenarios where human operators and traditional control methods are inadequate. This letter presents a controller that perceives, plans, and successfully controls a 16-tonne forestry vehicle with two frame articulation joints, six wheels, and their actively articulated suspensions to traverse rough terrain. The carefully shaped reward signal promotes safe, environmental, and efficient driving, which leads to the emergence of unprecedented driving skills. We test learned skills in a virtual environment, including terrains reconstructed from high-density laser scans of forest sites. The controller displays the ability to handle obstructing obstacles, slopes up to 27$^\circ$, and a variety of natural terrains, all with limited wheel slip, smooth, and upright traversal with intelligent use of the active suspensions. The results confirm that deep reinforcement learning has the potential to enhance control of vehicles with complex dynamics and high-dimensional observation data compared to human operators or traditional control methods, especially in rough terrain.