 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented Object Intelligence: Making the Analog World Interactable with XR-Objects
Apr 23, 2024



Seamless integration of physical objects as interactive digital entities remains a challenge for spatial computing. This paper introduces Augmented Object Intelligence (AOI), a novel XR interaction paradigm designed to blur the lines between digital and physical by equipping real-world objects with the ability to interact as if they were digital, where every object has the potential to serve as a portal to vast digital functionalities. Our approach utilizes object segmentation and classification, combined with the power of Multimodal Large Language Models (MLLMs), to facilitate these interactions. We implement the AOI concept in the form of XR-Objects, an open-source prototype system that provides a platform for users to engage with their physical environment in rich and contextually relevant ways. This system enables analog objects to not only convey information but also to initiate digital actions, such as querying for details or executing tasks. Our contributions are threefold: (1) we define the AOI concept and detail its advantages over traditional AI assistants, (2) detail the XR-Objects system's open-source design and implementation, and (3) show its versatility through a variety of use cases and a user study.
InstructPipe: Building Visual Programming Pipelines with Human Instructions
Dec 15, 2023



Visual programming provides beginner-level programmers with a coding-free experience to build their customized pipelines. Existing systems require users to build a pipeline entirely from scratch, implying that novice users need to set up and link appropriate nodes all by themselves, starting from a blank workspace. We present InstructPipe, an AI assistant that enables users to start prototyping machine learning (ML) pipelines