 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR-C-P Method: An Autonomous Volume Calculation Method Using Image Processing and Machine Vision
Aug 19, 2023



Machine vision and image processing are often used with sensors for situation awareness in autonomous systems, from industrial robots to self-driving cars. The 3D depth sensors, such as LiDAR (Light Detection and Ranging), Radar, are great invention for autonomous systems. Due to the complexity of the setup, LiDAR may not be suitable for some operational environments, for example, a space environment. This study was motivated by a desire to get real-time volumetric and change information with multiple 2D cameras instead of a depth camera. Two cameras were used to measure the dimensions of a rectangular object in real-time. The R-C-P (row-column-pixel) method is developed using image processing and edge detection. In addition to the surface areas, the R-C-P method also detects discontinuous edges or volumes. Lastly, experimental work is presented for illustration of the R-C-P method, which provides the equations for calculating surface area dimensions. Using the equations with given distance information between the object and the camera, the vision system provides the dimensions of actual objects.
A Motion Assessment Method for Reference Stack Selection in Fetal Brain MRI Reconstruction Based on Tensor Rank Approximation
Jun 30, 2023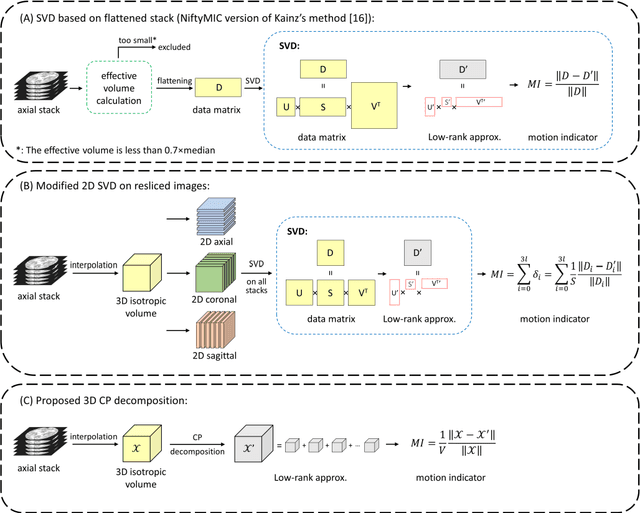
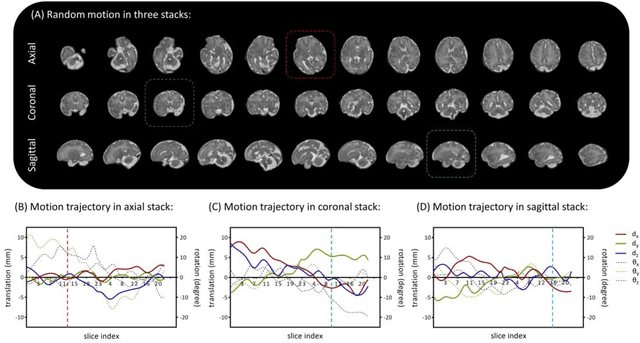
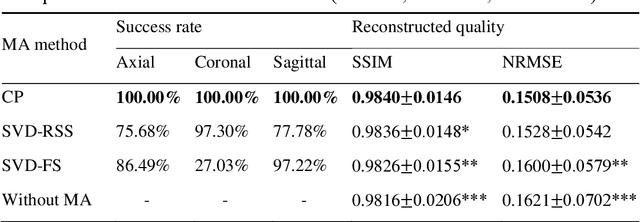
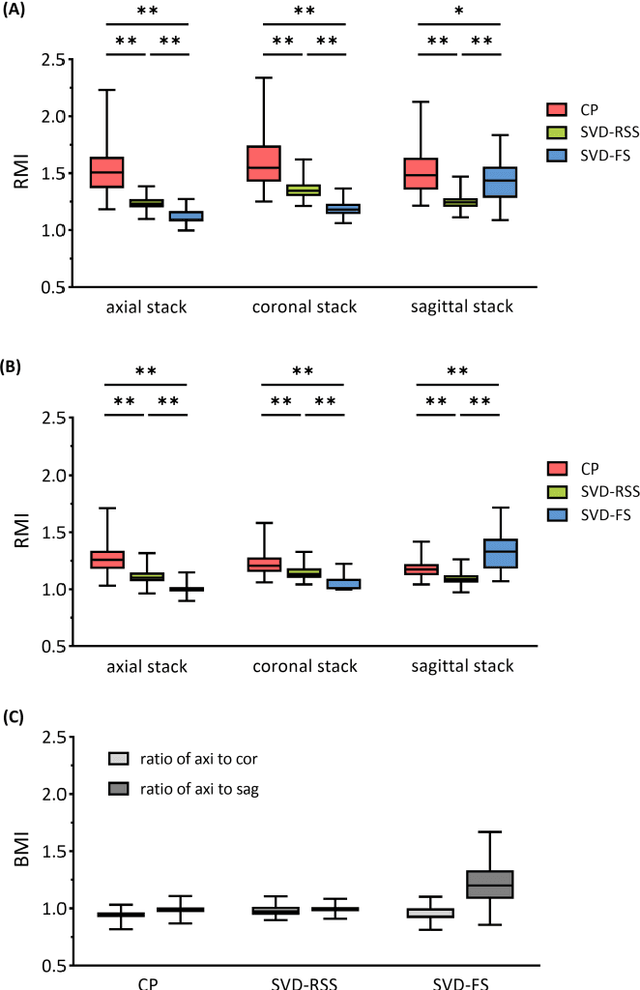
Purpose: Slice-to-volume registration and super-resolution reconstruction (SVR-SRR) is commonly used to generate 3D volumes of the fetal brain from 2D stacks of slices acquired in multiple orientations. A critical initial step in this pipeline is to select one stack with the minimum motion as a reference for registration. An accurate and unbiased motion assessment (MA) is thus crucial for successful selection. Methods: We presented a MA method that determines the minimum motion stack based on 3D low-rank approximation using CANDECOMP/PARAFAC (CP) decomposition. Compared to the current 2D singular value decomposition (SVD) based