 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Tree of Thoughts: Deliberate Manipulation Planning with Embodied World Model
Dec 09, 2025World models have emerged as a pivotal component in robot manipulation planning, enabling agents to predict future environmental states and reason about the consequences of actions before execution. While video-generation models are increasingly adopted, they often lack rigorous physical grounding, leading to hallucinations and a failure to maintain consistency in long-horizon physical constraints. To address these limitations, we propose Embodied Tree of Thoughts (EToT), a novel Real2Sim2Real planning framework that leverages a physics-based interactive digital twin as an embodied world model. EToT formulates manipulation planning as a tree search expanded through two synergistic mechanisms: (1) Priori Branching, which generates diverse candidate execution paths based on semantic and spatial analysis; and (2) Reflective Branching, which utilizes VLMs to diagnose execution failures within the simulator and iteratively refine the planning tree with corrective actions. By grounding high-level reasoning in a physics simulator, our framework ensures that generated plans adhere to rigid-body dynamics and collision constraints. We validate EToT on a suite of short- and long-horizon manipulation tasks, where it consistently outperforms baselines by effectively predicting physical dynamics and adapting to potential failures. Website at https://embodied-tree-of-thoughts.github.io .
ViTaMIn-B: A Reliable and Efficient Visuo-Tactile Bimanual Manipulation Interface
Nov 08, 2025Handheld devices have opened up unprecedented opportunities to collect large-scale, high-quality demonstrations efficiently. However, existing systems often lack robust tactile sensing or reliable pose tracking to handle complex interaction scenarios, especially for bimanual and contact-rich tasks. In this work, we propose ViTaMIn-B, a more capable and efficient handheld data collection system for such tasks. We first design DuoTact, a novel compliant visuo-tactile sensor built with a flexible frame to withstand large contact forces during manipulation while capturing high-resolution contact geometry. To enhance the cross-sensor generalizability, we propose reconstructing the sensor's global deformation as a 3D point cloud and using it as the policy input. We further develop a robust, unified 6-DoF bimanual pose acquisition process using Meta Quest controllers, which eliminates the trajectory drift issue in common SLAM-based methods. Comprehensive user studies confirm the efficiency and high usability of ViTaMIn-B among novice and expert operators. Furthermore, experiments on four bimanual manipulation tasks demonstrate its superior task performance relative to existing systems.
Reflection-Based Task Adaptation for Self-Improving VLA
Oct 14, 2025Pre-trained Vision-Language-Action (VLA) models represent a major leap towards general-purpose robots, yet efficiently adapting them to novel, specific tasks in-situ remains a significant hurdle. While reinforcement learning (RL) is a promising avenue for such adaptation, the process often suffers from low efficiency, hindering rapid task mastery. We introduce Reflective Self-Adaptation, a framework for rapid, autonomous task adaptation without human intervention. Our framework establishes a self-improving loop where the agent learns from its own experience to enhance both strategy and execution. The core of our framework is a dual-pathway architecture that addresses the full adaptation lifecycle. First, a Failure-Driven Reflective RL pathway enables rapid learning by using the VLM's causal reasoning to automatically synthesize a targeted, dense reward function from failure analysis. This provides a focused learning signal that significantly accelerates policy exploration. However, optimizing such proxy rewards introduces a potential risk of "reward hacking," where the agent masters the reward function but fails the actual task. To counteract this, our second pathway, Success-Driven Quality-Guided SFT, grounds the policy in holistic success. It identifies and selectively imitates high-quality successful trajectories, ensuring the agent remains aligned with the ultimate task goal. This pathway is strengthened by a conditional curriculum mechanism to aid initial exploration. We conduct experiments in challenging manipulation tasks. The results demonstrate that our framework achieves faster convergence and higher final success rates compared to representative baselines. Our work presents a robust solution for creating self-improving agents that can efficiently and reliably adapt to new environments.
