 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgemrCAD: Multimodal Refinement of Computer-aided Designs
Apr 28, 2025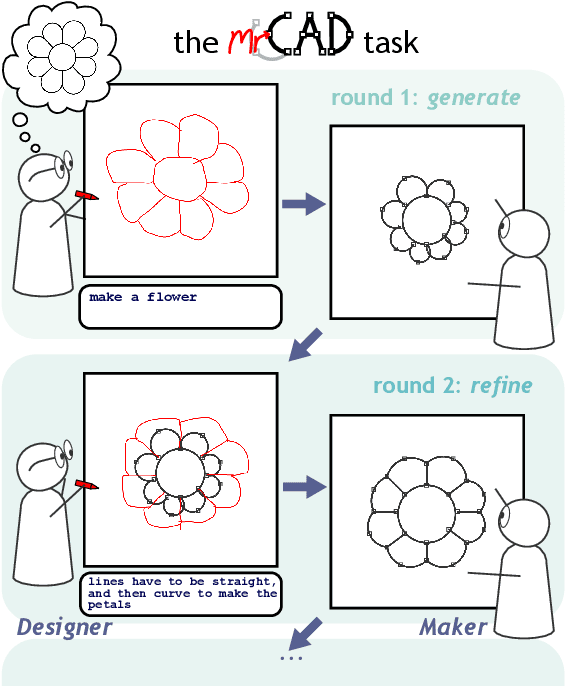
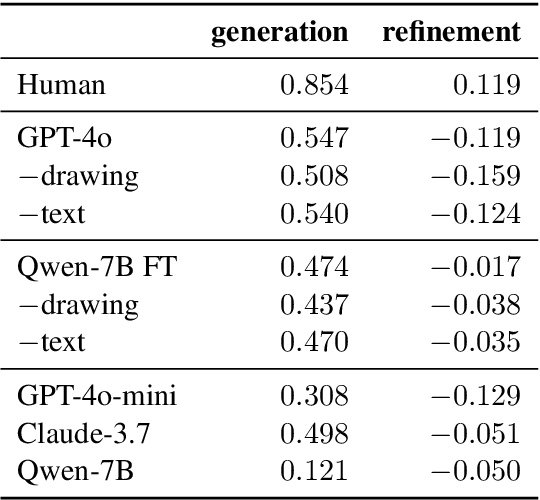
A key feature of human collaboration is the ability to iteratively refine the concepts we have communicated. In contrast, while generative AI excels at the \textit{generation} of content, it often struggles to make specific language-guided \textit{modifications} of its prior outputs. To bridge the gap between how humans and machines perform edits, we present mrCAD, a dataset of multimodal instructions in a communication game. In each game, players created computer aided designs (CADs) and refined them over several rounds to match specific target designs. Only one player, the Designer, could see the target, and they must instruct the other player, the Maker, using text, drawing, or a combination of modalities. mrCAD consists of 6,082 communication games, 15,163 instruction-execution rounds, played between 1,092 pairs of human players. We analyze the dataset and find that generation and refinement instructions differ in their composition of drawing and text. Using the mrCAD task as a benchmark, we find that state-of-the-art VLMs are better at following generation instructions than refinement instructions. These results lay a foundation for analyzing and modeling a multimodal language of refinement that is not represented in previous datasets.
Aligning Constraint Generation with Design Intent in Parametric CAD
Apr 17, 2025



We adapt alignment techniques from reasoning LLMs to the task of generating engineering sketch constraints found in computer-aided design (CAD) models. Engineering sketches consist of geometric primitives (e.g. points, lines) connected by constraints (e.g. perpendicular, tangent) that define the relationships between them. For a design to be easily editable, the constraints must effectively capture design intent, ensuring the geometry updates predictably when parameters change. Although current approaches can generate CAD designs, an open challenge remains to align model outputs with design intent, we label this problem `design alignment'. A critical first step towards aligning generative CAD models is to generate constraints which fully-constrain all geometric primitives, without over-constraining or distorting sketch geometry. Using alignment techniques to train an existing constraint generation model with feedback from a constraint solver, we are able to fully-constrain 93% of sketches compared to 34% when using a na\"ive supervised fine-tuning (SFT) baseline and only 8.9% without alignment. Our approach can be applied to any existing constraint generation model and sets the stage for further research bridging alignment strategies between the language and design domains.