method that requires flattening stacks into matrices to obtain ranks, in which the spatial information is lost, the CP-based method can factorize 3D stack into low-rank and sparse components in a computationally efficient manner. The difference between the original stack and its low-rank approximation was proposed as the motion indicator. Results: Compared to SVD-based methods, our proposed CP-based MA demonstrated higher sensitivity in detecting small motion with a lower baseline bias. Experiments on randomly simulated motion illustrated that the proposed CP method achieved a higher success rate of 95.45% in identifying the minimum motion stack, compared to SVD-based method with a success rate of 58.18%. We further demonstrated that combining CP-based MA with existing SRR-SVR pipeline significantly improved 3D volume reconstruction. Conclusion: The proposed CP-based MA method showed superior performance compared to SVD-based methods with higher sensitivity to motion, success rate, and lower baseline bias, and can be used as a prior step to improve fetal brain reconstruction.
SigSegment: A Signal-Based Segmentation Algorithm for Identifying Anomalous Driving Behaviours in Naturalistic Driving Videos
Apr 13, 2023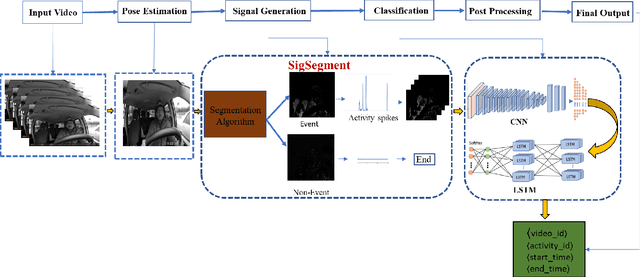
In recent years, distracted driving has garnered considerable attention as it continues to pose a significant threat to public safety on the roads. This has increased the need for innovative solutions that can identify and eliminate distracted driving behavior before it results in fatal accidents. In this paper, we propose a Signal-Based anomaly detection algorithm that segments videos into anomalies and non-anomalies using a deep CNN-LSTM classifier to precisely estimate the start and end times of an anomalous driving event. In the phase of anomaly detection and analysis, driver pose background estimation, mask extraction, and signal activity spikes are utilized. A Deep CNN-LSTM classifier was applied to candidate anomalies to detect and classify final anomalies. The proposed method achieved an overlap score of 0.5424 and ranked 9th on the public leader board in the AI City Challenge 2023, according to experimental validation results.
