 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Model Benchmarking with Only a Few Observations
Oct 07, 2024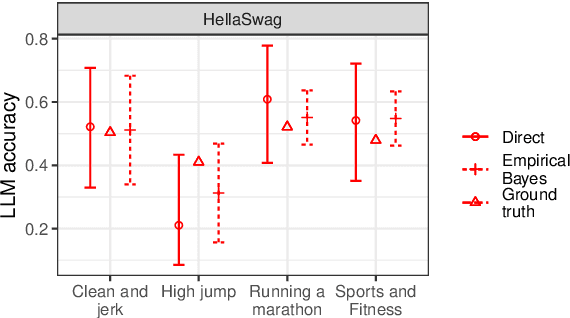
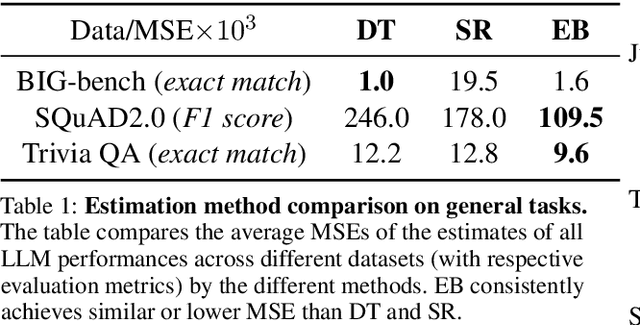
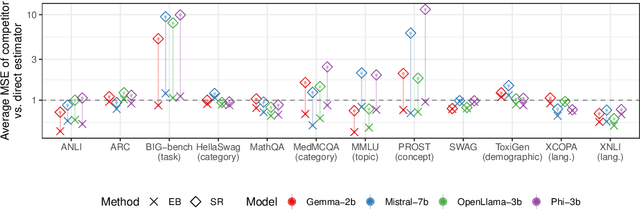
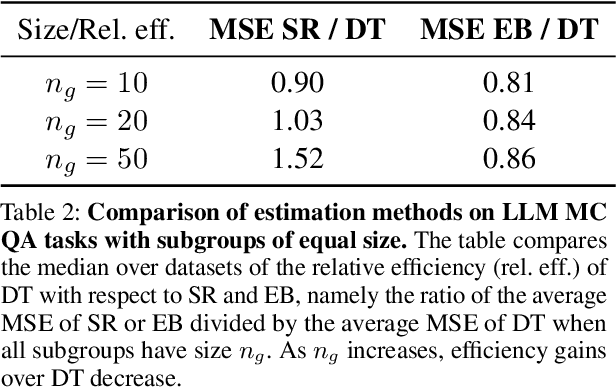
How can we precisely estimate a large language model's (LLM) accuracy on questions belonging to a specific topic within a larger question-answering dataset? The standard direct estimator, which averages the model's accuracy on the questions in each subgroup, may exhibit high variance for subgroups (topics) with small sample sizes. Synthetic regression modeling, which leverages the model's accuracy on questions about other topics, may yield biased estimates that are too unreliable for large subgroups. We prescribe a simple yet effective solution: an empirical Bayes (EB) estimator that balances direct and regression estimates for each subgroup separately, improving the precision of subgroup-level estimates of model performance. Our experiments on multiple datasets show that this approach consistently provides more precise estimates of the LLM performance compared to the direct and regression approaches, achieving substantial reductions in the mean squared error. Confidence intervals for EB estimates also have near-nominal coverage and are narrower compared to those for the direct estimator. Additional experiments on tabular and vision data validate the benefits of this EB approach.
