 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanoVGGT: Feed-Forward 3D Reconstruction from Panoramic Imagery
Mar 18, 2026Panoramic imagery offers a full 360° field of view and is increasingly common in consumer devices. However, it introduces non-pinhole distortions that challenge joint pose estimation and 3D reconstruction. Existing feed-forward models, built for perspective cameras, generalize poorly to this setting. We propose PanoVGGT, a permutation-equivariant Transformer framework that jointly predicts camera poses, depth maps, and 3D point clouds from one or multiple panoramas in a single forward pass. The model incorporates spherical-aware positional embeddings and a panorama-specific three-axis SO(3) rotation augmentation, enabling effective geometric reasoning in the spherical domain. To resolve inherent global-frame ambiguity, we further introduce a stochastic anchoring strategy during training. In addition, we contribute PanoCity, a large-scale outdoor panoramic dataset with dense depth and 6-DoF pose annotations. Extensive experiments on PanoCity and standard benchmarks demonstrate that PanoVGGT achieves competitive accuracy, strong robustness, and improved cross-domain generalization. Code and dataset will be released.
The Semantic Lifecycle in Embodied AI: Acquisition, Representation and Storage via Foundation Models
Jan 12, 2026Semantic information in embodied AI is inherently multi-source and multi-stage, making it challenging to fully leverage for achieving stable perception-to-action loops in real-world environments. Early studies have combined manual engineering with deep neural networks, achieving notable progress in specific semantic-related embodied tasks. However, as embodied agents encounter increasingly complex environments and open-ended tasks, the demand for more generalizable and robust semantic processing capabilities has become imperative. Recent advances in foundation models (FMs) address this challenge through their cross-domain generalization abilities and rich semantic priors, reshaping the landscape of embodied AI research. In this survey, we propose the Semantic Lifecycle as a unified framework to characterize the evolution of semantic knowledge within embodied AI driven by foundation models. Departing from