 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptFlow: Fast Optimization-based Scene Flow Estimation without Supervision
Jan 04, 2024



Scene flow estimation is a crucial component in the development of autonomous driving and 3D robotics, providing valuable information for environment perception and navigation. Despite the advantages of learning-based scene flow estimation techniques, their domain specificity and limited generalizability across varied scenarios pose challenges. In contrast, non-learning optimization-based methods, incorporating robust priors or regularization, offer competitive scene flow estimation performance, require no training, and show extensive applicability across datasets, but suffer from lengthy inference times. In this paper, we present OptFlow, a fast optimization-based scene flow estimation method. Without relying on learning or any labeled datasets, OptFlow achieves state-of-the-art performance for scene flow estimation on popular autonomous driving benchmarks. It integrates a local correlation weight matrix for correspondence matching, an adaptive correspondence threshold limit for nearest-neighbor search, and graph prior rigidity constraints, resulting in expedited convergence and improved point correspondence identification. Moreover, we demonstrate how integrating a point cloud registration function within our objective function bolsters accuracy and differentiates between static and dynamic points without relying on external odometry data. Consequently, OptFlow outperforms the baseline graph-prior method by approximately 20% and the Neural Scene Flow Prior method by 5%-7% in accuracy, all while offering the fastest inference time among all non-learning scene flow estimation methods.
Learning Trajectory Prediction with Continuous Inverse Optimal Control via Langevin Sampling of Energy-Based Models
Apr 10, 2019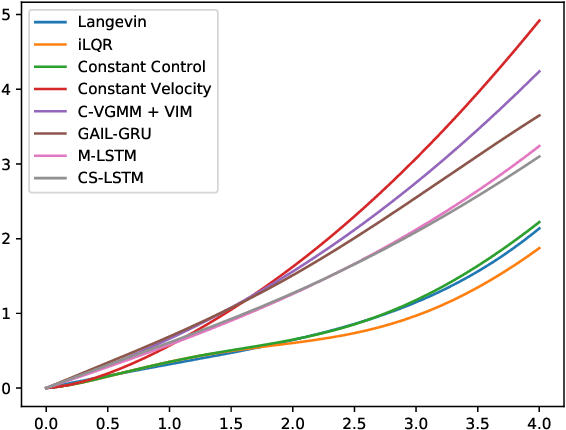
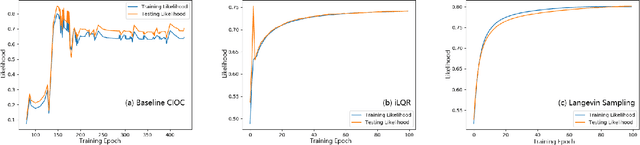
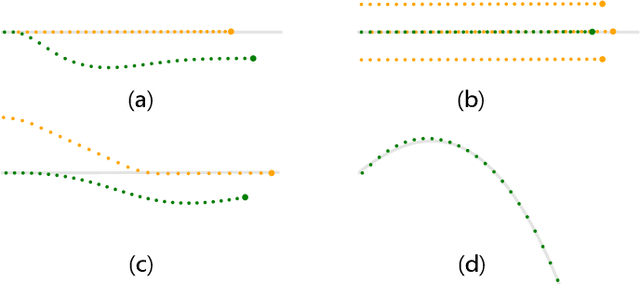

Autonomous driving is a challenging multiagent domain which requires optimizing complex, mixed cooperative-competitive interactions. Learning to predict contingent distributions over other vehicles' trajectories simplifies the problem, allowing approximate solutions by trajectory optimization with dynamic constraints. We take a model-based approach to prediction, in order to make use of structured prior knowledge of vehicle kinematics, and the assumption that other drivers plan trajectories to minimize an unknown cost function. We introduce a novel inverse optimal control (IOC) algorithm to learn other vehicles' cost functions in an energy-based generative model. Langevin Sampling, a Monte Carlo based sampling algorithm, is used to directly sample the control sequence. Our algorithm provides greater flexibility than standard IOC methods, and can learn higher-level, non-Markovian cost functions defined over entire trajectories. We extend weighted feature-based cost functions with neural networks to obtain NN-augmented cost functions, which combine the advantages of both model-based and model-free learning. Results show that model-based IOC can achieve state-of-the-art vehicle trajectory prediction accuracy, and naturally take scene information into account.