A Framework for Efficient Model Evaluation through Stratification, Sampling, and Estimation
Jun 11, 2024
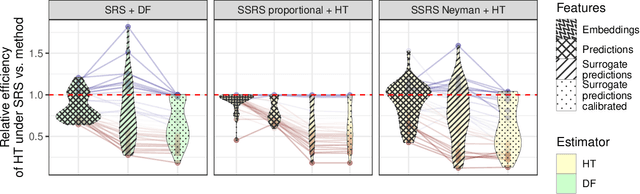


Model performance evaluation is a critical and expensive task in machine learning and computer vision. Without clear guidelines, practitioners often estimate model accuracy using a one-time random selection of the data. However, by employing tailored sampling and estimation strategies, one can obtain more precise estimates and reduce annotation costs. In this paper, we propose a statistical framework for model evaluation that includes stratification, sampling, and estimation components. We examine the statistical properties of each component and evaluate their efficiency (precision). One key result of our work is that stratification via k-means clustering based on accurate predictions of model performance yields efficient estimators. Our experiments on computer vision datasets show that this method consistently provides more precise accuracy estimates than the traditional simple random sampling, even with substantial efficiency gains of 10x. We also find that model-assisted estimators, which leverage predictions of model accuracy on the unlabeled portion of the dataset, are generally more efficient than the traditional estimates based solely on the labeled data.
Spoken Moments: Learning Joint Audio-Visual Representations from Video Descriptions
May 10, 2021

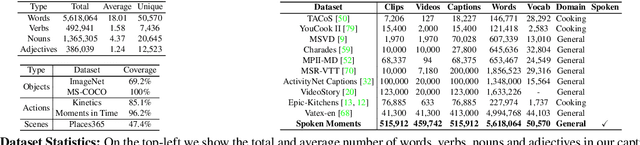
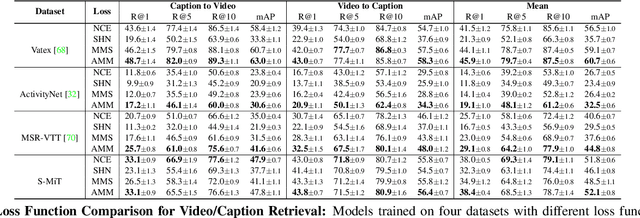
When people observe events, they are able to abstract key information and build concise summaries of what is happening. These summaries include contextual and semantic information describing the important high-level details (what, where, who and how) of the observed event and exclude background information that is deemed unimportant to the observer. With this in mind, the descriptions people generate for videos of different dynamic events can greatly improve our understanding of the key information of interest in each video. These descriptions can be captured in captions that provide expanded attributes for video labeling (e.g. actions/objects/scenes/sentiment/etc.) while allowing us to gain new insight into what people find important or necessary to summarize specific events. Existing caption datasets for video understanding are either small in scale or restricted to a specific domain. To address this, we present the Spoken Moments (S-MiT) dataset of 500k spoken captions each attributed to a unique short video depicting a broad range of different events. We collect our descriptions using audio recordings to ensure that they remain as natural and concise as possible while allowing us to scale the size of a large classification dataset. In order to utilize our proposed dataset, we present a novel Adaptive Mean Margin (AMM) approach to contrastive learning and evaluate our models on video/caption retrieval on multiple datasets. We show that our AMM approach consistently improves our results and that models trained on our Spoken Moments dataset generalize better than those trained on other video-caption datasets.
