 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Curriculum Model-based Reinforcement Learning for Shape Control of Deformable Linear Objects
Feb 25, 2026Precise shape control of Deformable Linear Objects (DLOs) is crucial in robotic applications such as industrial and medical fields. However, existing methods face challenges in handling complex large deformation tasks, especially those involving opposite curvatures, and lack efficiency and precision. To address this, we propose a two-stage framework combining Reinforcement Learning (RL) and online visual servoing. In the large-deformation stage, a model-based reinforcement learning approach using an ensemble of dynamics models is introduced to significantly improve sample efficiency. Additionally, we design a self-curriculum goal generation mechanism that dynamically selects intermediate-difficulty goals with high diversity through imagined evaluations, thereby optimizing the policy learning process. In the small-deformation stage, a Jacobian-based visual servo controller is deployed to ensure high-precision convergence. Simulation results show that the proposed method enables efficient policy learning and significantly outperforms mainstream baselines in shape control success rate and precision. Furthermore, the framework effectively transfers the policy trained in simulation to real-world tasks with zero-shot adaptation. It successfully completes all 30 cases with diverse initial and target shapes across DLOs of different sizes and materials. The project website is available at: https://anonymous.4open.science/w/sc-mbrl-dlo-EB48/
HyperVL: An Efficient and Dynamic Multimodal Large Language Model for Edge Devices
Dec 16, 2025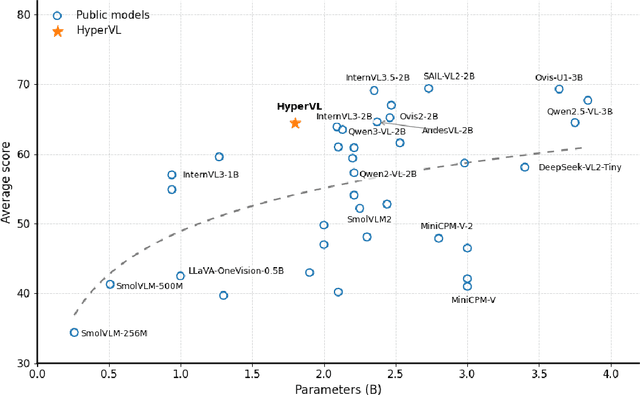

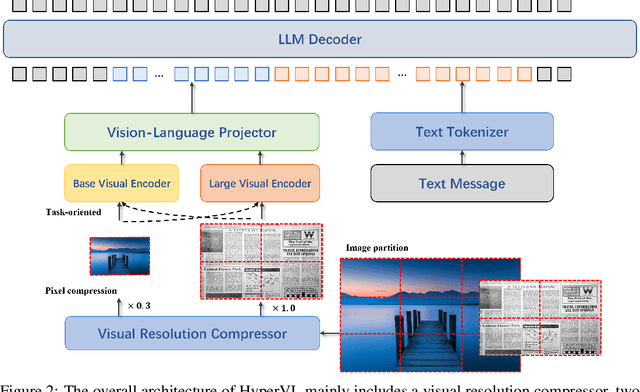
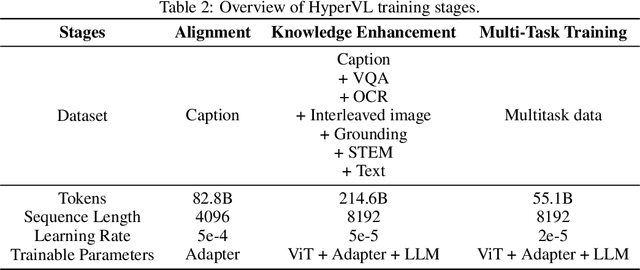
Current multimodal large lanauge models possess strong perceptual and reasoning capabilities, however high computational and memory requirements make them difficult to deploy directly on on-device environments. While small-parameter models are progressively endowed with strong general capabilities, standard Vision Transformer (ViT) encoders remain a critical bottleneck, suffering from excessive latency and memory consumption when processing high-resolution inputs.To address these challenges, we introduce HyperVL, an efficient multimodal large language model tailored for on-device inference. HyperVL adopts an image-tiling strategy to cap peak memory usage and incorporates two novel techniques: (1) a Visual Resolution Compressor (VRC) that adaptively predicts optimal encoding resolutions to eliminate redundant computation, and (2) Dual Consistency Learning (DCL), which aligns multi-scale ViT encoders within a unified framework, enabling dynamic switching between visual branches under a shared LLM. Extensive experiments demonstrate that HyperVL achieves state-of-the-art performance among models of comparable size across multiple benchmarks. Furthermore, it significantly significantly reduces latency and power consumption on real mobile devices, demonstrating its practicality for on-device multimodal inference.