traditional paradigms that treat semantic processing as isolated modules or disjoint tasks, our framework offers a holistic perspective that captures the continuous flow and maintenance of semantic knowledge. Guided by this embodied semantic lifecycle, we further analyze and compare recent advances across three key stages: acquisition, representation, and storage. Finally, we summarize existing challenges and outline promising directions for future research.
Trajectory Prediction with Latent Belief Energy-Based Model
Apr 07, 2021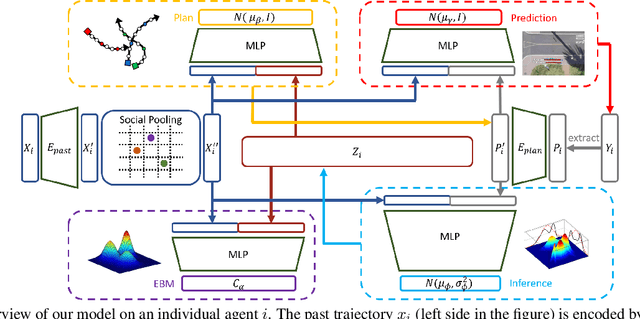
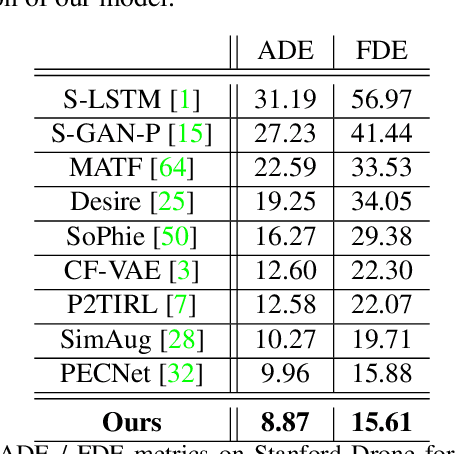
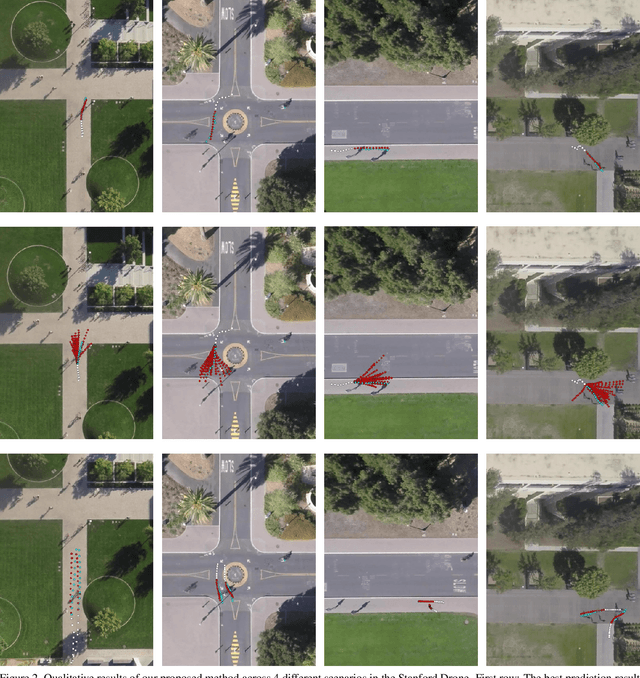
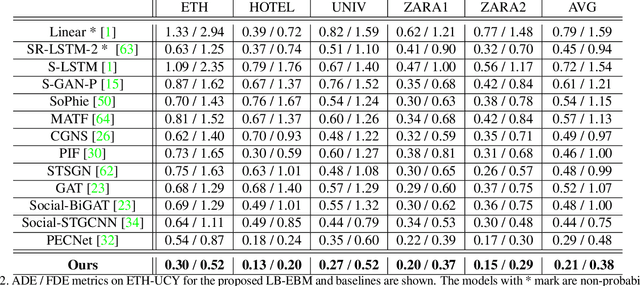
Human trajectory prediction is critical for autonomous platforms like self-driving cars or social robots. We present a latent belief energy-based model (LB-EBM) for diverse human trajectory forecast. LB-EBM is a probabilistic model with cost function defined in the latent space to account for the movement history and social context. The low-dimensionality of the latent space and the high expressivity of the EBM make it easy for the model to capture the multimodality of pedestrian trajectory distributions. LB-EBM is learned from expert demonstrations (i.e., human trajectories) projected into the latent space. Sampling from or optimizing the learned LB-EBM yields a belief vector which is used to make a path plan, which then in turn helps to predict a long-range trajectory. The effectiveness of LB-EBM and the two-step approach are supported by strong empirical results. Our model is able to make accurate, multi-modal, and social compliant trajectory predictions and improves over prior state-of-the-arts performance on the Stanford Drone trajectory prediction benchmark by 10.9% and on the ETH-UCY benchmark by 27.6%.
Resilient Load Restoration in Microgrids Considering Mobile Energy Storage Fleets: A Deep Reinforcement Learning Approach
Nov 06, 2019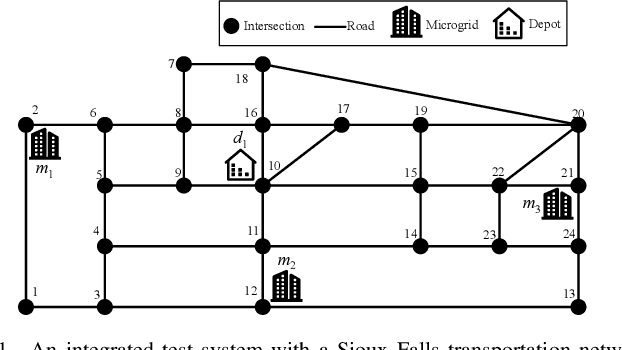
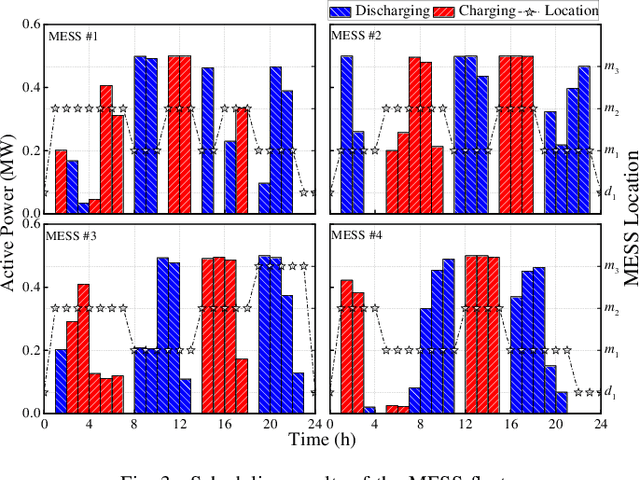
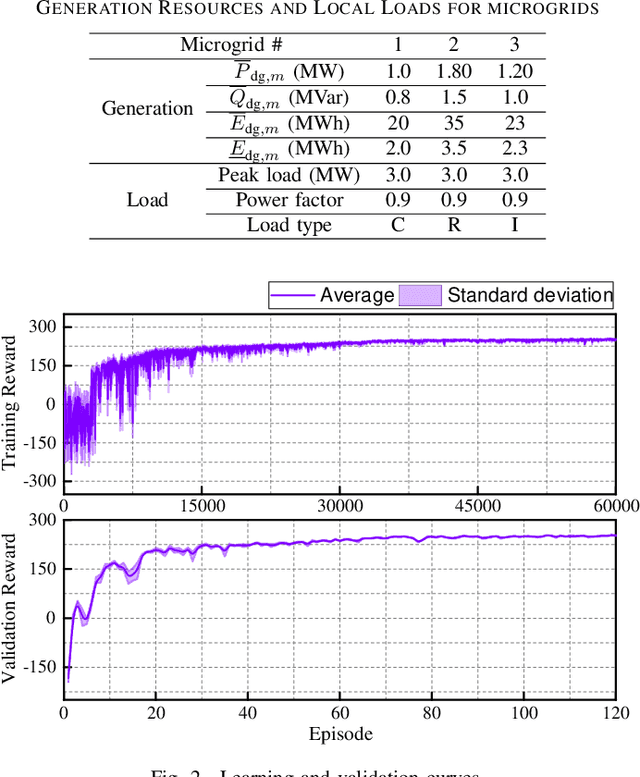