We Have So Much In Common: Modeling Semantic Relational Set Abstractions in Videos
Aug 12, 2020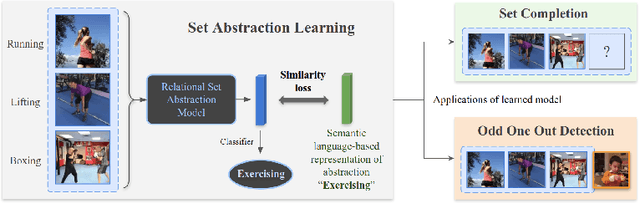
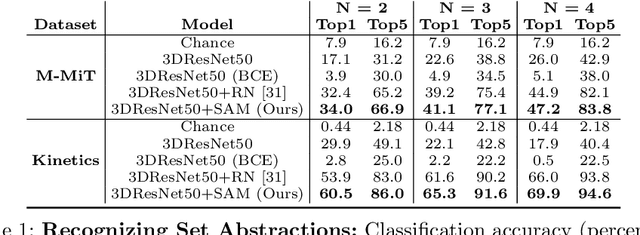
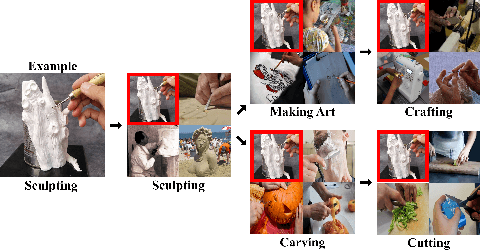
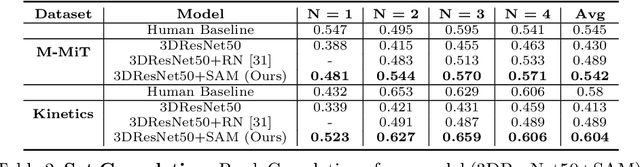
Identifying common patterns among events is a key ability in human and machine perception, as it underlies intelligent decision making. We propose an approach for learning semantic relational set abstractions on videos, inspired by human learning. We combine visual features with natural language supervision to generate high-level representations of similarities across a set of videos. This allows our model to perform cognitive tasks such as set abstraction (which general concept is in common among a set of videos?), set completion (which new video goes well with the set?), and odd one out detection (which video does not belong to the set?). Experiments on two video benchmarks, Kinetics and Multi-Moments in Time, show that robust and versatile representations emerge when learning to recognize commonalities among sets. We compare our model to several baseline algorithms and show that significant improvements result from explicitly learning relational abstractions with semantic supervision.
Multi-Moments in Time: Learning and Interpreting Models for Multi-Action Video Understanding
Nov 04, 2019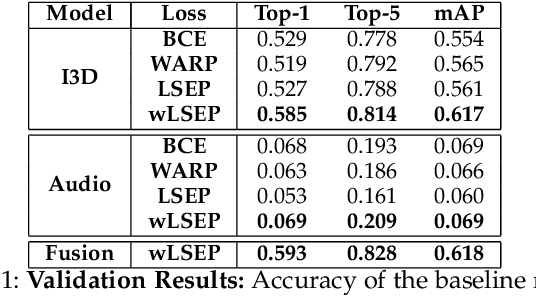
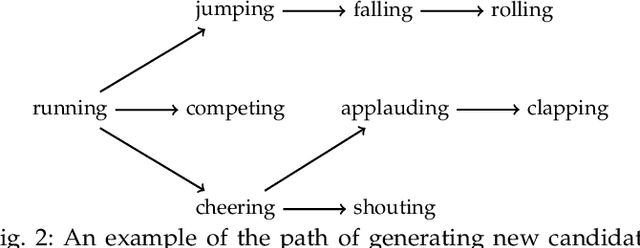
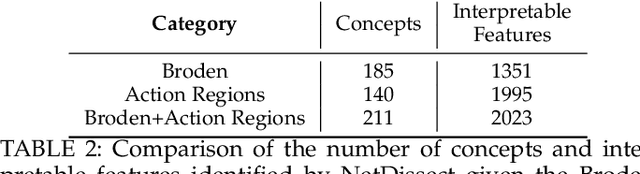
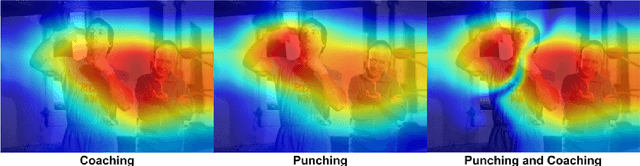
An event happening in the world is often made of different activities and actions that can unfold simultaneously or sequentially within a few seconds. However, most large-scale datasets built to train models for action recognition provide a single label per video clip. Consequently, models can be incorrectly penalized for classifying actions that exist in the videos but are not explicitly labeled and do not learn the full spectrum of information that would be mandatory to more completely comprehend different events and eventually learn causality between them. Towards this goal, we augmented the existing video dataset, Moments in Time (MiT), to include over two million action labels for over one million three second videos. This multi-label dataset introduces novel challenges on how to train and analyze models for multi-action detection. Here, we present baseline results for multi-action recognition using loss functions adapted for long tail multi-label learning and provide improved methods for visualizing and interpreting models trained for multi-label action detection.