Local Collaborative Filtering: A Collaborative Filtering Method that Utilizes Local Similarities among Users
Nov 17, 2025To leverage user behavior data from the Internet more effectively in recommender systems, this paper proposes a novel collaborative filtering (CF) method called Local Collaborative Filtering (LCF). LCF utilizes local similarities among users and integrates their data using the law of large numbers (LLN), thereby improving the utilization of user behavior data. Experiments are conducted on the Steam game dataset, and the results of LCF align with real-world needs.
Connectivity-Guided Sparsification of 2-FWL GNNs: Preserving Full Expressivity with Improved Efficiency
Nov 16, 2025



Higher-order Graph Neural Networks (HOGNNs) based on the 2-FWL test achieve superior expressivity by modeling 2- and 3-node interactions, but at $\mathcal{O}(n^3)$ computational cost. However, this computational burden is typically mitigated by existing efficiency methods at the cost of reduced expressivity. We propose \textbf{Co-Sparsify}, a connectivity-aware sparsification framework that eliminates \emph{provably redundant} computations while preserving full 2-FWL expressive power. Our key insight is that 3-node interactions are expressively necessary only within \emph{biconnected components} -- maximal subgraphs where every pair of nodes lies on a cycle. Outside these components, structural relationships can be fully captured via 2-node message passing or global readout, rendering higher-order modeling unnecessary. Co-Sparsify restricts 2-node message passing to connected components and 3-node interactions to biconnected ones, removing computation without approximation or sampling. We prove that Co-Sparsified GNNs are as expressive as the 2-FWL test. Empirically, on PPGN, Co-Sparsify matches or exceeds accuracy on synthetic substructure counting tasks and achieves state-of-the-art performance on real-world benchmarks (ZINC, QM9). This study demonstrates that high expressivity and scalability are not mutually exclusive: principled, topology-guided sparsification enables powerful, efficient GNNs with theoretical guarantees.
A robust and compliant robotic assembly control strategy for batch precision assembly task with uncertain fit types and fit amounts
Aug 17, 2025In some high-precision industrial applications, robots are deployed to perform precision assembly tasks on mass batches of manufactured pegs and holes. If the peg and hole are designed with transition fit, machining errors may lead to either a clearance or an interference fit for a specific pair of components, with uncertain fit amounts. This paper focuses on the robotic batch precision assembly task involving components with uncertain fit types and fit amounts, and proposes an efficient methodology to construct the robust and compliant assembly control strategy. Specifically, the batch precision assembly task is decomposed into multiple deterministic subtasks, and a force-vision fusion controller-driven reinforcement learning method and a multi-task reinforcement learning training method (FVFC-MTRL) are proposed to jointly learn multiple compliance control strategies for these subtasks. Subsequently, the multi-teacher policy distillation approach is designed to integrate multiple trained strategies into a unified student network, thereby establishing a robust control strategy. Real-world experiments demonstrate that the proposed method successfully constructs the robust control strategy for high-precision assembly task with different fit types and fit amounts. Moreover, the MTRL framework significantly improves training efficiency, and the final developed control strategy achieves superior force compliance and higher success rate compared with many existing methods.