with text instructions. We designed two LLM modules and a code interpreter to execute our solution. LLM modules generate pseudocode of a target pipeline, and the interpreter renders a pipeline in the node-graph editor for further human-AI collaboration. Technical evaluations reveal that InstructPipe reduces user interactions by 81.1% compared to traditional methods. Our user study (N=16) showed that InstructPipe empowers novice users to streamline their workflow in creating desired ML pipelines, reduce their learning curve, and spark innovative ideas with open-ended commands.
Learning to Fold Real Garments with One Arm: A Case Study in Cloud-Based Robotics Research
Apr 21, 2022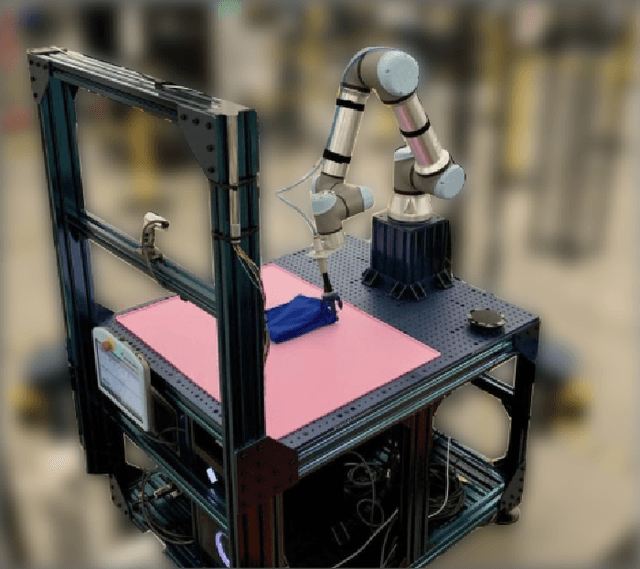
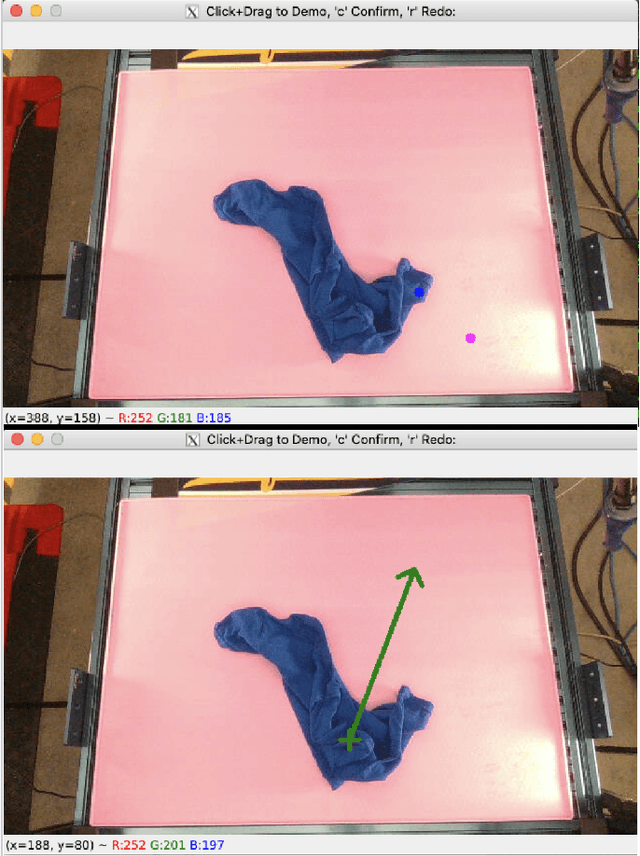
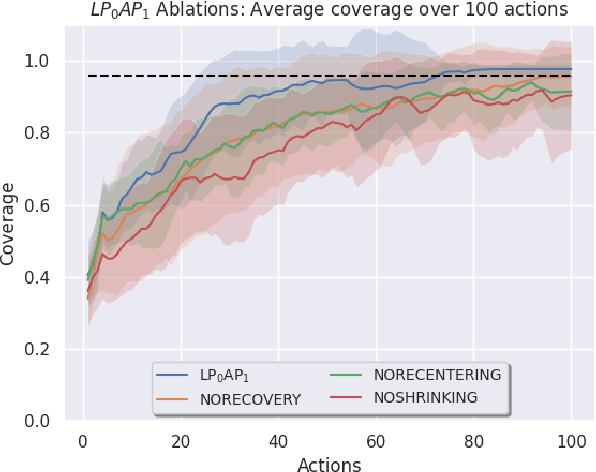
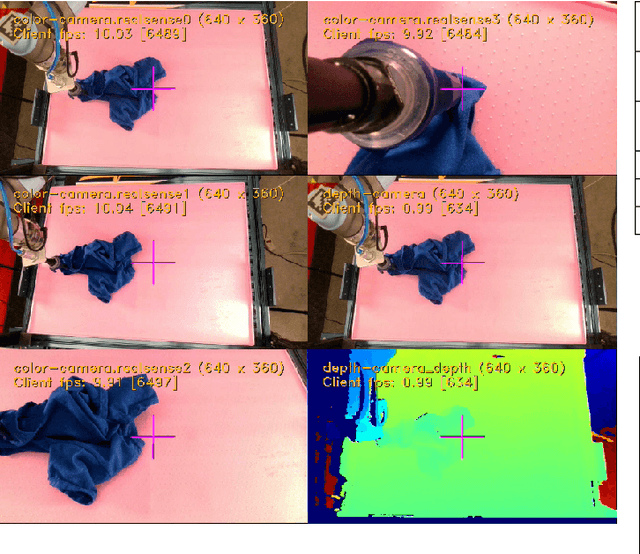
Autonomous fabric manipulation is a longstanding challenge in robotics, but evaluating progress is difficult due to the cost and diversity of robot hardware. Using Reach, a cloud robotics platform that enables low-latency remote execution of control policies on physical robots, we present the first systematic benchmarking of fabric manipulation algorithms on physical hardware. We develop 4 novel learning-based algorithms that model expert actions, keypoints, reward functions, and dynamic motions, and we compare these against 4 learning-free and inverse dynamics algorithms on the task of folding a crumpled T-shirt with a single robot arm. The entire lifecycle of data collection, model training, and policy evaluation is performed remotely without physical access to the robot workcell. Results suggest a new algorithm combining imitation learning with analytic methods achieves 84% of human-level performance on the folding task. See https://sites.google.com/berkeley.edu/cloudfolding for all data, code, models, and supplemental material.