Reasoning About Human-Object Interactions Through Dual Attention Networks
Sep 10, 2019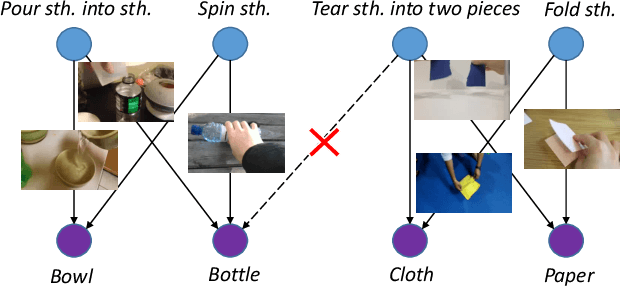

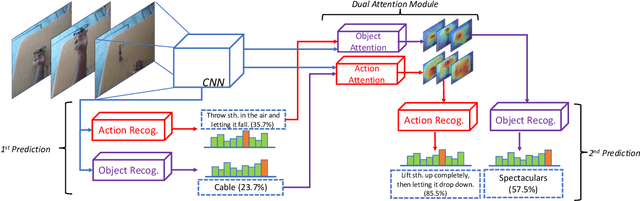
Objects are entities we act upon, where the functionality of an object is determined by how we interact with it. In this work we propose a Dual Attention Network model which reasons about human-object interactions. The dual-attentional framework weights the important features for objects and actions respectively. As a result, the recognition of objects and actions mutually benefit each other. The proposed model shows competitive classification performance on the human-object interaction dataset Something-Something. Besides, it can perform weak spatiotemporal localization and affordance segmentation, despite being trained only with video-level labels. The model not only finds when an action is happening and which object is being manipulated, but also identifies which part of the object is being interacted with. Project page: \url{https://dual-attention-network.github.io/}.
Multi-Agent Tensor Fusion for Contextual Trajectory Prediction
Apr 09, 2019
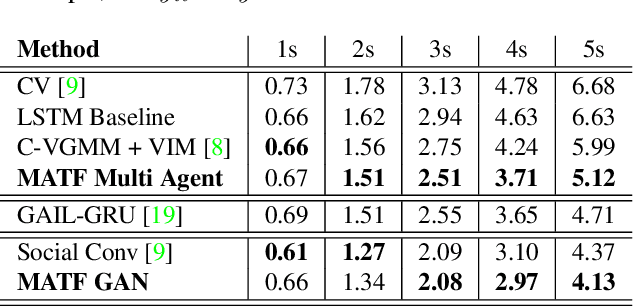
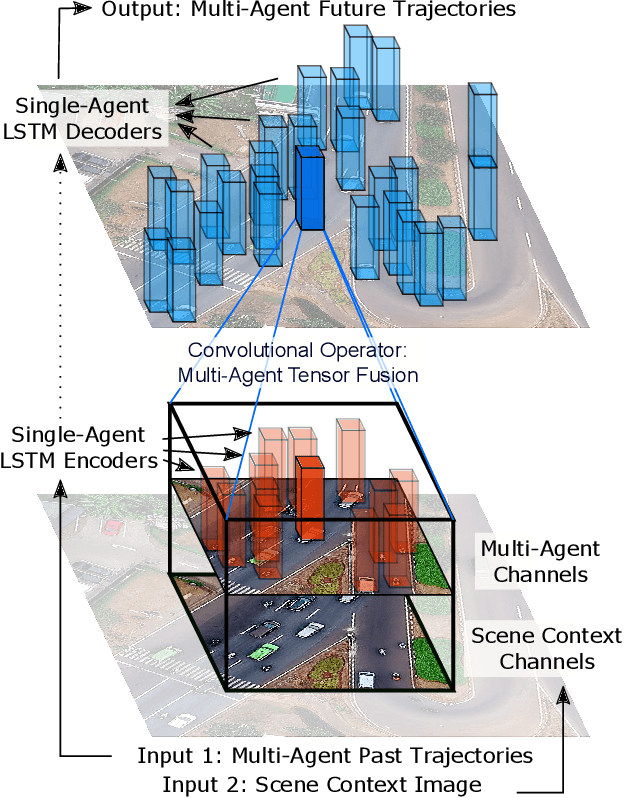
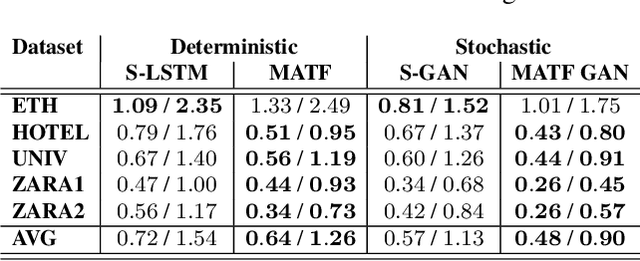
Accurate prediction of others' trajectories is essential for autonomous driving. Trajectory prediction is challenging because it requires reasoning about agents' past movements, social interactions among varying numbers and kinds of agents, constraints from the scene context, and the stochasticity of human behavior. Our approach models these interactions and constraints jointly within a novel Multi-Agent Tensor Fusion (MATF) network. Specifically, the model encodes multiple agents' past trajectories and the scene context into a Multi-Agent Tensor, then