Multivariate Long-term Time Series Forecasting with Fourier Neural Filter
Jun 10, 2025Multivariate long-term time series forecasting has been suffering from the challenge of capturing both temporal dependencies within variables and spatial correlations across variables simultaneously. Current approaches predominantly repurpose backbones from natural language processing or computer vision (e.g., Transformers), which fail to adequately address the unique properties of time series (e.g., periodicity). The research community lacks a dedicated backbone with temporal-specific inductive biases, instead relying on domain-agnostic backbones supplemented with auxiliary techniques (e.g., signal decomposition). We introduce FNF as the backbone and DBD as the architecture to provide excellent learning capabilities and optimal learning pathways for spatio-temporal modeling, respectively. Our theoretical analysis proves that FNF unifies local time-domain and global frequency-domain information processing within a single backbone that extends naturally to spatial modeling, while information bottleneck theory demonstrates that DBD provides superior gradient flow and representation capacity compared to existing unified or sequential architectures. Our empirical evaluation across 11 public benchmark datasets spanning five domains (energy, meteorology, transportation, environment, and nature) confirms state-of-the-art performance with consistent hyperparameter settings. Notably, our approach achieves these results without any auxiliary techniques, suggesting that properly designed neural architectures can capture the inherent properties of time series, potentially transforming time series modeling in scientific and industrial applications.
AllTact Fin Ray: A Compliant Robot Gripper with Omni-Directional Tactile Sensing
Apr 25, 2025