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
Apr 01, 2022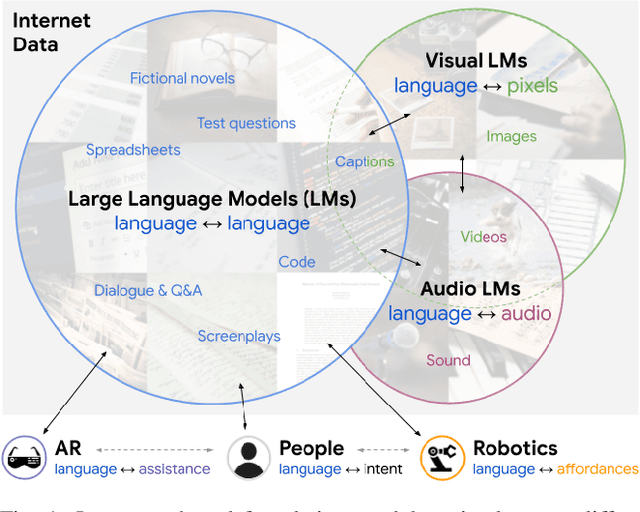
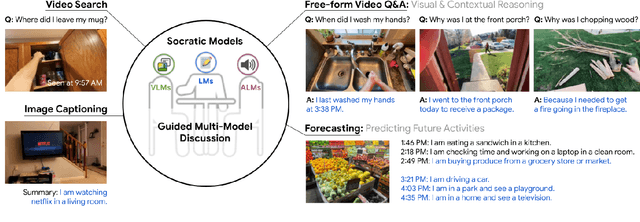


Large foundation models can exhibit unique capabilities depending on the domain of data they are trained on. While these domains are generic, they may only barely overlap. For example, visual-language models (VLMs) are trained on Internet-scale image captions, but large language models (LMs) are further trained on Internet-scale text with no images (e.g. from spreadsheets, to SAT questions). As a result, these models store different forms of commonsense knowledge across different domains. In this work, we show that this model diversity is symbiotic, and can be leveraged to build AI systems with structured Socratic dialogue -- in which new multimodal tasks are formulated as a guided language-based exchange between different pre-existing foundation models, without additional finetuning. In the context of egocentric perception, we present a case study of Socratic Models (SMs) that can provide meaningful results for complex tasks such as generating free-form answers to contextual questions about egocentric video, by formulating video Q&A as short story Q&A, i.e. summarizing the video into a short story, then answering questions about it. Additionally, SMs can generate captions for Internet images, and are competitive with state-of-the-art on zero-shot video-to-text retrieval with 42.8 R@1 on MSR-VTT 1k-A. SMs demonstrate how to compose foundation models zero-shot to capture new multimodal functionalities, without domain-specific data collection. Prototypes are available at socraticmodels.github.io.
Implicit Behavioral Cloning
Sep 01, 2021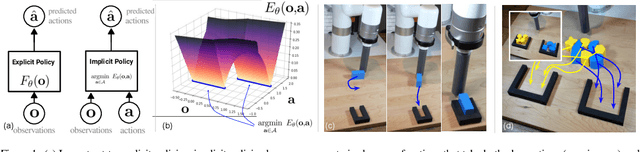
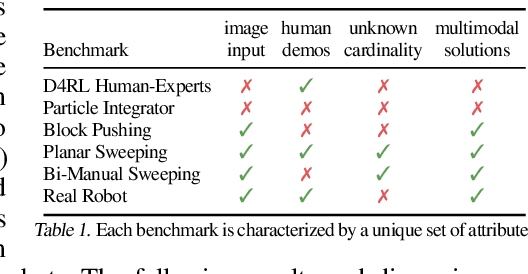
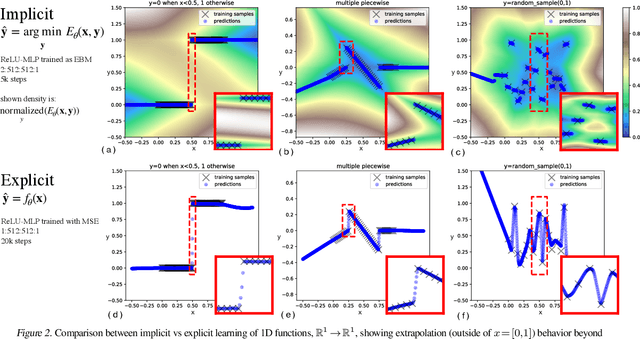
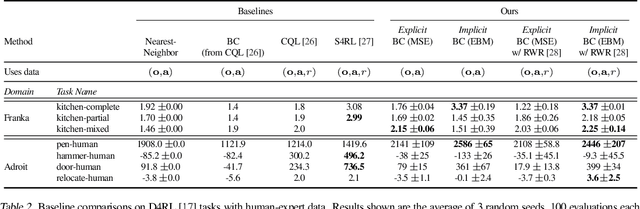
We find that across a wide range of robot policy learning scenarios, treating supervised policy learning with an implicit model generally performs better, on average, than commonly used explicit models. We present extensive experiments on this finding, and we provide both intuitive insight and theoretical arguments distinguishing the properties of implicit models compared to their explicit counterparts, particularly with respect to approximating complex, potentially discontinuous and multi-valued (set-valued) functions. On robotic policy learning tasks we show that implicit behavioral cloning policies with energy-based models (EBM) often outperform common explicit (Mean Square Error, or Mixture Density) behavioral cloning policies, including on tasks with high-dimensional action spaces and visual image inputs. We find these policies provide competitive results or outperform state-of-the-art offline reinforcement learning methods on the challenging human-expert tasks from the D4RL benchmark suite, despite using no reward information. In the real world, robots with implicit policies can learn complex and remarkably subtle behaviors on contact-rich tasks from human demonstrations, including tasks with high combinatorial complexity and tasks requiring 1mm precision.
