 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiGSP:Implicit Gradient Subspace Projection for Efficient Continual Learning of Vision-Language Models
May 19, 2026Vision-Language Models require efficient adaptation to continually emerging downstream tasks. While Parameter-Efficient Fine-Tuning mitigates catastrophic forgetting, assigning isolated modules per task leads to parameter explosion. Conversely, recent similarity-driven sharing mechanisms falsely equate superficial visual similarity with underlying alignment consistency. This fundamental mismatch triggers severe negative transfer between visually similar but logically distinct tasks and fails to exploit alignment reuse across visually diverse ones. We argue thatalignment sharing is fundamentally a geometric problem of overlapping optimization trajectories within shared low-rank subspaces. Grounded in this insight, we propose iGSP, a novel framework that achieves efficient adaptation via implicit gradient subspace projection. Leveraging the early convergence of MoE routers to establish the subspace basis, iGSP bifurcates the adaptation process into two phases. First, the Subspace Identification phase introduces candidate experts via basis pre-expansion, applies a novel subspace-constrained regularization to implicitly project new task gradients onto the historical subspace, and precisely prunes redundant dimensions by treating routing probabilities as gradient flow indicators, ultimately to maximize knowledge reuse. Second, the Orthogonal Subspace Fine-Tuning phase fixes this structural basis and removes the regularization to rapidly fit the task-specific residual loss. Extensive experiments on the MTIL benchmark demonstrate that iGSP achieves state-of-the-art accuracy while significantly improving training efficiency, reducing the average trainable parameters by 42.7\% compared to current SOTA methods, and decreasing the final total parameters by 86.9\% relative to counterparts. The source code is available at https://github.com/GeoX-Lab/iGSP.
Dynamic Frequency Modulation for Controllable Text-driven Image Generation
Feb 11, 2026The success of text-guided diffusion models has established a new image generation paradigm driven by the iterative refinement of text prompts. However, modifying the original text prompt to achieve the expected semantic adjustments often results in unintended global structure changes that disrupt user intent. Existing methods rely on empirical feature map selection for intervention, whose performance heavily depends on appropriate selection, leading to suboptimal stability. This paper tries to solve the aforementioned problem from a frequency perspective and analyzes the impact of the frequency spectrum of noisy latent variables on the hierarchical emergence of the structure framework and fine-grained textures during the generation process. We find that lower-frequency components are primarily responsible for establishing the structure framework in the early generation stage. Their influence diminishes over time, giving way to higher-frequency components that synthesize fine-grained textures. In light of this, we propose a training-free frequency modulation method utilizing a frequency-dependent weighting function with dynamic decay. This method maintains the structure framework consistency while permitting targeted semantic modifications. By directly manipulating the noisy latent variable, the proposed method avoids the empirical selection of internal feature maps. Extensive experiments demonstrate that the proposed method significantly outperforms current state-of-the-art methods, achieving an effective balance between preserving structure and enabling semantic updates.
Causal invariant geographic network representations with feature and structural distribution shifts
Mar 25, 2025The existing methods learn geographic network representations through deep graph neural networks (GNNs) based on the i.i.d. assumption. However, the spatial heterogeneity and temporal dynamics of geographic data make the out-of-distribution (OOD) generalisation problem particularly salient. The latter are particularly sensitive to distribution shifts (feature and structural shifts) between testing and training data and are the main causes of the OOD generalisation problem. Spurious correlations are present between invariant and background representations due to selection biases and environmental effects, resulting in the model extremes being more likely to learn background representations. The existing approaches focus on background representation changes that are determined by shifts in the feature distributions of nodes in the training and test data while ignoring changes in the proportional distributions of heterogeneous and homogeneous neighbour nodes, which we refer to as structural distribution shifts. We propose a feature-structure mixed invariant representation learning (FSM-IRL) model that accounts for both feature distribution shifts and structural distribution shifts. To address structural distribution shifts, we introduce a sampling method based on causal attention, encouraging the model to identify nodes possessing strong causal relationships with labels or nodes that are more similar to the target node. Inspired by the Hilbert-Schmidt independence criterion, we implement a reweighting strategy to maximise the orthogonality of the node representations, thereby mitigating the spurious correlations among the node representations and suppressing the learning of background representations. Our experiments demonstrate that FSM-IRL exhibits strong learning capabilities on both geographic and social network datasets in OOD scenarios.