Spiking Transformers Need High Frequency Information
May 24, 2025Spiking Transformers offer an energy-efficient alternative to conventional deep learning by transmitting information solely through binary (0/1) spikes. However, there remains a substantial performance gap compared to artificial neural networks. A common belief is that their binary and sparse activation transmission leads to information loss, thus degrading feature representation and accuracy. In this work, however, we reveal for the first time that spiking neurons preferentially propagate low-frequency information. We hypothesize that the rapid dissipation of high-frequency components is the primary cause of performance degradation. For example, on Cifar-100, adopting Avg-Pooling (low-pass) for token mixing lowers performance to 76.73%; interestingly, replacing it with Max-Pooling (high-pass) pushes the top-1 accuracy to 79.12%, surpassing the well-tuned Spikformer baseline by 0.97%. Accordingly, we introduce Max-Former that restores high-frequency signals through two frequency-enhancing operators: extra Max-Pooling in patch embedding and Depth-Wise Convolution in place of self-attention. Notably, our Max-Former (63.99 M) hits the top-1 accuracy of 82.39% on ImageNet, showing a +7.58% improvement over Spikformer with comparable model size (74.81%, 66.34 M). We hope this simple yet effective solution inspires future research to explore the distinctive nature of spiking neural networks, beyond the established practice in standard deep learning.
Exploration by Random Distribution Distillation
May 16, 2025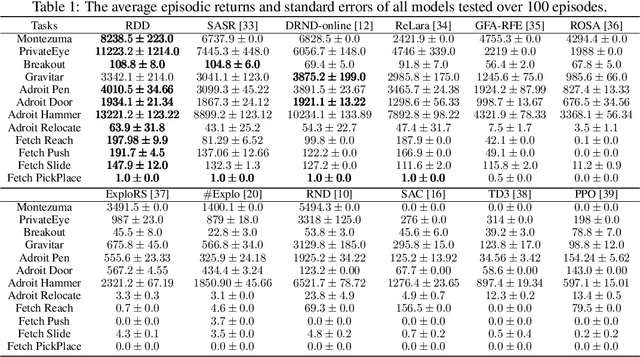
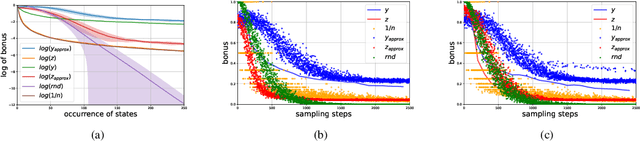
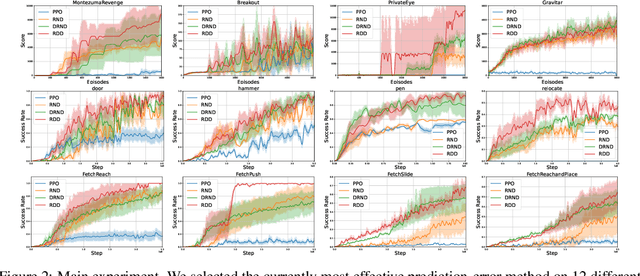
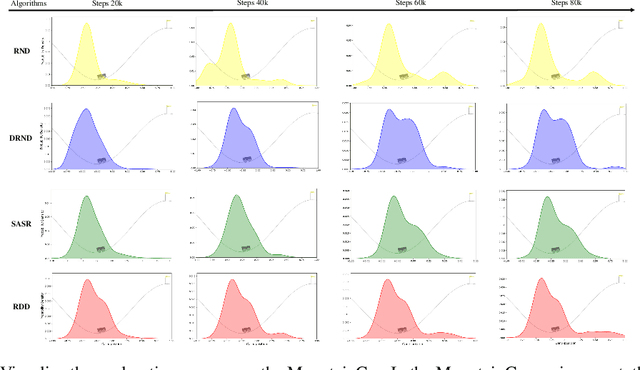
Exploration remains a critical challenge in online reinforcement learning, as an agent must effectively explore unknown environments to achieve high returns. Currently, the main exploration algorithms are primarily count-based methods and curiosity-based methods, with prediction-error methods being a prominent example. In this paper, we propose a novel method called \textbf{R}andom \textbf{D}istribution \textbf{D}istillation (RDD), which samples the output of a target network from a normal distribution. RDD facilitates a more extensive exploration by explicitly treating the difference between the prediction network and the target network as an intrinsic reward. Furthermore, by introducing randomness into the output of the target network for a given state and modeling it as a sample from a normal distribution, intrinsic rewards are bounded by two key components: a pseudo-count term ensuring proper exploration decay and a discrepancy term accounting for predictor convergence. We demonstrate that RDD effectively unifies both count-based and prediction-error approaches. It retains the advantages of prediction-error methods in high-dimensional spaces, while also implementing an intrinsic reward decay mode akin to the pseudo-count method. In the experimental section, RDD is compared with more advanced methods in a series of environments. Both theoretical analysis and experimental results confirm the effectiveness of our approach in improving online exploration for reinforcement learning tasks.
