 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClearGrasp: 3D Shape Estimation of Transparent Objects for Manipulation
Paper and Code
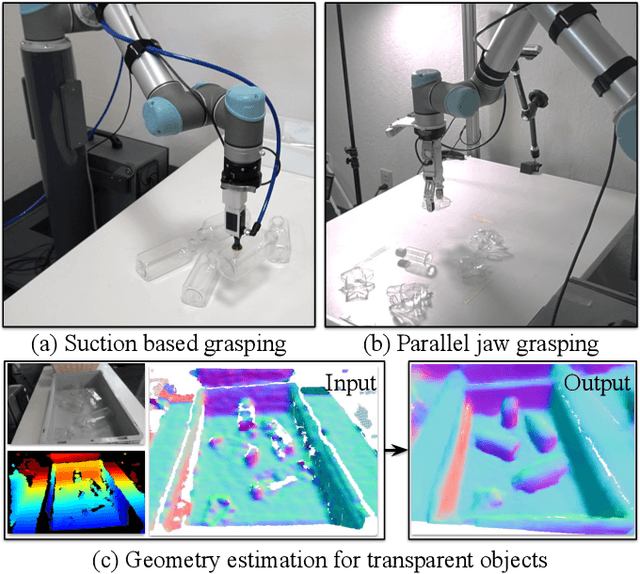



Transparent objects are a common part of everyday life, yet they possess unique visual properties that make them incredibly difficult for standard 3D sensors to produce accurate depth estimates for. In many cases, they often appear as noisy or distorted approximations of the surfaces that lie behind them. To address these challenges, we present ClearGrasp -- a deep learning approach for estimating accurate 3D geometry of transparent objects from a single RGB-D image for robotic manipulation. Given a single RGB-D image of transparent objects, ClearGrasp uses deep convolutional networks to infer surface normals, masks of transparent surfaces, and occlusion boundaries. It then uses these outputs to refine the initial depth estimates for all transparent surfaces in the scene. To train and test ClearGrasp, we construct a large-scale synthetic dataset of over 50,000 RGB-D images, as well as a real-world test benchmark with 286 RGB-D images of transparent objects and their ground truth geometries. The experiments demonstrate that ClearGrasp is substantially better than monocular depth estimation baselines and is capable of generalizing to real-world images and novel objects. We also demonstrate that ClearGrasp can be applied out-of-the-box to improve grasping algorithms' performance on transparent objects. Code, data, and benchmarks will be released. Supplementary materials available on the project website: https://sites.google.com/view/cleargrasp