* 15 pages, 3 figures, 8 tables
Dexterous Hand Manipulation via Efficient Imitation-Bootstrapped Online Reinforcement Learning
Mar 06, 2025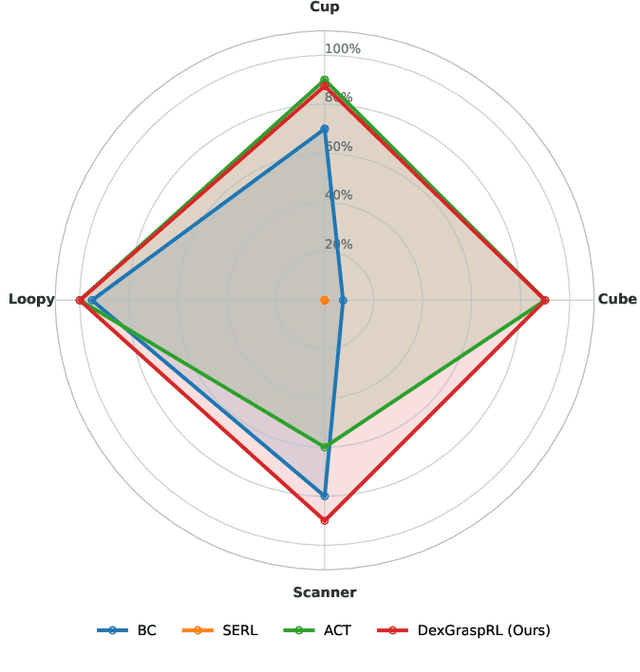
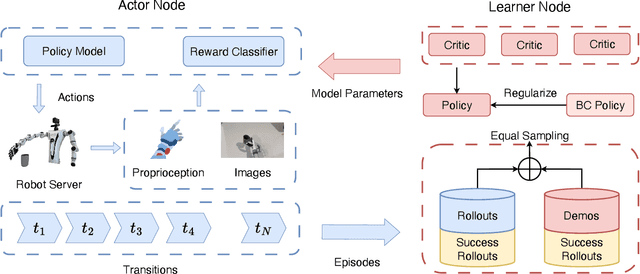
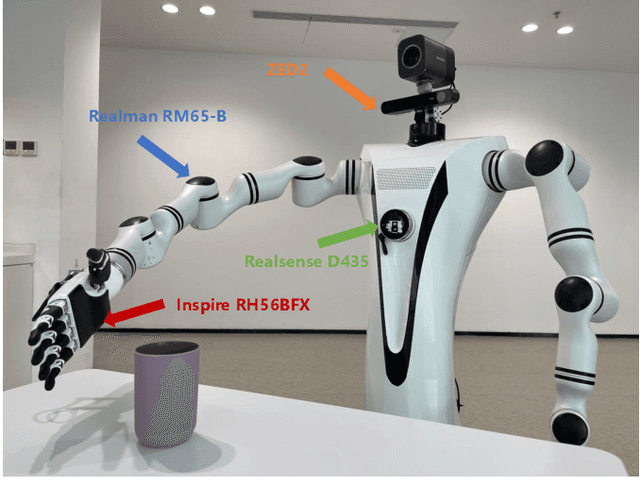
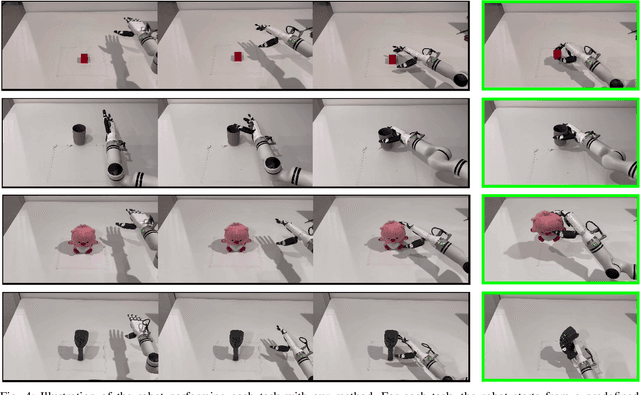
Dexterous hand manipulation in real-world scenarios presents considerable challenges due to its demands for both dexterity and precision. While imitation learning approaches have thoroughly examined these challenges, they still require a significant number of expert demonstrations and are limited by a constrained performance upper bound. In this paper, we propose a novel and efficient Imitation-Bootstrapped Online Reinforcement Learning (IBORL) method tailored for robotic dexterous hand manipulation in real-world environments. Specifically, we pretrain the policy using a limited set of expert demonstrations and subsequently finetune this policy through direct reinforcement learning in the real world. To address the catastrophic forgetting issues that arise from the distribution shift between expert demonstrations and real-world environments, we design a regularization term that balances the exploration of novel behaviors with the preservation of the pretrained policy. Our experiments with real-world tasks demonstrate that our method significantly outperforms existing approaches, achieving an almost 100% success rate and a 23% improvement in cycle time. Furthermore, by finetuning with online reinforcement learning, our method surpasses expert demonstrations and uncovers superior policies. Our code and empirical results are available in https://hggforget.github.io/iborl.github.io/.