Dexterous Hand Manipulation via Efficient Imitation-Bootstrapped Online Reinforcement Learning
Mar 06, 2025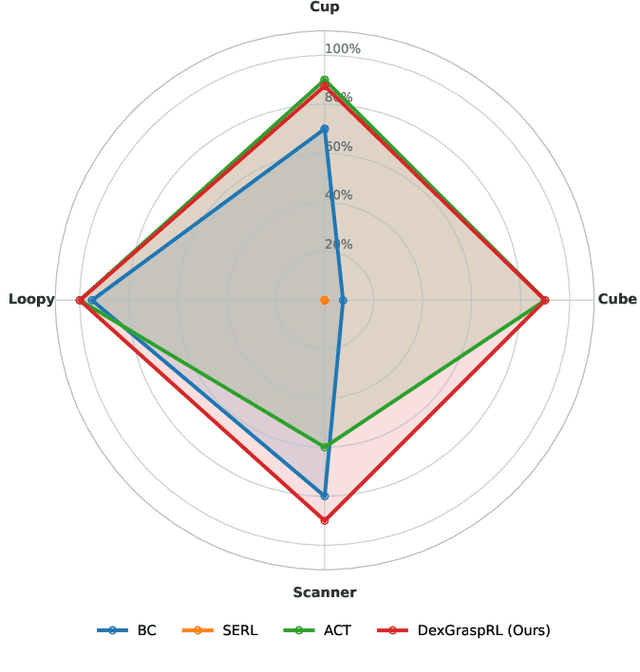
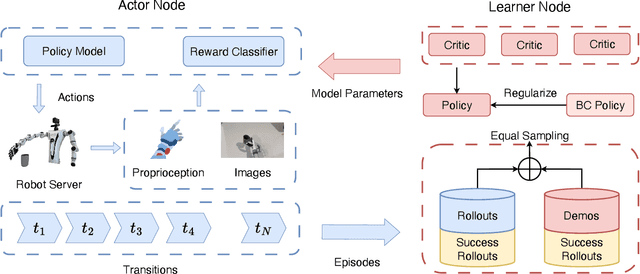
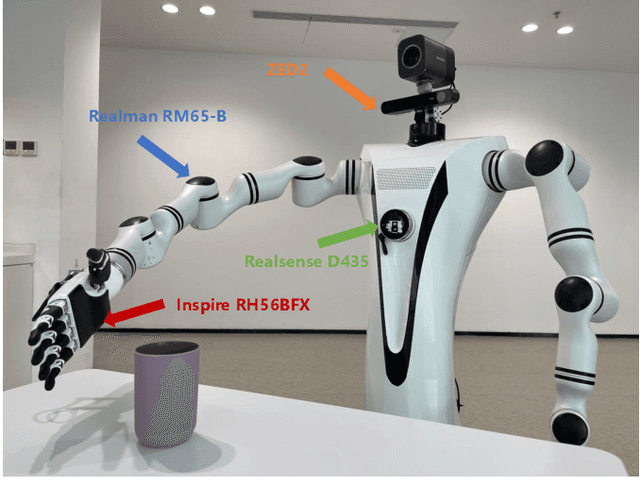
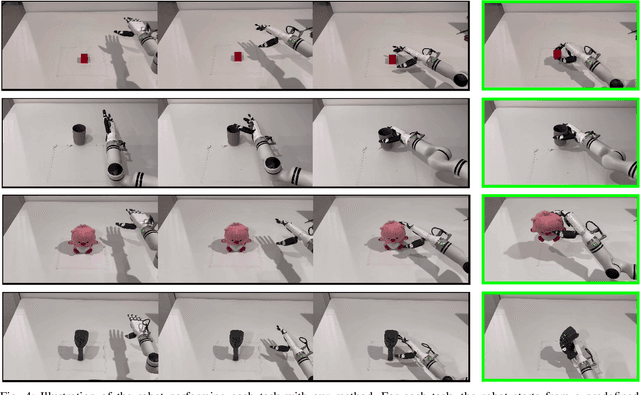
Dexterous hand manipulation in real-world scenarios presents considerable challenges due to its demands for both dexterity and precision. While imitation learning approaches have thoroughly examined these challenges, they still require a significant number of expert demonstrations and are limited by a constrained performance upper bound. In this paper, we propose a novel and efficient Imitation-Bootstrapped Online Reinforcement Learning (IBORL) method tailored for robotic dexterous hand manipulation in real-world environments. Specifically, we pretrain the policy using a limited set of expert demonstrations and subsequently finetune this policy through direct reinforcement learning in the real world. To address the catastrophic forgetting issues that arise from the distribution shift between expert demonstrations and real-world environments, we design a regularization term that balances the exploration of novel behaviors with the preservation of the pretrained policy. Our experiments with real-world tasks demonstrate that our method significantly outperforms existing approaches, achieving an almost 100% success rate and a 23% improvement in cycle time. Furthermore, by finetuning with online reinforcement learning, our method surpasses expert demonstrations and uncovers superior policies. Our code and empirical results are available in https://hggforget.github.io/iborl.github.io/.