Mobile energy storage systems (MESSs) provide mobility and flexibility to enhance distribution system resilience. The paper proposes a Markov decision process (MDP) formulation for an integrated service restoration strategy that coordinates the scheduling of MESSs and resource dispatching of microgrids. The uncertainties in load consumption are taken into account. The deep reinforcement learning (DRL) algorithm is utilized to solve the MDP for optimal scheduling. Specifically, the twin delayed deep deterministic policy gradient (TD3) is applied to train the deep Q-network and policy network, then the well trained policy can be deployed in on-line manner to perform multiple actions simultaneously. The proposed model is demonstrated on an integrated test system with three microgrids connected by Sioux Falls transportation network. The simulation results indicate that mobile and stationary energy resources can be well coordinated to improve system resilience.
Learning Trajectory Prediction with Continuous Inverse Optimal Control via Langevin Sampling of Energy-Based Models
Apr 10, 2019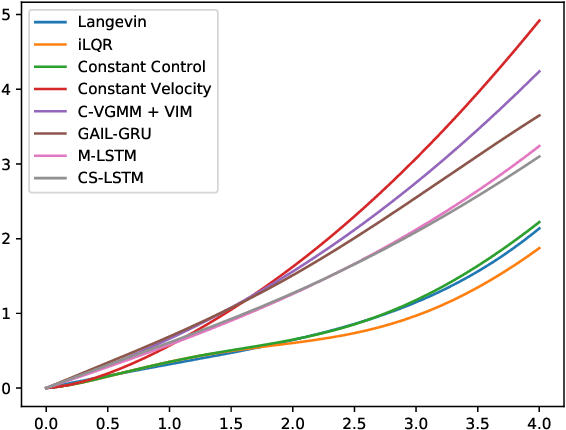
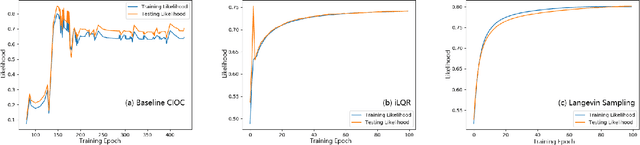
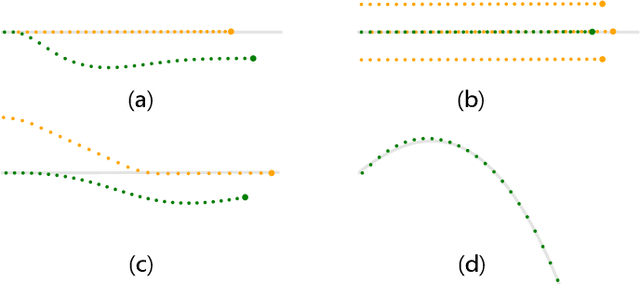

Autonomous driving is a challenging multiagent domain which requires optimizing complex, mixed cooperative-competitive interactions. Learning to predict contingent distributions over other vehicles' trajectories simplifies the problem, allowing approximate solutions by trajectory optimization with dynamic constraints. We take a model-based approach to prediction, in order to make use of structured prior knowledge of vehicle kinematics, and the assumption that other drivers plan trajectories to minimize an unknown cost function. We introduce a novel inverse optimal control (IOC) algorithm to learn other vehicles' cost functions in an energy-based generative model. Langevin Sampling, a Monte Carlo based sampling algorithm, is used to directly sample the control sequence. Our algorithm provides greater flexibility than standard IOC methods, and can learn higher-level, non-Markovian cost functions defined over entire trajectories. We extend weighted feature-based cost functions with neural networks to obtain NN-augmented cost functions, which combine the advantages of both model-based and model-free learning. Results show that model-based IOC can achieve state-of-the-art vehicle trajectory prediction accuracy, and naturally take scene information into account.
