 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAIRA_2: Overcoming Bottlenecks in AI Research Agents
Mar 27, 2026Existing research has identified three structural performance bottlenecks in AI research agents: (1) synchronous single-GPU execution constrains sample throughput, limiting the benefit of search; (2) a generalization gap where validation-based selection causes performance to degrade over extended search horizons; and (3) the limited capability of fixed, single-turn LLM operators imposes a ceiling on search performance. We introduce AIRA$_2$, which addresses these bottlenecks through three architectural choices: an asynchronous multi-GPU worker pool that increases experiment throughput linearly; a Hidden Consistent Evaluation protocol that delivers a reliable evaluation signal; and ReAct agents that dynamically scope their actions and debug interactively. On MLE-bench-30, AIRA$_2$ achieves a mean Percentile Rank of 71.8% at 24 hours - surpassing the previous best of 69.9% - and steadily improves to 76.0% at 72 hours. Ablation studies reveal that each component is necessary and that the "overfitting" reported in prior work was driven by evaluation noise rather than true data memorization.
AIRS-Bench: a Suite of Tasks for Frontier AI Research Science Agents
Feb 09, 2026LLM agents hold significant promise for advancing scientific research. To accelerate this progress, we introduce AIRS-Bench (the AI Research Science Benchmark), a suite of 20 tasks sourced from state-of-the-art machine learning papers. These tasks span diverse domains, including language modeling, mathematics, bioinformatics, and time series forecasting. AIRS-Bench tasks assess agentic capabilities over the full research lifecycle -- including idea generation, experiment analysis and iterative refinement -- without providing baseline code. The AIRS-Bench task format is versatile, enabling easy integration of new tasks and rigorous comparison across different agentic frameworks. We establish baselines using frontier models paired with both sequential and parallel scaffolds. Our results show that agents exceed human SOTA in four tasks but fail to match it in sixteen others. Even when agents surpass human benchmarks, they do not reach the theoretical performance ceiling for the underlying tasks. These findings indicate that AIRS-Bench is far from saturated and offers substantial room for improvement. We open-source the AIRS-Bench task definitions and evaluation code to catalyze further development in autonomous scientific research.
Multi-Agent Craftax: Benchmarking Open-Ended Multi-Agent Reinforcement Learning at the Hyperscale
Nov 07, 2025Progress in multi-agent reinforcement learning (MARL) requires challenging benchmarks that assess the limits of current methods. However, existing benchmarks often target narrow short-horizon challenges that do not adequately stress the long-term dependencies and generalization capabilities inherent in many multi-agent systems. To address this, we first present \textit{Craftax-MA}: an extension of the popular open-ended RL environment, Craftax, that supports multiple agents and evaluates a wide range of general abilities within a single environment. Written in JAX, \textit{Craftax-MA} is exceptionally fast with a training run using 250 million environment interactions completing in under an hour. To provide a more compelling challenge for MARL, we also present \textit{Craftax-Coop}, an extension introducing heterogeneous agents, trading and more mechanics that require complex cooperation among agents for success. We provide analysis demonstrating that existing algorithms struggle with key challenges in this benchmark, including long-horizon credit assignment, exploration and cooperation, and argue for its potential to drive long-term research in MARL.
Cross Domain Generative Augmentation: Domain Generalization with Latent Diffusion Models
Dec 08, 2023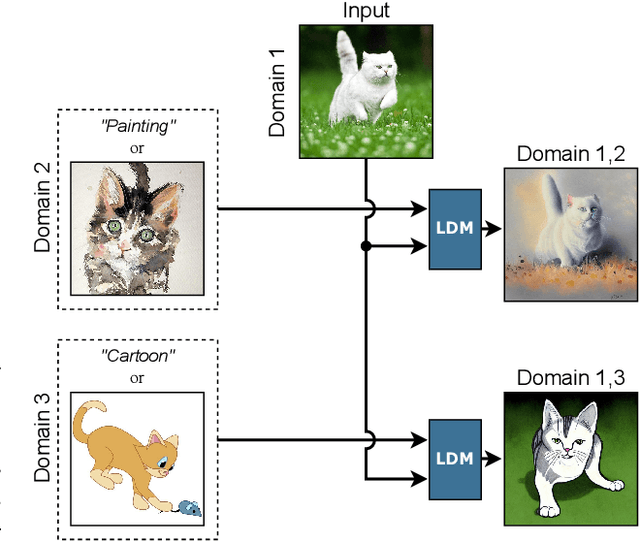



Despite the huge effort in developing novel regularizers for Domain Generalization (DG), adding simple data augmentation to the vanilla ERM which is a practical implementation of the Vicinal Risk Minimization principle (VRM) \citep{chapelle2000vicinal} outperforms or stays competitive with many of the proposed regularizers. The VRM reduces the estimation error in ERM by replacing the point-wise kernel estimates with a more precise estimation of true data distribution that reduces the gap between data points \textbf{within each domain}. However, in the DG setting, the estimation error of true data distribution by ERM is mainly caused by the distribution shift \textbf{between domains} which cannot be fully addressed by simple data augmentation techniques within each domain. Inspired by this limitation of VRM, we propose a novel data augmentation named Cross Domain Generative Augmentation (CDGA) that replaces the pointwise kernel estimates in ERM with new density estimates in the \textbf{vicinity of domain pairs} so that the gap between domains is further reduced. To this end, CDGA, which is built upon latent diffusion models (LDM), generates synthetic images to fill the gap between all domains and as a result, reduces the non-iidness. We show that CDGA outperforms SOTA DG methods under the Domainbed benchmark. To explain the effectiveness of CDGA, we generate more than 5 Million synthetic images and perform extensive ablation studies including data scaling laws, distribution visualization, domain shift quantification, adversarial robustness, and loss landscape analysis.
ASAP: Automated Sequence Planning for Complex Robotic Assembly with Physical Feasibility
Sep 29, 2023The automated assembly of complex products requires a system that can automatically plan a physically feasible sequence of actions for assembling many parts together. In this paper, we present ASAP, a physics-based planning approach for automatically generating such a sequence for general-shaped assemblies. ASAP accounts for gravity to design a sequence where each sub-assembly is physically stable with a limited number of parts being held and a support surface. We apply efficient tree search algorithms to reduce the combinatorial complexity of determining such an assembly sequence. The search can be guided by either geometric heuristics or graph neural networks trained on data with simulation labels. Finally, we show the superior performance of ASAP at generating physically realistic assembly sequence plans on a large dataset of hundreds of complex product assemblies. We further demonstrate the applicability of ASAP on both simulation and real-world robotic setups. Project website: asap.csail.mit.edu