 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Trajectory Prediction with Continuous Inverse Optimal Control via Langevin Sampling of Energy-Based Models
Paper and Code
Apr 10, 2019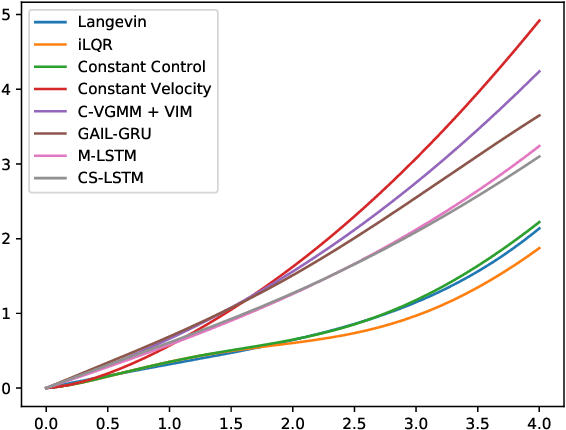
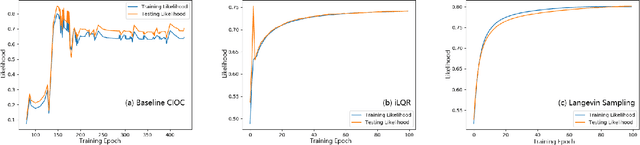
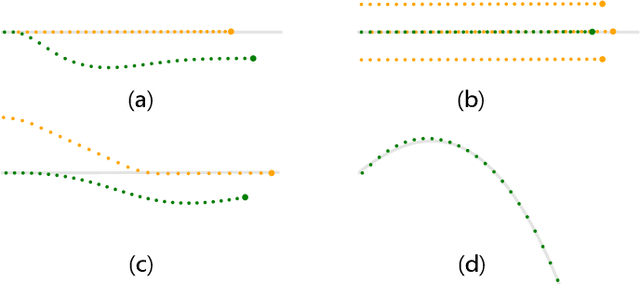

Autonomous driving is a challenging multiagent domain which requires optimizing complex, mixed cooperative-competitive interactions. Learning to predict contingent distributions over other vehicles' trajectories simplifies the problem, allowing approximate solutions by trajectory optimization with dynamic constraints. We take a model-based approach to prediction, in order to make use of structured prior knowledge of vehicle kinematics, and the assumption that other drivers plan trajectories to minimize an unknown cost function. We introduce a novel inverse optimal control (IOC) algorithm to learn other vehicles' cost functions in an energy-based generative model. Langevin Sampling, a Monte Carlo based sampling algorithm, is used to directly sample the control sequence. Our algorithm provides greater flexibility than standard IOC methods, and can learn higher-level, non-Markovian cost functions defined over entire trajectories. We extend weighted feature-based cost functions with neural networks to obtain NN-augmented cost functions, which combine the advantages of both model-based and model-free learning. Results show that model-based IOC can achieve state-of-the-art vehicle trajectory prediction accuracy, and naturally take scene information into account.