SeFi-CD: A Semantic First Change Detection Paradigm That Can Detect Any Change You Want
Jul 13, 2024



The existing change detection(CD) methods can be summarized as the visual-first change detection (ViFi-CD) paradigm, which first extracts change features from visual differences and then assigns them specific semantic information. However, CD is essentially dependent on change regions of interest (CRoIs), meaning that the CD results are directly determined by the semantics changes of interest, making its primary image factor semantic of interest rather than visual. The ViFi-CD paradigm can only assign specific semantics of interest to specific change features extracted from visual differences, leading to the inevitable omission of potential CRoIs and the inability to adapt to different CRoI CD tasks. In other words, changes in other CRoIs cannot be detected by the ViFi-CD method without retraining the model or significantly modifying the method. This paper introduces a new CD paradigm, the semantic-first CD (SeFi-CD) paradigm. The core idea of SeFi-CD is to first perceive the dynamic semantics of interest and then visually search for change features related to the semantics. Based on the SeFi-CD paradigm, we designed Anything You Want Change Detection (AUWCD). Experiments on public datasets demonstrate that the AUWCD outperforms the current state-of-the-art CD methods, achieving an average F1 score 5.01\% higher than that of these advanced supervised baselines on the SECOND dataset, with a maximum increase of 13.17\%. The proposed SeFi-CD offers a novel CD perspective and approach.
Improving Rehabilitative Assessment with Statistical and Shape Preserving Surrogate Data and Singular Spectrum Analysis
Jun 22, 2024



Time series data are collected in temporal order and are widely used to train systems for prediction, modeling and classification to name a few. These systems require large amounts of data to improve generalization and prevent over-fitting. However there is a comparative lack of time series data due to operational constraints. This situation is alleviated by synthesizing data which have a suitable spread of features yet retain the distinctive features of the original data. These would be its basic statistical properties and overall shape which are important for short time series such as in rehabilitative applications or in quickly changing portions of lengthy data. In our earlier work synthesized surrogate time series were used to augment rehabilitative data. This gave good results in classification but the resulting waveforms did not preserve the original signal shape. To remedy this, we use singular spectrum analysis (SSA) to separate a signal into trends and cycles to describe the shape of the signal and low level components. In a novel way we subject the low level component to randomizing processes then recombine this with the original trend and cycle components to form a synthetic time series. We compare our approach with other methods, using statistical and shape measures and demonstrate its effectiveness in classification.
* This version of the paper under the same title, acknowledges the data source and the funding for current research using this data. arXiv admin note: substantial text overlap with arXiv:2404.14211
RS-GPT4V: A Unified Multimodal Instruction-Following Dataset for Remote Sensing Image Understanding
Jun 18, 2024The remote sensing image intelligence understanding model is undergoing a new profound paradigm shift which has been promoted by multi-modal large language model (MLLM), i.e. from the paradigm learning a domain model (LaDM) shifts to paradigm learning a pre-trained general foundation model followed by an adaptive domain model (LaGD). Under the new LaGD paradigm, the old datasets, which have led to advances in RSI intelligence understanding in the last decade, are no longer suitable for fire-new tasks. We argued that a new dataset must be designed to lighten tasks with the following features: 1) Generalization: training model to learn shared knowledge among tasks and to adapt to different tasks; 2) Understanding complex scenes: training model to understand the fine-grained attribute of the objects of interest, and to be able to describe the scene with natural language; 3) Reasoning: training model to be able to realize high-level visual reasoning. In this paper, we designed a high-quality, diversified, and unified multimodal instruction-following dataset for RSI understanding produced by GPT-4V and existing datasets, which we called RS-GPT4V. To achieve generalization, we used a (Question, Answer) which was deduced from GPT-4V via instruction-following to unify the tasks such as captioning and localization; To achieve complex scene, we proposed a hierarchical instruction description with local strategy in which the fine-grained attributes of the objects and their spatial relationships are described and global strategy in which all the local information are integrated to yield detailed instruction descript; To achieve reasoning, we designed multiple-turn QA pair to provide the reasoning ability for a model. The empirical results show that the fine-tuned MLLMs by RS-GPT4V can describe fine-grained information. The dataset is available at: https://github.com/GeoX-Lab/RS-GPT4V.