BrepGen: A B-rep Generative Diffusion Model with Structured Latent Geometry
Jan 28, 2024



This paper presents BrepGen, a diffusion-based generative approach that directly outputs a Boundary representation (B-rep) Computer-Aided Design (CAD) model. BrepGen represents a B-rep model as a novel structured latent geometry in a hierarchical tree. With the root node representing a whole CAD solid, each element of a B-rep model (i.e., a face, an edge, or a vertex) progressively turns into a child-node from top to bottom. B-rep geometry information goes into the nodes as the global bounding box of each primitive along with a latent code describing the local geometric shape. The B-rep topology information is implicitly represented by node duplication. When two faces share an edge, the edge curve will appear twice in the tree, and a T-junction vertex with three incident edges appears six times in the tree with identical node features. Starting from the root and progressing to the leaf, BrepGen employs Transformer-based diffusion models to sequentially denoise node features while duplicated nodes are detected and merged, recovering the B-Rep topology information. Extensive experiments show that BrepGen sets a new milestone in CAD B-rep generation, surpassing existing methods on various benchmarks. Results on our newly collected furniture dataset further showcase its exceptional capability in generating complicated geometry. While previous methods were limited to generating simple prismatic shapes, BrepGen incorporates free-form and doubly-curved surfaces for the first time. Additional applications of BrepGen include CAD autocomplete and design interpolation. The code, pretrained models, and dataset will be released.
ASAP: Automated Sequence Planning for Complex Robotic Assembly with Physical Feasibility
Sep 29, 2023The automated assembly of complex products requires a system that can automatically plan a physically feasible sequence of actions for assembling many parts together. In this paper, we present ASAP, a physics-based planning approach for automatically generating such a sequence for general-shaped assemblies. ASAP accounts for gravity to design a sequence where each sub-assembly is physically stable with a limited number of parts being held and a support surface. We apply efficient tree search algorithms to reduce the combinatorial complexity of determining such an assembly sequence. The search can be guided by either geometric heuristics or graph neural networks trained on data with simulation labels. Finally, we show the superior performance of ASAP at generating physically realistic assembly sequence plans on a large dataset of hundreds of complex product assemblies. We further demonstrate the applicability of ASAP on both simulation and real-world robotic setups. Project website: asap.csail.mit.edu
Learned Visual Features to Textual Explanations
Sep 01, 2023Interpreting the learned features of vision models has posed a longstanding challenge in the field of machine learning. To address this issue, we propose a novel method that leverages the capabilities of large language models (LLMs) to interpret the learned features of pre-trained image classifiers. Our method, called TExplain, tackles this task by training a neural network to establish a connection between the feature space of image classifiers and LLMs. Then, during inference, our approach generates a vast number of sentences to explain the features learned by the classifier for a given image. These sentences are then used to extract the most frequent words, providing a comprehensive understanding of the learned features and patterns within the classifier. Our method, for the first time, utilizes these frequent words corresponding to a visual representation to provide insights into the decision-making process of the independently trained classifier, enabling the detection of spurious correlations, biases, and a deeper comprehension of its behavior. To validate the effectiveness of our approach, we conduct experiments on diverse datasets, including ImageNet-9L and Waterbirds. The results demonstrate the potential of our method to enhance the interpretability and robustness of image classifiers.
Hierarchical Neural Coding for Controllable CAD Model Generation
Jun 30, 2023



This paper presents a novel generative model for Computer Aided Design (CAD) that 1) represents high-level design concepts of a CAD model as a three-level hierarchical tree of neural codes, from global part arrangement down to local curve geometry; and 2) controls the generation or completion of CAD models by specifying the target design using a code tree. Concretely, a novel variant of a vector quantized VAE with "masked skip connection" extracts design variations as neural codebooks at three levels. Two-stage cascaded auto-regressive transformers learn to generate code trees from incomplete CAD models and then complete CAD models following the intended design. Extensive experiments demonstrate superior performance on conventional tasks such as random generation while enabling novel interaction capabilities on conditional generation tasks. The code is available at https://github.com/samxuxiang/hnc-cad.