Tactile sensing plays a crucial role in robot grasping and manipulation by providing essential contact information between the robot and the environment. In this paper, we present AllTact Fin Ray, a novel compliant gripper design with omni-directional and local tactile sensing capabilities. The finger body is unibody-casted using transparent elastic silicone, and a camera positioned at the base of the finger captures the deformation of the whole body and the contact face. Due to the global deformation of the adaptive structure, existing vision-based tactile sensing approaches that assume constant illumination are no longer applicable. To address this, we propose a novel sensing method where the global deformation is first reconstructed from the image using edge features and spatial constraints. Then, detailed contact geometry is computed from the brightness difference against a dynamically retrieved reference image. Extensive experiments validate the effectiveness of our proposed gripper design and sensing method in contact detection, force estimation, object grasping, and precise manipulation.
ThinTact:Thin Vision-Based Tactile Sensor by Lensless Imaging
Jan 16, 2025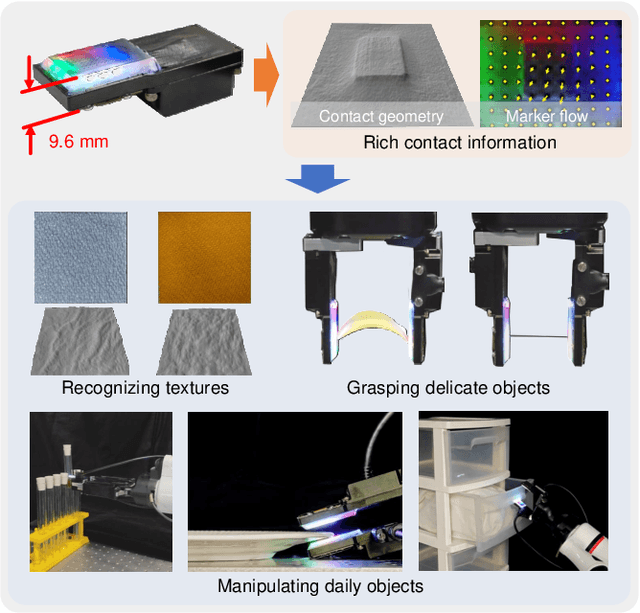
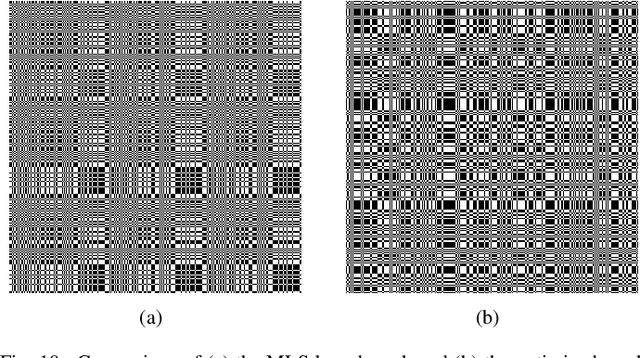
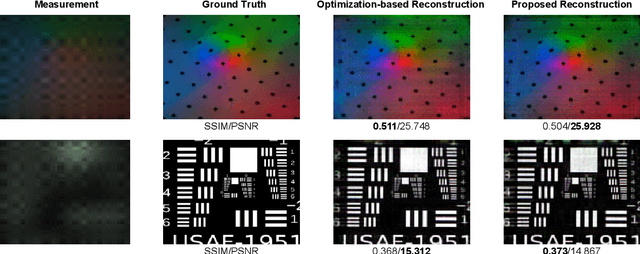
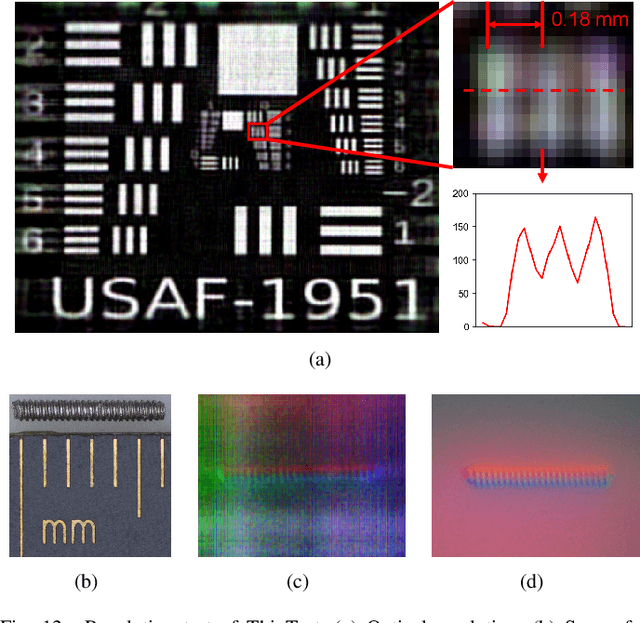
Vision-based tactile sensors have drawn increasing interest in the robotics community. However, traditional lens-based designs impose minimum thickness constraints on these sensors, limiting their applicability in space-restricted settings. In this paper, we propose ThinTact, a novel lensless vision-based tactile sensor with a sensing field of over 200 mm2 and a thickness of less than 10 mm.ThinTact utilizes the mask-based lensless imaging technique to map the contact information to CMOS signals. To ensure real-time tactile sensing, we propose a real-time lensless reconstruction algorithm that leverages a frequency-spatial-domain joint filter based on discrete cosine transform (DCT). This algorithm achieves computation significantly