Transporter Networks: Rearranging the Visual World for Robotic Manipulation
Oct 27, 2020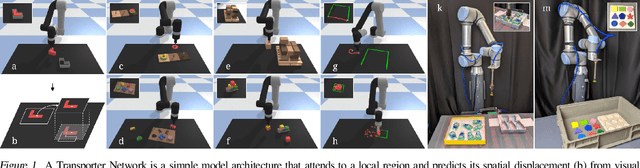
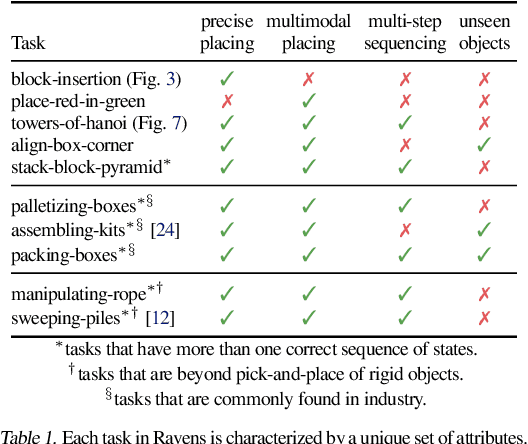
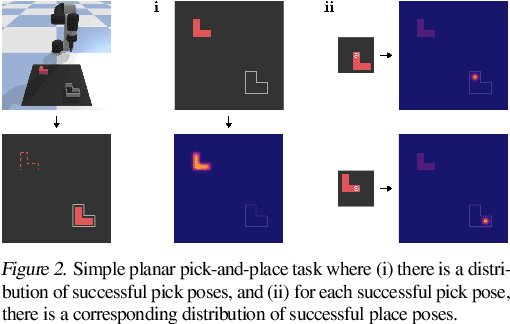
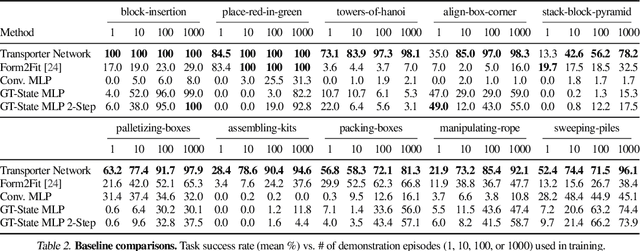
Robotic manipulation can be formulated as inducing a sequence of spatial displacements: where the space being moved can encompass an object, part of an object, or end effector. In this work, we propose the Transporter Network, a simple model architecture that rearranges deep features to infer spatial displacements from visual input - which can parameterize robot actions. It makes no assumptions of objectness (e.g. canonical poses, models, or keypoints), it exploits spatial symmetries, and is orders of magnitude more sample efficient than our benchmarked alternatives in learning vision-based manipulation tasks: from stacking a pyramid of blocks, to assembling kits with unseen objects; from manipulating deformable ropes, to pushing piles of small objects with closed-loop feedback. Our method can represent complex multi-modal policy distributions and generalizes to multi-step sequential tasks, as well as 6DoF pick-and-place. Experiments on 10 simulated tasks show that it learns faster and generalizes better than a variety of end-to-end baselines, including policies that use ground-truth object poses. We validate our methods with hardware in the real world. Experiment videos and code will be made available at https://transporternets.github.io
Spatial Action Maps for Mobile Manipulation
Apr 20, 2020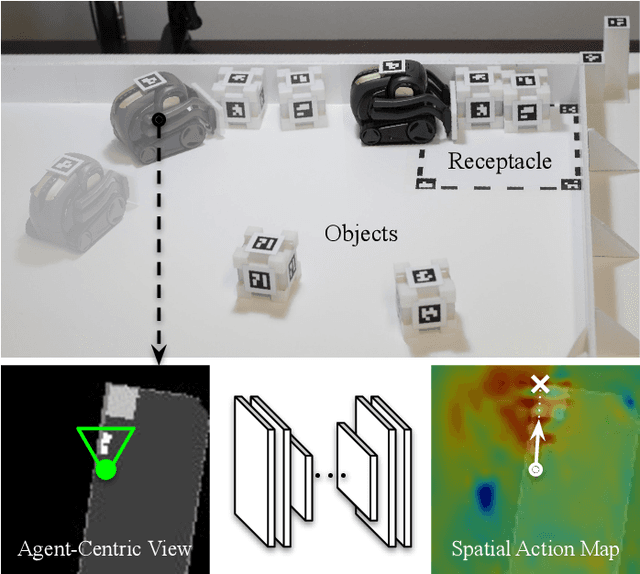
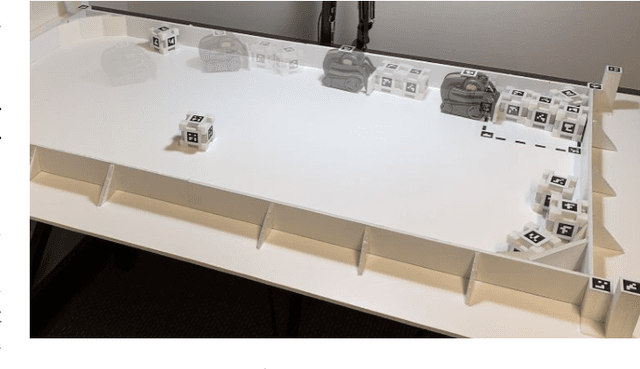
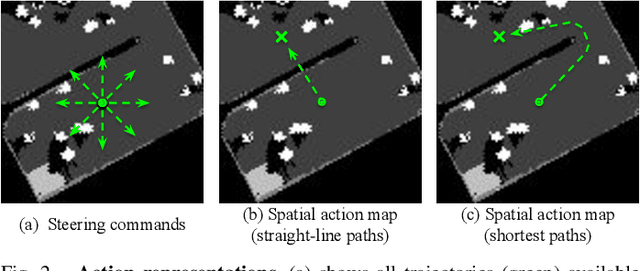