Next Steps for Human-Centered Generative AI: A Technical Perspective
Jun 27, 2023
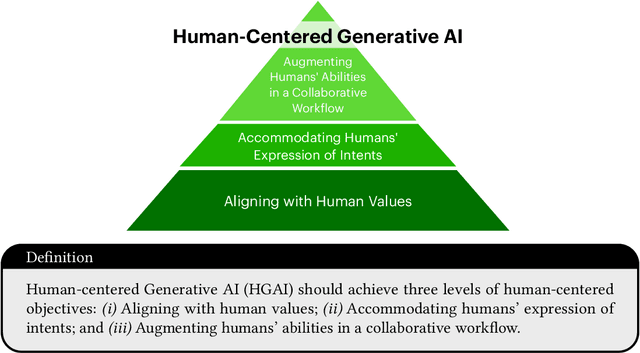
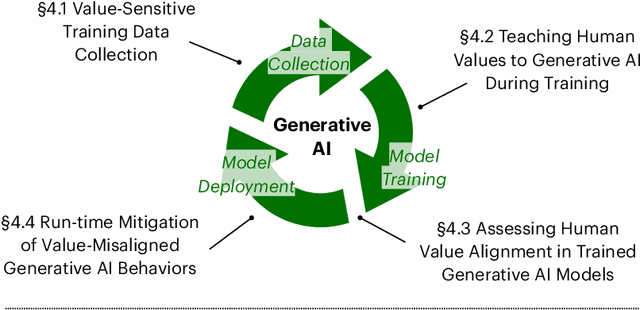

Through iterative, cross-disciplinary discussions, we define and propose next-steps for Human-centered Generative AI (HGAI) from a technical perspective. We contribute a roadmap that lays out future directions of Generative AI spanning three levels: Aligning with human values; Accommodating humans' expression of intents; and Augmenting humans' abilities in a collaborative workflow. This roadmap intends to draw interdisciplinary research teams to a comprehensive list of emergent ideas in HGAI, identifying their interested topics while maintaining a coherent big picture of the future work landscape.
Assemble Them All: Physics-Based Planning for Generalizable Assembly by Disassembly
Nov 08, 2022Assembly planning is the core of automating product assembly, maintenance, and recycling for modern industrial manufacturing. Despite its importance and long history of research, planning for mechanical assemblies when given the final assembled state remains a challenging problem. This is due to the complexity of dealing with arbitrary 3D shapes and the highly constrained motion required for real-world assemblies. In this work, we propose a novel method to efficiently plan physically plausible assembly motion and sequences for real-world assemblies. Our method leverages the assembly-by-disassembly principle and physics-based simulation to efficiently explore a reduced search space. To evaluate the generality of our method, we define a large-scale dataset consisting of thousands of physically valid industrial assemblies with a variety of assembly motions required. Our experiments on this new benchmark demonstrate we achieve a state-of-the-art success rate and the highest computational efficiency compared to other baseline algorithms. Our method also generalizes to rotational assemblies (e.g., screws and puzzles) and solves 80-part assemblies within several minutes.
Reconstructing editable prismatic CAD from rounded voxel models
Sep 02, 2022
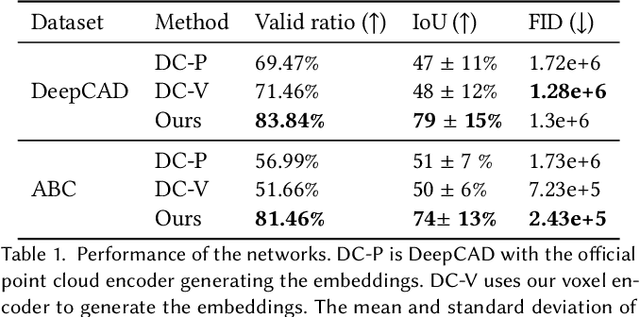
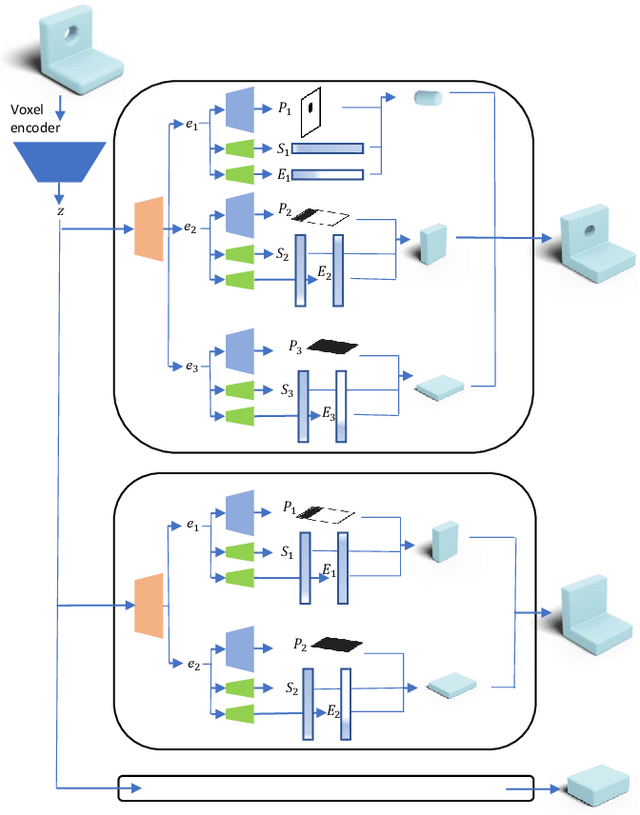
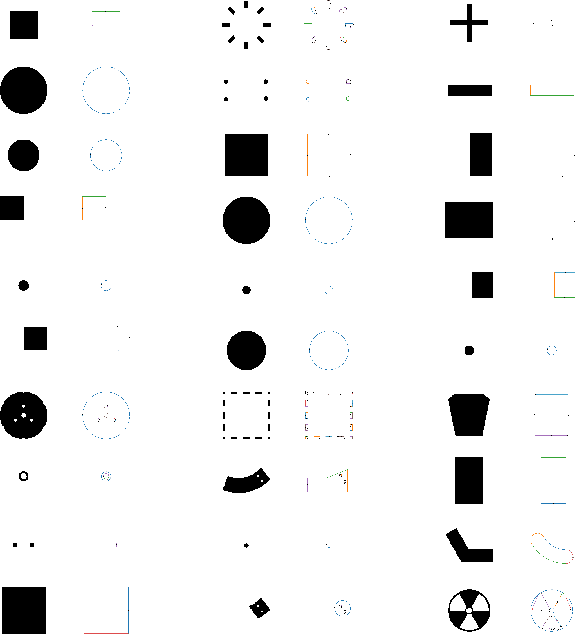