Multi-Agent Tensor Fusion for Contextual Trajectory Prediction
Apr 09, 2019
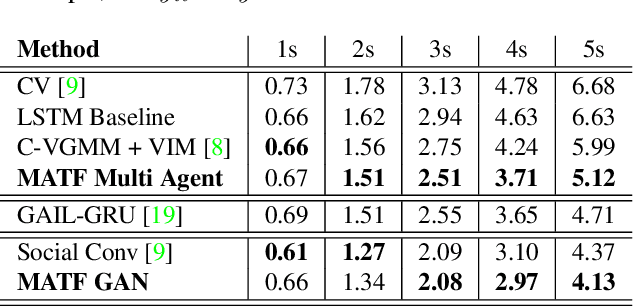
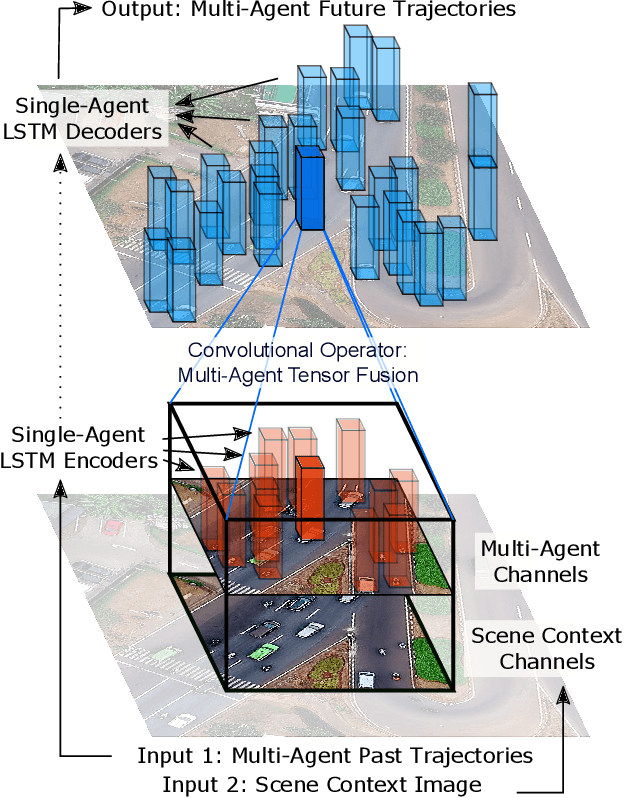
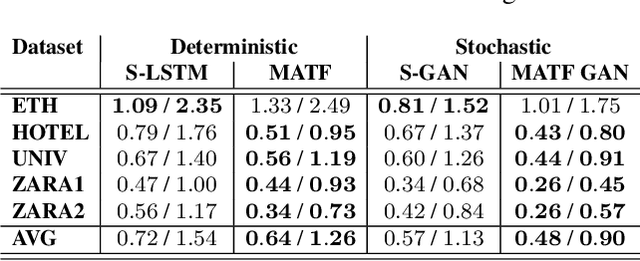
Accurate prediction of others' trajectories is essential for autonomous driving. Trajectory prediction is challenging because it requires reasoning about agents' past movements, social interactions among varying numbers and kinds of agents, constraints from the scene context, and the stochasticity of human behavior. Our approach models these interactions and constraints jointly within a novel Multi-Agent Tensor Fusion (MATF) network. Specifically, the model encodes multiple agents' past trajectories and the scene context into a Multi-Agent Tensor, then applies convolutional fusion to capture multiagent interactions while retaining the spatial structure of agents and the scene context. The model decodes recurrently to multiple agents' future trajectories, using adversarial loss to learn stochastic predictions. Experiments on both highway driving and pedestrian crowd datasets show that the model achieves state-of-the-art prediction accuracy.