applies convolutional fusion to capture multiagent interactions while retaining the spatial structure of agents and the scene context. The model decodes recurrently to multiple agents' future trajectories, using adversarial loss to learn stochastic predictions. Experiments on both highway driving and pedestrian crowd datasets show that the model achieves state-of-the-art prediction accuracy.
Moments in Time Dataset: one million videos for event understanding
Jan 09, 2018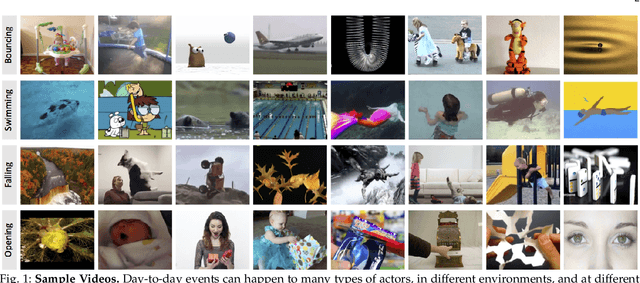
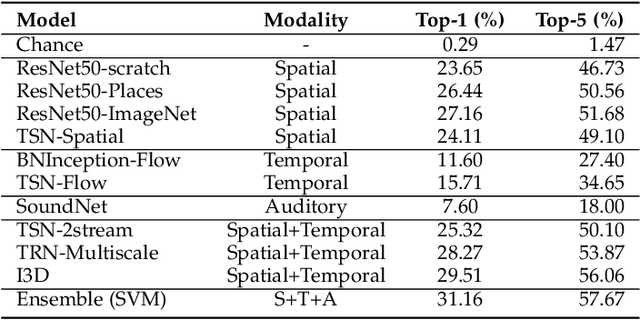
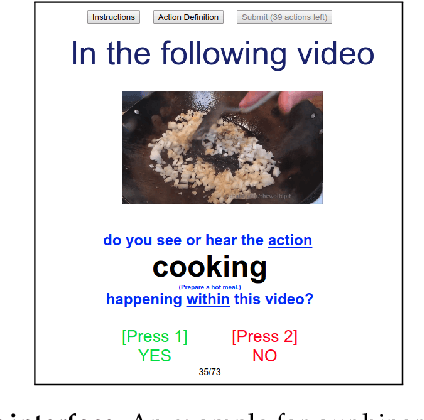
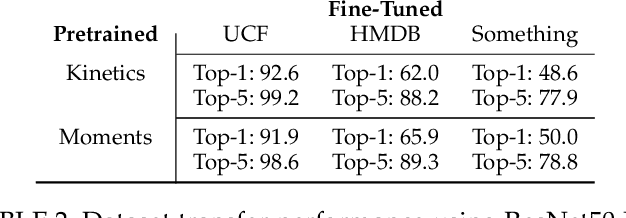
We present the Moments in Time Dataset, a large-scale human-annotated collection of one million short videos corresponding to dynamic events unfolding within three seconds. Modeling the spatial-audio-temporal dynamics even for actions occurring in 3 second videos poses many challenges: meaningful events do not include only people, but also objects, animals, and natural phenomena; visual and auditory events can be symmetrical or not in time ("opening" means "closing" in reverse order), and transient or sustained. We describe the annotation process of our dataset (each video is tagged with one action or activity label among 339 different classes), analyze its scale and diversity in comparison to other large-scale video datasets for action recognition, and report results of several baseline models addressing separately and jointly three modalities: spatial, temporal and auditory. The Moments in Time dataset designed to have a large coverage and diversity of events in both visual and auditory modalities, can serve as a new challenge to develop models that scale to the level of complexity and abstract reasoning that a human processes on a daily basis.
