 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAllTact Fin Ray: A Compliant Robot Gripper with Omni-Directional Tactile Sensing
Apr 25, 2025



Tactile sensing plays a crucial role in robot grasping and manipulation by providing essential contact information between the robot and the environment. In this paper, we present AllTact Fin Ray, a novel compliant gripper design with omni-directional and local tactile sensing capabilities. The finger body is unibody-casted using transparent elastic silicone, and a camera positioned at the base of the finger captures the deformation of the whole body and the contact face. Due to the global deformation of the adaptive structure, existing vision-based tactile sensing approaches that assume constant illumination are no longer applicable. To address this, we propose a novel sensing method where the global deformation is first reconstructed from the image using edge features and spatial constraints. Then, detailed contact geometry is computed from the brightness difference against a dynamically retrieved reference image. Extensive experiments validate the effectiveness of our proposed gripper design and sensing method in contact detection, force estimation, object grasping, and precise manipulation.
ThinTact:Thin Vision-Based Tactile Sensor by Lensless Imaging
Jan 16, 2025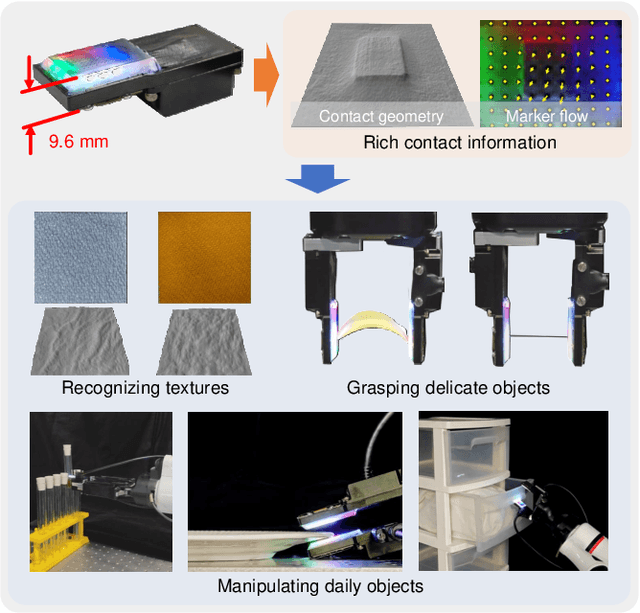
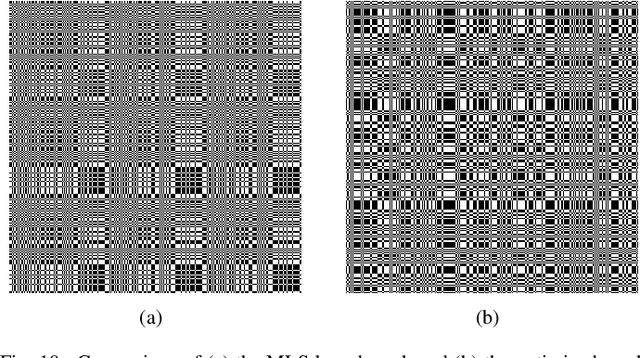
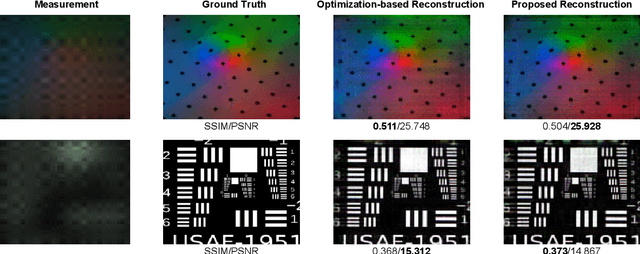
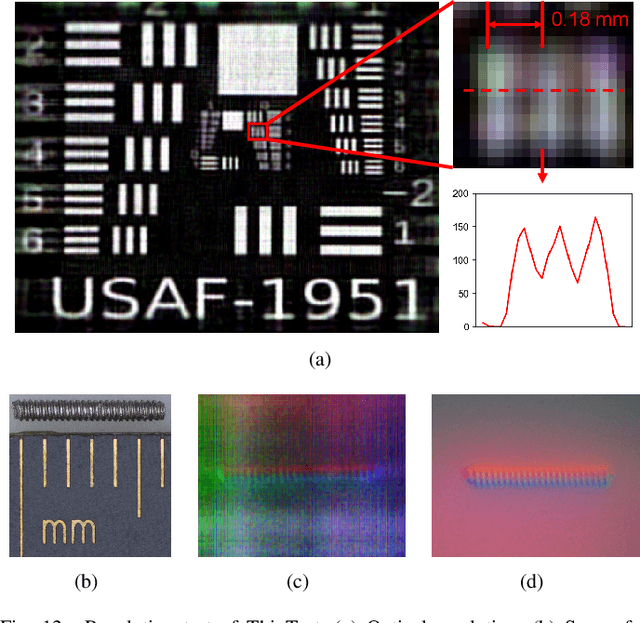
Vision-based tactile sensors have drawn increasing interest in the robotics community. However, traditional lens-based designs impose minimum thickness constraints on these sensors, limiting their applicability in space-restricted settings. In this paper, we propose ThinTact, a novel lensless vision-based tactile sensor with a sensing field of over 200 mm2 and a thickness of less than 10 mm.ThinTact utilizes the mask-based lensless imaging technique to map the contact information to CMOS signals. To ensure real-time tactile sensing, we propose a real-time lensless reconstruction algorithm that leverages a frequency-spatial-domain joint filter based on discrete cosine transform (DCT). This algorithm achieves computation significantly faster than existing optimization-based methods. Additionally, to improve the sensing quality, we develop a mask optimization method based on the generic algorithm and the corresponding system matrix calibration algorithm.We evaluate the performance of our proposed lensless reconstruction and tactile sensing through qualitative and quantitative experiments. Furthermore, we demonstrate ThinTact's practical applicability in diverse applications, including texture recognition and contact-rich object manipulation. The paper will appear in the IEEE Transactions on Robotics: https://ieeexplore.ieee.org/document/10842357. Video: https://youtu.be/YrOO9BDMAHo