 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of rough terrain vehicles using deep reinforcement learning
Jul 05, 2021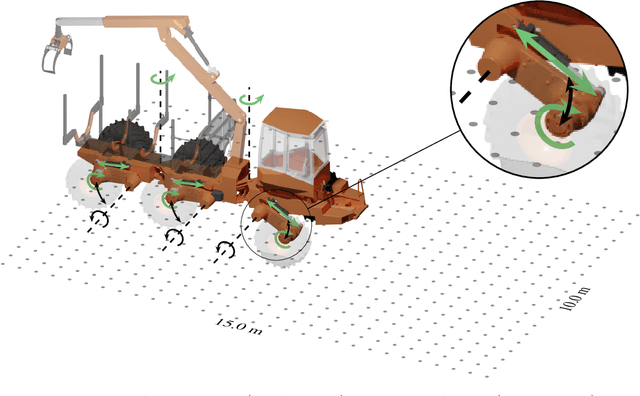
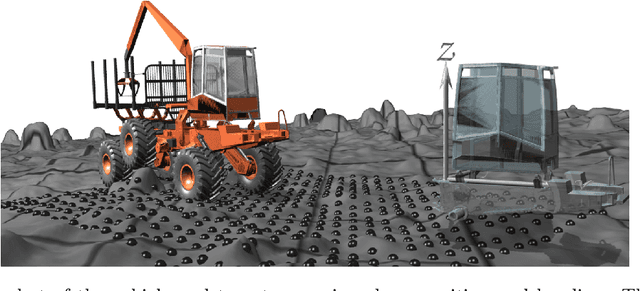
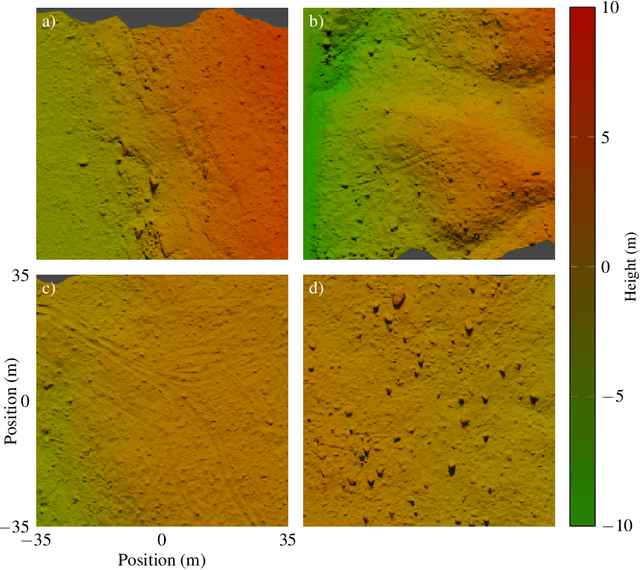
We explore the potential to control terrain vehicles using deep reinforcement in scenarios where human operators and traditional control methods are inadequate. This letter presents a controller that perceives, plans, and successfully controls a 16-tonne forestry vehicle with two frame articulation joints, six wheels, and their actively articulated suspensions to traverse rough terrain. The carefully shaped reward signal promotes safe, environmental, and efficient driving, which leads to the emergence of unprecedented driving skills. We test learned skills in a virtual environment, including terrains reconstructed from high-density laser scans of forest sites. The controller displays the ability to handle obstructing obstacles, slopes up to 27$^\circ$, and a variety of natural terrains, all with limited wheel slip, smooth, and upright traversal with intelligent use of the active suspensions. The results confirm that deep reinforcement learning has the potential to enhance control of vehicles with complex dynamics and high-dimensional observation data compared to human operators or traditional control methods, especially in rough terrain.