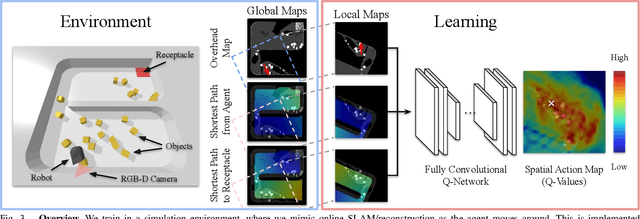
This paper proposes a new action representation for learning to perform complex mobile manipulation tasks. In a typical deep Q-learning setup, a convolutional neural network (ConvNet) is trained to map from an image representing the current state (e.g., a birds-eye view of a SLAM reconstruction of the scene) to predicted Q-values for a small set of steering command actions (step forward, turn right, turn left, etc.). Instead, we propose an action representation in the same domain as the state: "spatial action maps." In our proposal, the set of possible actions is represented by pixels of an image, where each pixel represents a trajectory to the corresponding scene location along a shortest path through obstacles of the partially reconstructed scene. A significant advantage of this approach is that the spatial position of each state-action value prediction represents a local milestone (local end-point) for the agent's policy, which may be easily recognizable in local visual patterns of the state image. A second advantage is that atomic actions can perform long-range plans (follow the shortest path to a point on the other side of the scene), and thus it is simpler to learn complex behaviors with a deep Q-network. A third advantage is that we can use a fully convolutional network (FCN) with skip connections to learn the mapping from state images to pixel-aligned action images efficiently. During experiments with a robot that learns to push objects to a goal location, we find that policies learned with this proposed action representation achieve significantly better performance than traditional alternatives.