faster than existing optimization-based methods. Additionally, to improve the sensing quality, we develop a mask optimization method based on the generic algorithm and the corresponding system matrix calibration algorithm.We evaluate the performance of our proposed lensless reconstruction and tactile sensing through qualitative and quantitative experiments. Furthermore, we demonstrate ThinTact's practical applicability in diverse applications, including texture recognition and contact-rich object manipulation. The paper will appear in the IEEE Transactions on Robotics: https://ieeexplore.ieee.org/document/10842357. Video: https://youtu.be/YrOO9BDMAHo
AtlasSeg: Atlas Prior Guided Dual-U-Net for Cortical Segmentation in Fetal Brain MRI
Nov 05, 2024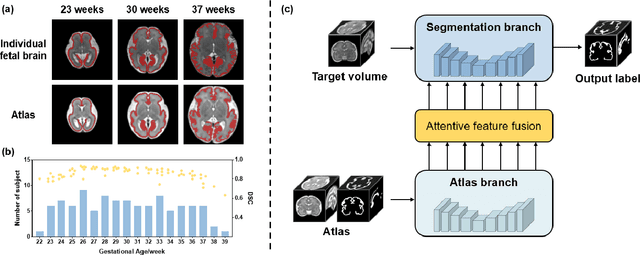
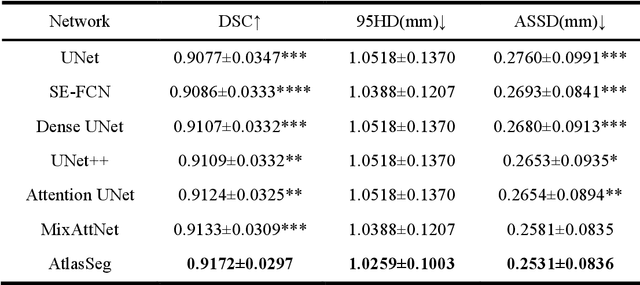
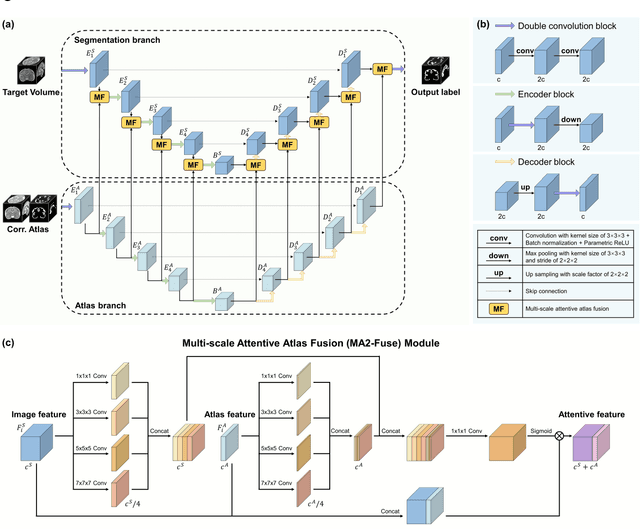
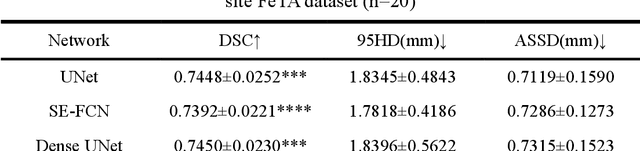
Accurate tissue segmentation in fetal brain MRI remains challenging due to the dynamically changing anatomical anatomy and contrast during fetal development. To enhance segmentation accuracy throughout gestation, we introduced AtlasSeg, a dual-U-shape convolution network incorporating gestational age (GA) specific information as guidance. By providing a publicly available fetal brain atlas with segmentation label at the corresponding GA, AtlasSeg effectively extracted the contextual features of age-specific patterns in atlas branch and generated tissue segmentation in segmentation branch. Multi-scale attentive atlas feature fusions were constructed in all stages during encoding and decoding, giving rise to a dual-U-shape network to assist feature flow and information interactions between two branches. AtlasSeg outperformed six well-known segmentation networks in both our internal fetal brain MRI dataset and the external FeTA dataset. Ablation experiments demonstrate the efficiency of atlas guidance and the attention mechanism. The proposed AtlasSeg demonstrated superior segmentation performance against other convolution networks with higher segmentation accuracy, and may facilitate fetal brain MRI analysis in large-scale fetal brain studies.