Multi-Agent Tensor Fusion for Contextual Trajectory Prediction
Apr 09, 2019
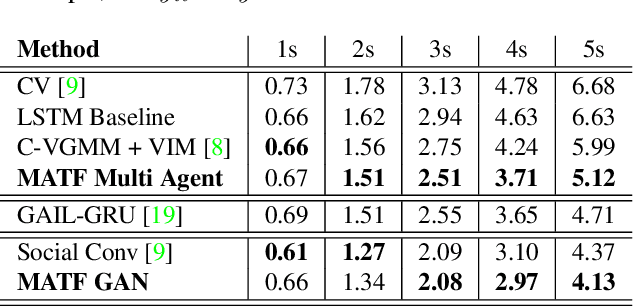
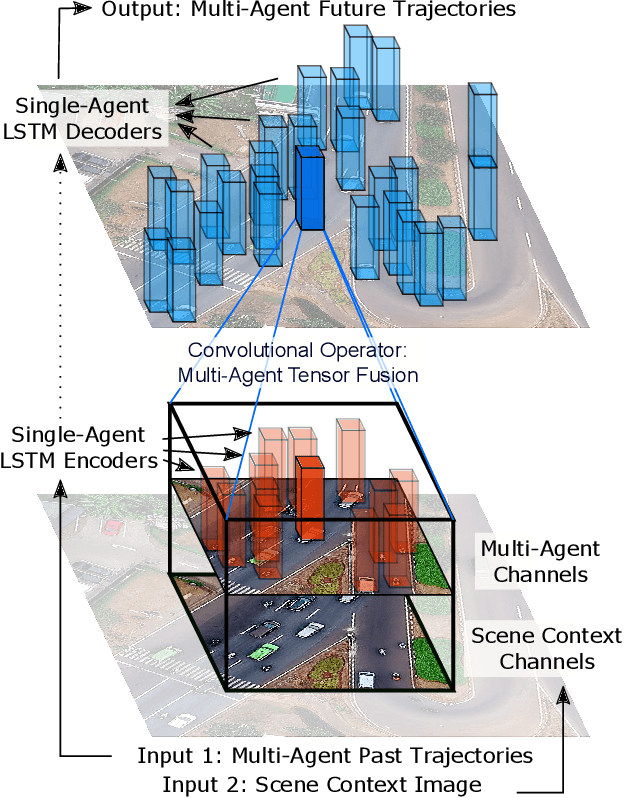
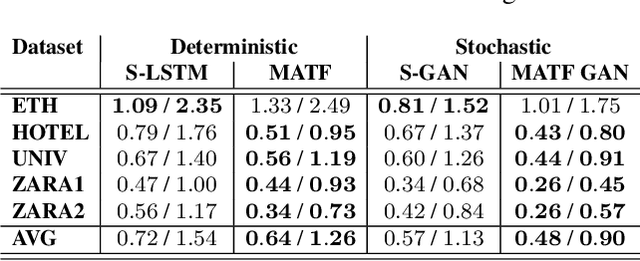
Accurate prediction of others' trajectories is essential for autonomous driving. Trajectory prediction is challenging because it requires reasoning about agents' past movements, social interactions among varying numbers and kinds of agents, constraints from the scene context, and the stochasticity of human behavior. Our approach models these interactions and constraints jointly within a novel Multi-Agent Tensor Fusion (MATF) network. Specifically, the model encodes multiple agents' past trajectories and the scene context into a Multi-Agent Tensor, then applies convolutional fusion to capture multiagent interactions while retaining the spatial structure of agents and the scene context. The model decodes recurrently to multiple agents' future trajectories, using adversarial loss to learn stochastic predictions. Experiments on both highway driving and pedestrian crowd datasets show that the model achieves state-of-the-art prediction accuracy.