Grasping in the Wild:Learning 6DoF Closed-Loop Grasping from Low-Cost Demonstrations
Dec 09, 2019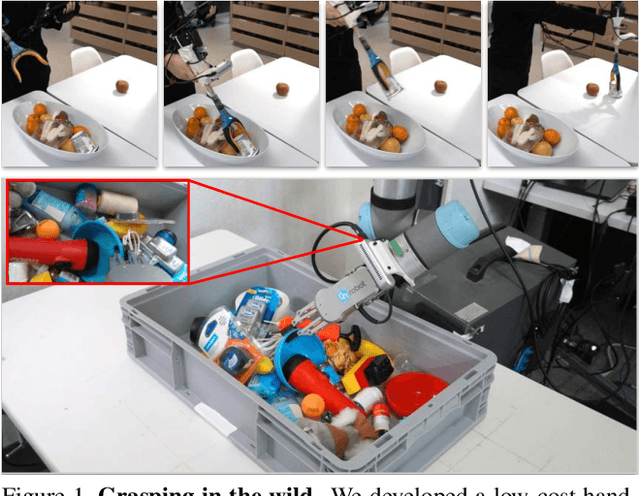
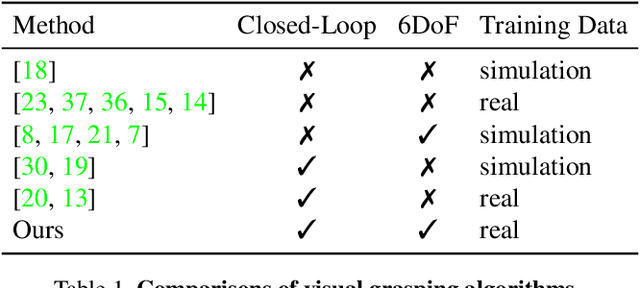


Intelligent manipulation benefits from the capacity to flexibly control an end-effector with high degrees of freedom (DoF) and dynamically react to the environment. However, due to the challenges of collecting effective training data and learning efficiently, most grasping algorithms today are limited to top-down movements and open-loop execution. In this work, we propose a new low-cost hardware interface for collecting grasping demonstrations by people in diverse environments. Leveraging this data, we show that it is possible to train a robust end-to-end 6DoF closed-loop grasping model with reinforcement learning that transfers to real robots. A key aspect of our grasping model is that it uses ``action-view'' based rendering to simulate future states with respect to different possible actions. By evaluating these states using a learned value function (Q-function), our method is able to better select corresponding actions that maximize total rewards (i.e., grasping success). Our final grasping system is able to achieve reliable 6DoF closed-loop grasping of novel objects across various scene configurations, as well as dynamic scenes with moving objects.
Form2Fit: Learning Shape Priors for Generalizable Assembly from Disassembly
Oct 30, 2019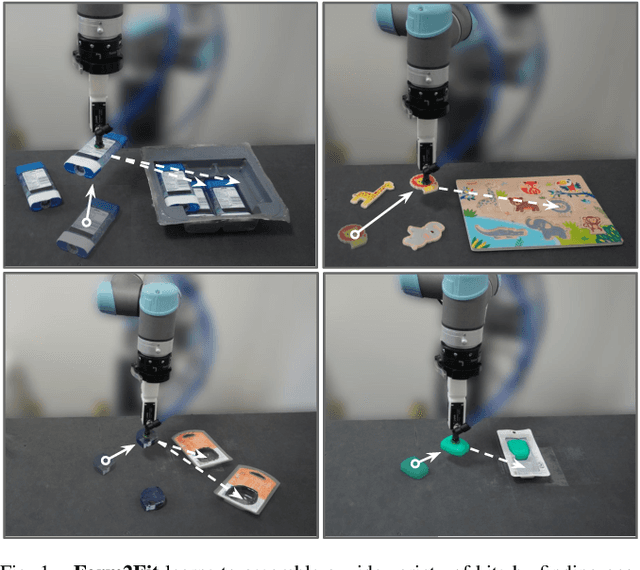
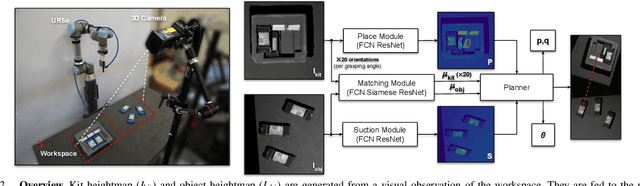
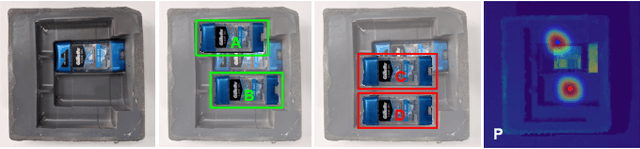
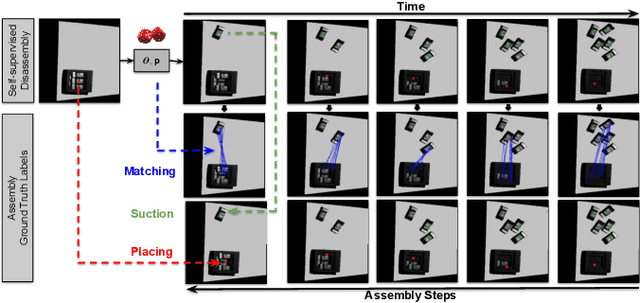
Is it possible to learn policies for robotic assembly that can generalize to new objects? We explore this idea in the context of the kit assembly task. Since classic methods rely heavily on object pose estimation, they often struggle to generalize to new objects without 3D CAD models or task-specific training data. In this work, we propose to formulate the kit assembly task as a shape matching problem, where the goal is to learn a shape descriptor that establishes geometric correspondences between object surfaces and their target placement locations from visual input. This formulation enables the model to acquire a broader understanding