An Atomic Skill Library Construction Method for Data-Efficient Embodied Manipulation
Jan 25, 2025



Embodied manipulation is a fundamental ability in the realm of embodied artificial intelligence. Although current embodied manipulation models show certain generalizations in specific settings, they struggle in new environments and tasks due to the complexity and diversity of real-world scenarios. The traditional end-to-end data collection and training manner leads to significant data demands, which we call ``data explosion''. To address the issue, we introduce a three-wheeled data-driven method to build an atomic skill library. We divide tasks into subtasks using the Vision-Language Planning (VLP). Then, atomic skill definitions are formed by abstracting the subtasks. Finally, an atomic skill library is constructed via data collection and Vision-Language-Action (VLA) fine-tuning. As the atomic skill library expands dynamically with the three-wheel update strategy, the range of tasks it can cover grows naturally. In this way, our method shifts focus from end-to-end tasks to atomic skills, significantly reducing data costs while maintaining high performance and enabling efficient adaptation to new tasks. Extensive experiments in real-world settings demonstrate the effectiveness and efficiency of our approach.
DexSim2Real$^{2}$: Building Explicit World Model for Precise Articulated Object Dexterous Manipulation
Sep 13, 2024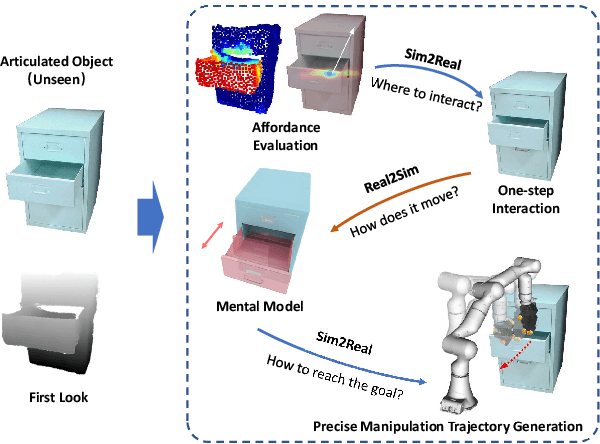
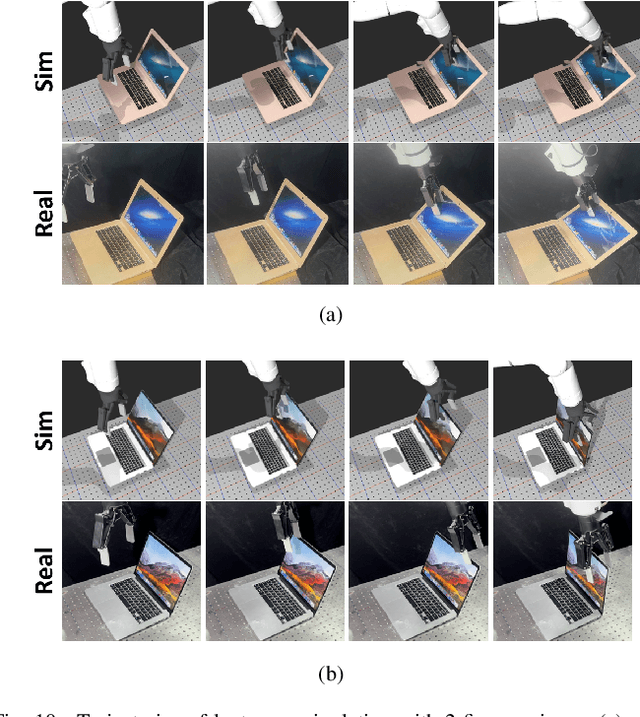
Articulated object manipulation is ubiquitous in daily life. In this paper, we present DexSim2Real$^{2}$, a novel robot learning framework for goal-conditioned articulated object manipulation using both two-finger grippers and multi-finger dexterous hands. The key of our framework is constructing an explicit world model of unseen articulated objects through active one-step interactions. This explicit world model enables sampling-based model predictive control to plan trajectories achieving different manipulation goals without needing human demonstrations or reinforcement learning. It first predicts an interaction motion using an affordance estimation network trained on self-supervised interaction data or videos of human manipulation from the internet. After executing this interaction on the real robot, the framework constructs a digital twin of the articulated object in simulation based on the two point clouds before and after the interaction. For dexterous multi-finger manipulation, we propose to utilize eigengrasp to reduce the high-dimensional action space, enabling more efficient trajectory searching. Extensive experiments validate the framework's effectiveness for precise articulated object manipulation in both simulation and the real world using a two-finger gripper and a 16-DoF dexterous hand. The robust generalizability of the explicit world model also enables advanced manipulation strategies, such as manipulating with different tools.
Preferred-Action-Optimized Diffusion Policies for Offline Reinforcement Learning
May 29, 2024