CAT: A Causally Graph Attention Network for Trimming Heterophilic Graph
Dec 15, 2023
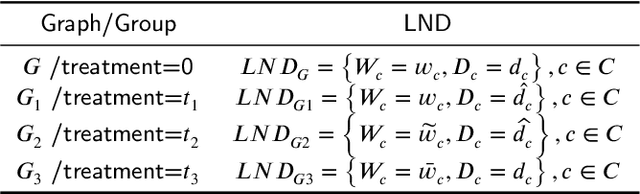
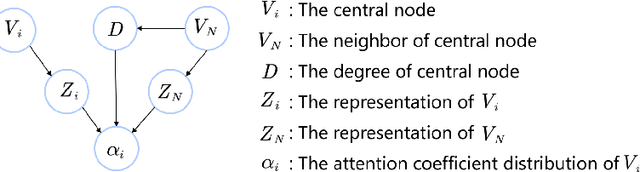
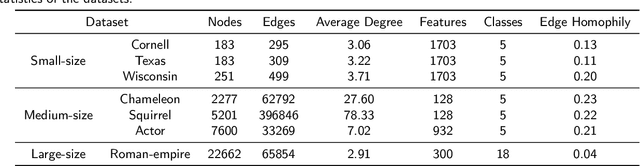
Local Attention-guided Message Passing Mechanism (LAMP) adopted in Graph Attention Networks (GATs) is designed to adaptively learn the importance of neighboring nodes for better local aggregation on the graph, which can bring the representations of similar neighbors closer effectively, thus showing stronger discrimination ability. However, existing GATs suffer from a significant discrimination ability decline in heterophilic graphs because the high proportion of dissimilar neighbors can weaken the self-attention of the central node, jointly resulting in the deviation of the central node from similar nodes in the representation space. This kind of effect generated by neighboring nodes is called the Distraction Effect (DE) in this paper. To estimate and weaken the DE of neighboring nodes, we propose a Causally graph Attention network for Trimming heterophilic graph (CAT). To estimate the DE, since the DE are generated through two paths (grab the attention assigned to neighbors and reduce the self-attention of the central node), we use Total Effect to model DE, which is a kind of causal estimand and can be estimated from intervened data; To weaken the DE, we identify the neighbors with the highest DE (we call them Distraction Neighbors) and remove them. We adopt three representative GATs as the base model within the proposed CAT framework and conduct experiments on seven heterophilic datasets in three different sizes. Comparative experiments show that CAT can improve the node classification accuracy of all base GAT models. Ablation experiments and visualization further validate the enhancement of discrimination ability brought by CAT. The source code is available at https://github.com/GeoX-Lab/CAT.
* 24 pages, 17 figures, 4 tables
Deep Double Self-Expressive Subspace Clustering
Jun 20, 2023Deep subspace clustering based on auto-encoder has received wide attention. However, most subspace clustering based on auto-encoder does not utilize the structural information in the self-expressive coefficient matrix, which limits the clustering performance. In this paper, we propose a double self-expressive subspace clustering algorithm. The key idea of our solution is to view the self-expressive coefficient as a feature representation of the example to get another coefficient matrix. Then, we use the two coefficient matrices to construct the affinity matrix for spectral clustering. We find that it can reduce the subspace-preserving representation error and improve connectivity. To further enhance the clustering performance, we proposed a self-supervised module based on contrastive learning, which can further improve the performance of the trained network. Experiments on several benchmark datasets demonstrate that the proposed algorithm can achieve better clustering than state-of-the-art methods.
STGC-GNNs: A GNN-based traffic prediction framework with a spatial-temporal Granger causality graph
Oct 30, 2022



The key to traffic prediction is to accurately depict the temporal dynamics of traffic flow traveling in a road network, so it is important to model the spatial dependence of the road network. The essence of spatial dependence is to accurately describe how traffic information transmission is affected by other nodes in the road network, and the GNN-based traffic prediction model, as a benchmark for traffic prediction, has become the most common method for the ability to model spatial dependence by transmitting traffic information with the message passing mechanism. However, existing methods model a local and static spatial dependence, which cannot transmit the global-dynamic traffic information (GDTi) required for long-term prediction. The challenge is the difficulty of detecting the precise transmission of GDTi due to the uncertainty of individual transport, especially for long-term transmission. In this paper, we propose a new hypothesis\: GDTi behaves macroscopically as a transmitting causal relationship (TCR) underlying traffic flow, which remains stable under dynamic changing traffic flow. We further propose spatial-temporal Granger causality (STGC) to express TCR, which models global and dynamic spatial dependence. To model global transmission, we model the causal order and causal lag of TCRs global transmission by a spatial-temporal alignment algorithm. To capture dynamic spatial dependence, we approximate the stable TCR underlying dynamic traffic flow by a Granger causality test. The experimental results on three backbone models show that using STGC to model the spatial dependence has better results than the original model for 45 min and 1 h long-term prediction.