of how shapes and surfaces fit together for assembly -- allowing it to generalize to new objects and kits. To obtain training data for our model, we present a self-supervised data-collection pipeline that obtains ground truth object-to-placement correspondences by disassembling complete kits. Our resulting real-world system, Form2Fit, learns effective pick and place strategies for assembling objects into a variety of kits -- achieving $90\%$ average success rates under different initial conditions (e.g. varying object and kit poses), $94\%$ success under new configurations of multiple kits, and over $86\%$ success with completely new objects and kits.
ClearGrasp: 3D Shape Estimation of Transparent Objects for Manipulation
Oct 14, 2019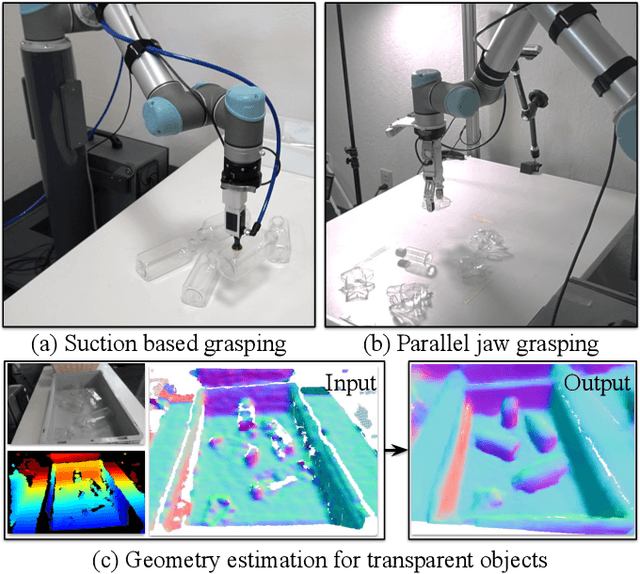



Transparent objects are a common part of everyday life, yet they possess unique visual properties that make them incredibly difficult for standard 3D sensors to produce accurate depth estimates for. In many cases, they often appear as noisy or distorted approximations of the surfaces that lie behind them. To address these challenges, we present ClearGrasp -- a deep learning approach for estimating accurate 3D geometry of transparent objects from a single RGB-D image for robotic manipulation. Given a single RGB-D image of transparent objects, ClearGrasp uses deep convolutional networks to infer surface normals, masks of transparent surfaces, and occlusion boundaries. It then uses these outputs to refine the initial depth estimates for all transparent surfaces in the scene. To train and test ClearGrasp, we construct a large-scale synthetic dataset of over 50,000 RGB-D images, as well as a real-world test benchmark with 286 RGB-D images of transparent objects and their ground truth geometries. The experiments demonstrate that ClearGrasp is substantially better than monocular depth estimation baselines and is capable of generalizing to real-world images and novel objects. We also demonstrate that ClearGrasp can be applied out-of-the-box to improve grasping algorithms' performance on transparent objects. Code, data, and benchmarks will be released. Supplementary materials available on the project website: https://sites.google.com/view/cleargrasp