Reverse Engineering a CAD shape from other representations is an important geometric processing step for many downstream applications. In this work, we introduce a novel neural network architecture to solve this challenging task and approximate a smoothed signed distance function with an editable, constrained, prismatic CAD model. During training, our method reconstructs the input geometry in the voxel space by decomposing the shape into a series of 2D profile images and 1D envelope functions. These can then be recombined in a differentiable way allowing a geometric loss function to be defined. During inference, we obtain the CAD data by first searching a database of 2D constrained sketches to find curves which approximate the profile images, then extrude them and use Boolean operations to build the final CAD model. Our method approximates the target shape more closely than other methods and outputs highly editable constrained parametric sketches which are compatible with existing CAD software.
SimCURL: Simple Contrastive User Representation Learning from Command Sequences
Jul 29, 2022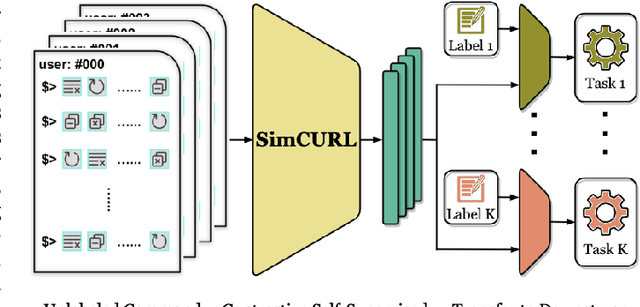

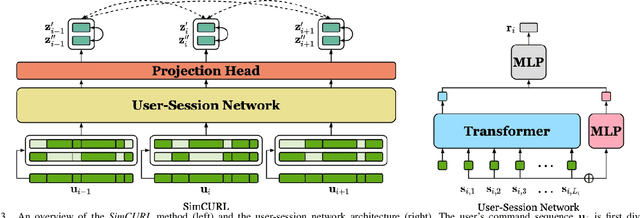

User modeling is crucial to understanding user behavior and essential for improving user experience and personalized recommendations. When users interact with software, vast amounts of command sequences are generated through logging and analytics systems. These command sequences contain clues to the users' goals and intents. However, these data modalities are highly unstructured and unlabeled, making it difficult for standard predictive systems to learn from. We propose SimCURL, a simple yet effective contrastive self-supervised deep learning framework that learns user representation from unlabeled command sequences. Our method introduces a user-session network architecture, as well as session dropout as a novel way of data augmentation. We train and evaluate our method on a real-world command sequence dataset of more than half a billion commands. Our method shows significant improvement over existing methods when the learned representation is transferred to downstream tasks such as experience and expertise classification.