End to End Learning for Self-Driving Cars
Apr 25, 2016


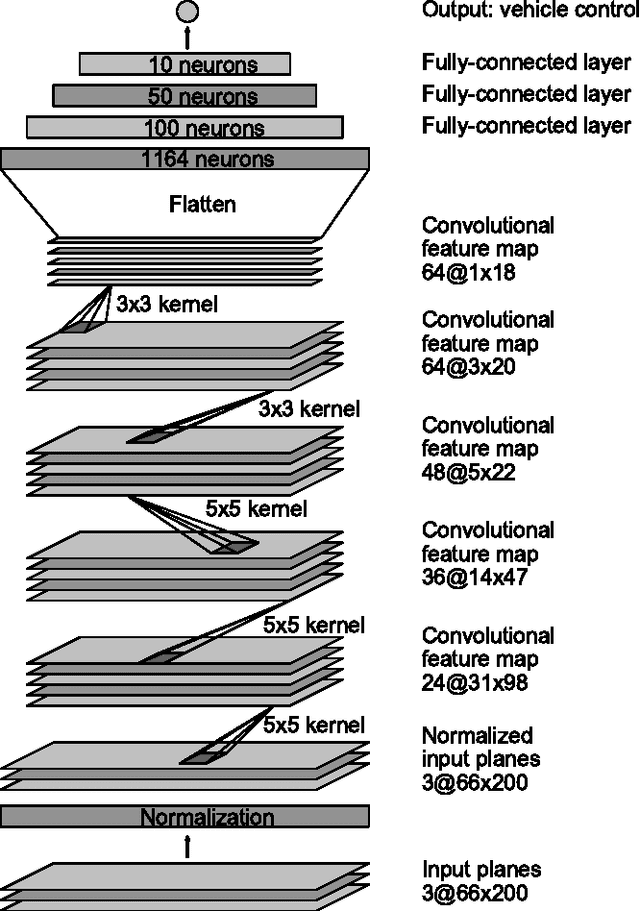
We trained a convolutional neural network (CNN) to map raw pixels from a single front-facing camera directly to steering commands. This end-to-end approach proved surprisingly powerful. With minimum training data from humans the system learns to drive in traffic on local roads with or without lane markings and on highways. It also operates in areas with unclear visual guidance such as in parking lots and on unpaved roads. The system automatically learns internal representations of the necessary processing steps such as detecting useful road features with only the human steering angle as the training signal. We never explicitly trained it to detect, for example, the outline of roads. Compared to explicit decomposition of the problem, such as lane marking detection, path planning, and control, our end-to-end system optimizes all processing steps simultaneously. We argue that this will eventually lead to better performance and smaller systems. Better performance will result because the internal components self-optimize to maximize overall system performance, instead of optimizing human-selected intermediate criteria, e.g., lane detection. Such criteria understandably are selected for ease of human interpretation which doesn't automatically guarantee maximum system performance. Smaller networks are possible because the system learns to solve the problem with the minimal number of processing steps. We used an NVIDIA DevBox and Torch 7 for training and an NVIDIA DRIVE(TM) PX self-driving car computer also running Torch 7 for determining where to drive. The system operates at 30 frames per second (FPS).