A cognitive diversity framework for radar target classification
Oct 30, 2011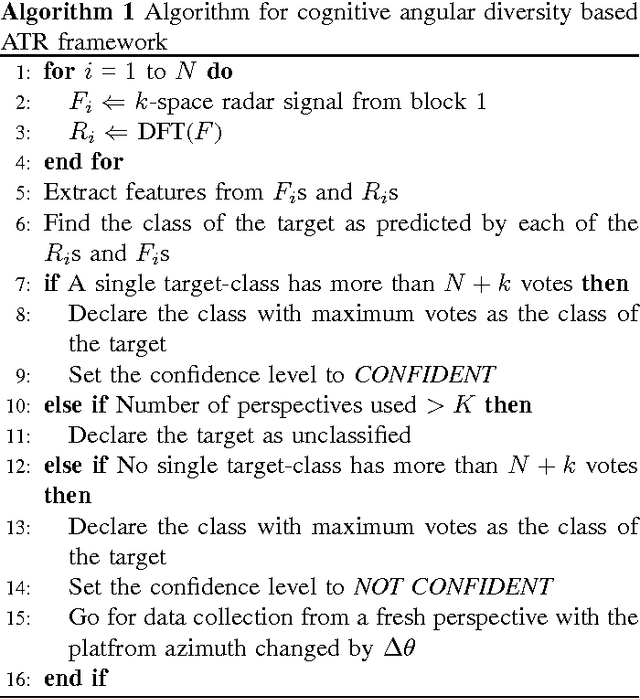
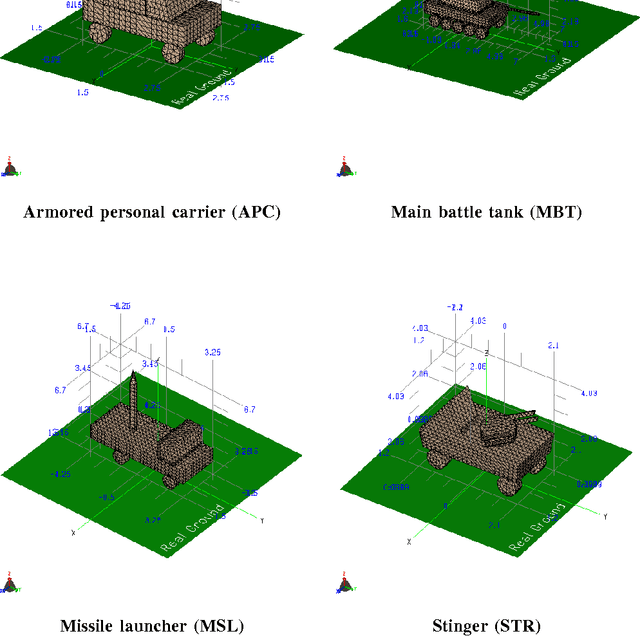
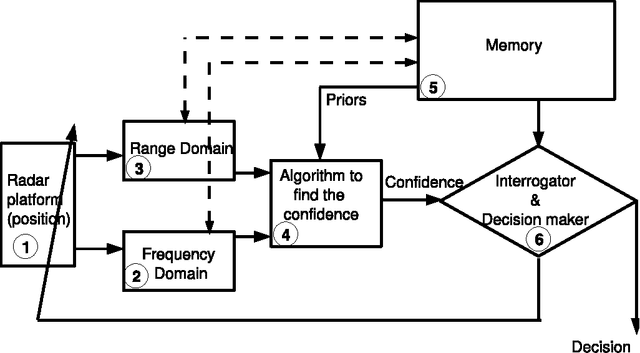
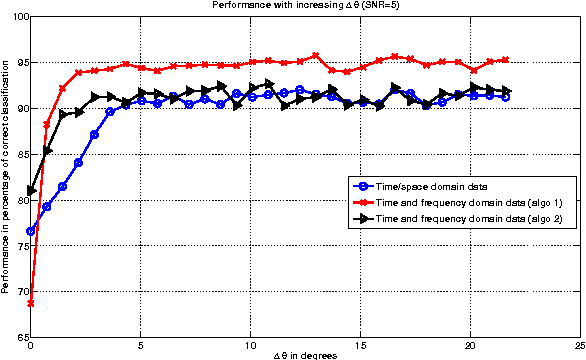
Classification of targets by radar has proved to be notoriously difficult with the best systems still yet to attain sufficiently high levels of performance and reliability. In the current contribution we explore a new design of radar based target recognition, where angular diversity is used in a cognitive manner to attain better performance. Performance is bench- marked against conventional classification schemes. The proposed scheme can easily be extended to cognitive target recognition based on multiple diversity strategies.