DexSim2Real$^{2}$: Building Explicit World Model for Precise Articulated Object Dexterous Manipulation
Sep 13, 2024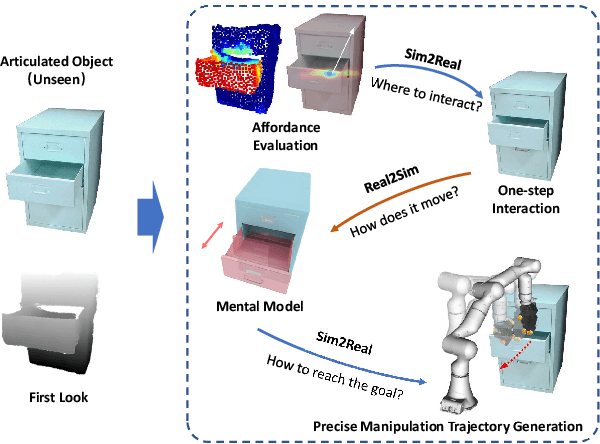
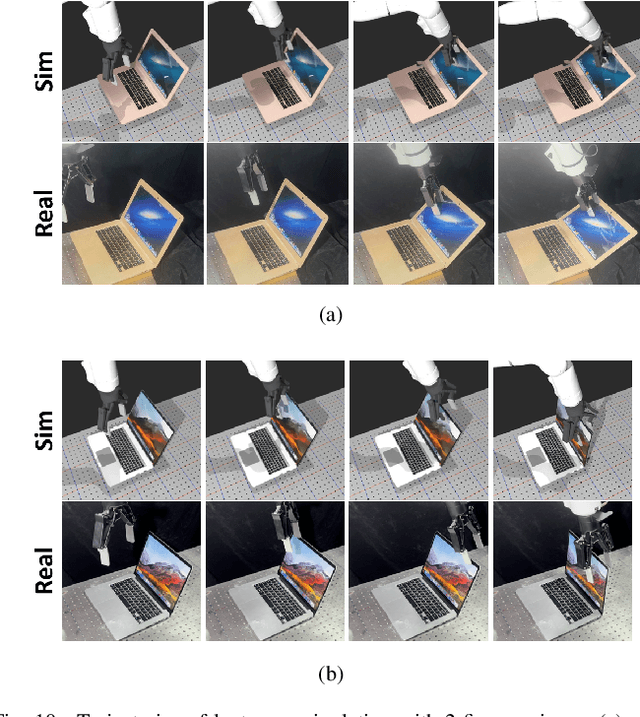
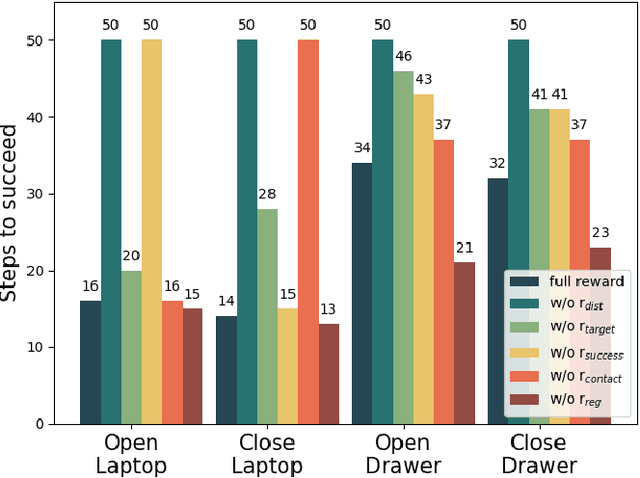
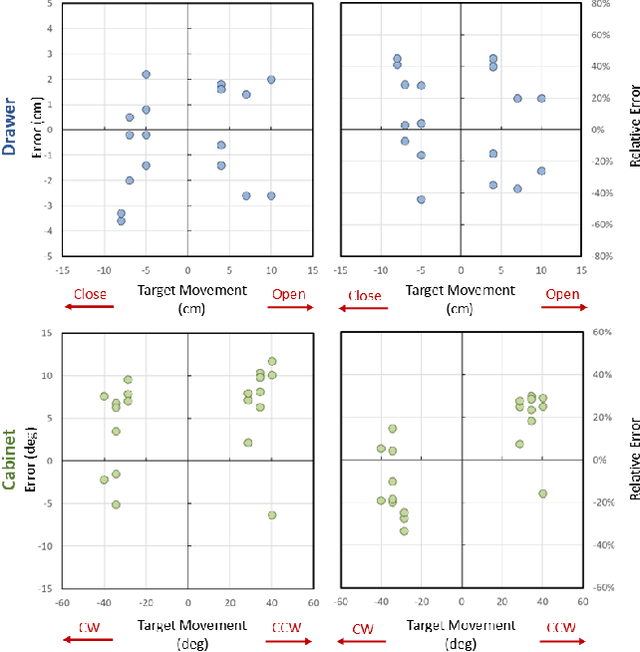
Articulated object manipulation is ubiquitous in daily life. In this paper, we present DexSim2Real$^{2}$, a novel robot learning framework for goal-conditioned articulated object manipulation using both two-finger grippers and multi-finger dexterous hands. The key of our framework is constructing an explicit world model of unseen articulated objects through active one-step interactions. This explicit world model enables sampling-based model predictive control to plan trajectories achieving different manipulation goals without needing human demonstrations or reinforcement learning. It first predicts an interaction motion using an affordance estimation network trained on self-supervised interaction data or videos of human manipulation from the internet. After executing this interaction on the real robot, the framework constructs a digital twin of the articulated object in simulation based on the two point clouds before and after the interaction. For dexterous multi-finger manipulation, we propose to utilize eigengrasp to reduce the high-dimensional action space, enabling more efficient trajectory searching. Extensive experiments validate the framework's effectiveness for precise articulated object manipulation in both simulation and the real world using a two-finger gripper and a 16-DoF dexterous hand. The robust generalizability of the explicit world model also enables advanced manipulation strategies, such as manipulating with different tools.