Offline reinforcement learning (RL) aims to learn optimal policies from previously collected datasets. Recently, due to their powerful representational capabilities, diffusion models have shown significant potential as policy models for offline RL issues. However, previous offline RL algorithms based on diffusion policies generally adopt weighted regression to improve the policy. This approach optimizes the policy only using the collected actions and is sensitive to Q-values, which limits the potential for further performance enhancement. To this end, we propose a novel preferred-action-optimized diffusion policy for offline RL. In particular, an expressive conditional diffusion model is utilized to represent the diverse distribution of a behavior policy. Meanwhile, based on the diffusion model, preferred actions within the same behavior distribution are automatically generated through the critic function. Moreover, an anti-noise preference optimization is designed to achieve policy improvement by using the preferred actions, which can adapt to noise-preferred actions for stable training. Extensive experiments demonstrate that the proposed method provides competitive or superior performance compared to previous state-of-the-art offline RL methods, particularly in sparse reward tasks such as Kitchen and AntMaze. Additionally, we empirically prove the effectiveness of anti-noise preference optimization.
Empowering Embodied Manipulation: A Bimanual-Mobile Robot Manipulation Dataset for Household Tasks
May 29, 2024



As Embodied AI advances, it increasingly enables robots to handle the complexity of household manipulation tasks more effectively. However, the application of robots in these settings remains limited due to the scarcity of bimanual-mobile robot manipulation datasets. Existing datasets either focus solely on simple grasping tasks using single-arm robots without mobility, or collect sensor data limited to a narrow scope of sensory inputs. As a result, these datasets often fail to encapsulate the intricate and dynamic nature of real-world tasks that bimanual-mobile robots are expected to perform. To address these limitations, we introduce BRMData, a Bimanual-mobile Robot Manipulation Dataset designed specifically for household applications. The dataset includes 10 diverse household tasks, ranging from simple single-arm manipulation to more complex dual-arm and mobile manipulations. It is collected using multi-view and depth-sensing data acquisition strategies. Human-robot interactions and multi-object manipulations are integrated into the task designs to closely simulate real-world household applications. Moreover, we present a Manipulation Efficiency Score (MES) metric to evaluate both the precision and efficiency of robot manipulation methods. BRMData aims to drive the development of versatile robot manipulation technologies, specifically focusing on advancing imitation learning methods from human demonstrations. The dataset is now open-sourced and available at https://embodiedrobot.github.io/, enhancing research and development efforts in the field of Embodied Manipulation.