Travel Time, Distance and Costs Optimization for Paratransit Operations using Graph Convolutional Neural Network
May 21, 2022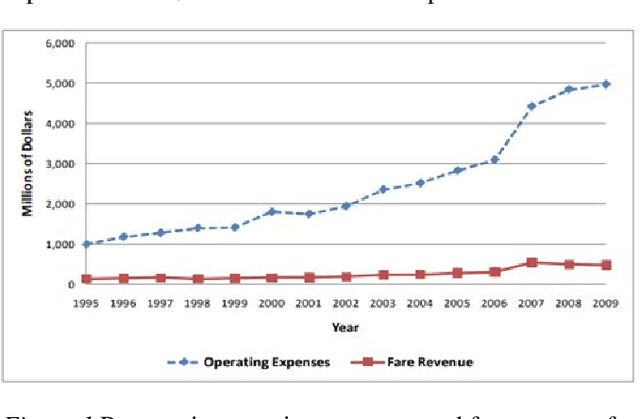
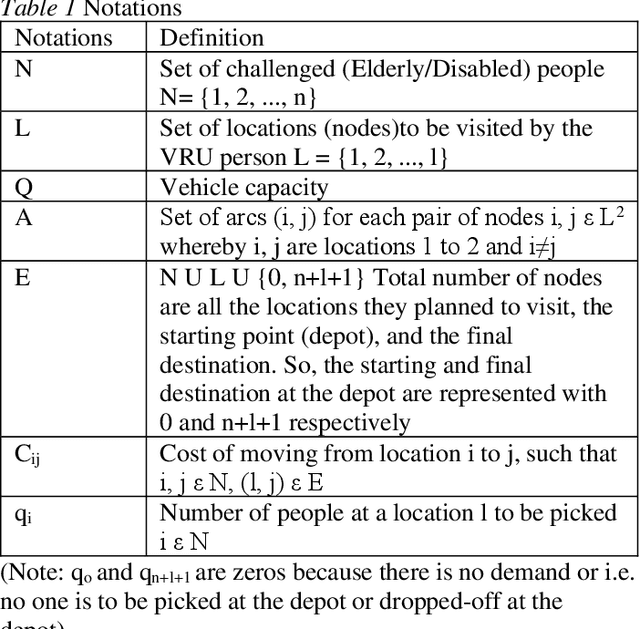
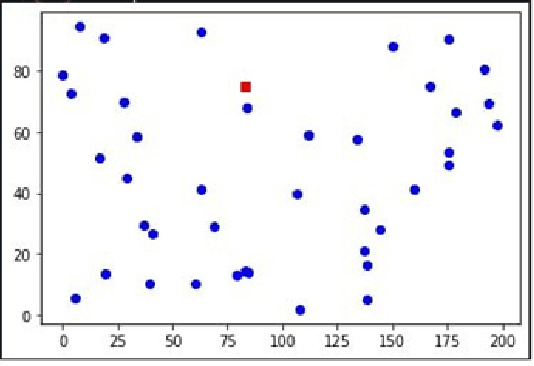
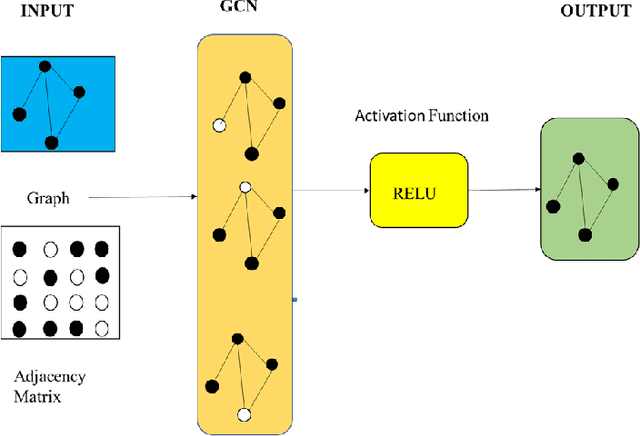
The provision of paratransit services is one option to meet the transportation needs of Vulnerable Road Users (VRUs). Like any other means of transportation, paratransit has obstacles such as high operational costs and longer trip times. As a result, customers are dissatisfied, and paratransit operators have a low approval rating. Researchers have undertaken various studies over the years to better understand the travel behaviors of paratransit customers and how they are operated. According to the findings of these researches, paratransit operators confront the challenge of determining the optimal route for their trips in order to save travel time. Depending on the nature of the challenge, most research used different optimization techniques to solve these routing problems. As a result, the goal of this study is to use Graph Convolutional Neural Networks (GCNs) to assist paratransit operators in researching various operational scenarios in a strategic setting in order to optimize routing, minimize operating costs and minimize their users' travel time. The study was carried out by using a randomized simulated dataset to help determine the decision to make in terms of fleet composition and capacity under different situations. For the various scenarios investigated, the GCN assisted in determining the minimum optimal gap.