 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-power Ship Detection in Satellite Images Using Neuromorphic Hardware
Jun 17, 2024Transmitting Earth observation image data from satellites to ground stations incurs significant costs in terms of power and bandwidth. For maritime ship detection, on-board data processing can identify ships and reduce the amount of data sent to the ground. However, most images captured on board contain only bodies of water or land, with the Airbus Ship Detection dataset showing only 22.1\% of images containing ships. We designed a low-power, two-stage system to optimize performance instead of relying on a single complex model. The first stage is a lightweight binary classifier that acts as a gating mechanism to detect the presence of ships. This stage runs on Brainchip's Akida 1.0, which leverages activation sparsity to minimize dynamic power consumption. The second stage employs a YOLOv5 object detection model to identify the location and size of ships. This approach achieves a mean Average Precision (mAP) of 76.9\%, which increases to 79.3\% when evaluated solely on images containing ships, by reducing false positives. Additionally, we calculated that evaluating the full validation set on a NVIDIA Jetson Nano device requires 111.4 kJ of energy. Our two-stage system reduces this energy consumption to 27.3 kJ, which is less than a fourth, demonstrating the efficiency of a heterogeneous computing system.
Neuromorphic Intermediate Representation: A Unified Instruction Set for Interoperable Brain-Inspired Computing
Nov 24, 2023Spiking neural networks and neuromorphic hardware platforms that emulate neural dynamics are slowly gaining momentum and entering main-stream usage. Despite a well-established mathematical foundation for neural dynamics, the implementation details vary greatly across different platforms. Correspondingly, there are a plethora of software and hardware implementations with their own unique technology stacks. Consequently, neuromorphic systems typically diverge from the expected computational model, which challenges the reproducibility and reliability across platforms. Additionally, most neuromorphic hardware is limited by its access via a single software frameworks with a limited set of training procedures. Here, we establish a common reference-frame for computations in neuromorphic systems, dubbed the Neuromorphic Intermediate Representation (NIR). NIR defines a set of computational primitives as idealized continuous-time hybrid systems that can be composed into graphs and mapped to and from various neuromorphic technology stacks. By abstracting away assumptions around discretization and hardware constraints, NIR faithfully captures the fundamental computation, while simultaneously exposing the exact differences between the evaluated implementation and the idealized mathematical formalism. We reproduce three NIR graphs across 7 neuromorphic simulators and 4 hardware platforms, demonstrating support for an unprecedented number of neuromorphic systems. With NIR, we decouple the evolution of neuromorphic hardware and software, ultimately increasing the interoperability between platforms and improving accessibility to neuromorphic technologies. We believe that NIR is an important step towards the continued study of brain-inspired hardware and bottom-up approaches aimed at an improved understanding of the computational underpinnings of nervous systems.
Ultra-low-power Image Classification on Neuromorphic Hardware
Sep 28, 2023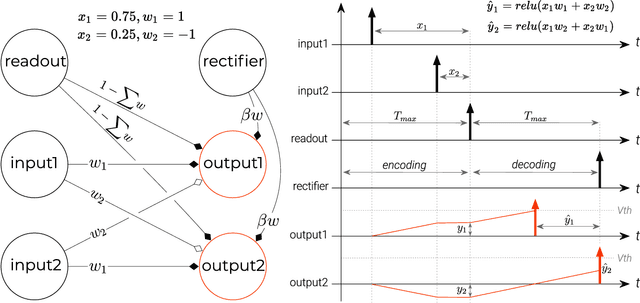

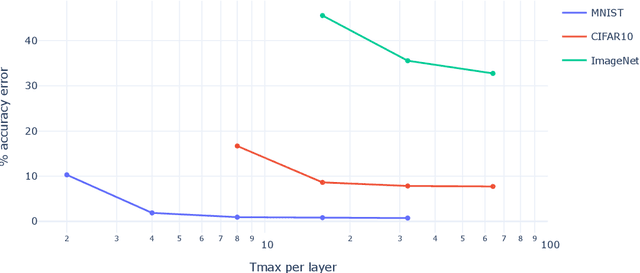

Spiking neural networks (SNNs) promise ultra-low-power applications by exploiting temporal and spatial sparsity. The number of binary activations, called spikes, is proportional to the power consumed when executed on neuromorphic hardware. Training such SNNs using backpropagation through time for vision tasks that rely mainly on spatial features is computationally costly. Training a stateless artificial neural network (ANN) to then convert the weights to an SNN is a straightforward alternative when it comes to image recognition datasets. Most conversion methods rely on rate coding in the SNN to represent ANN activation, which uses enormous amounts of spikes and, therefore, energy to encode information. Recently, temporal conversion methods have shown promising results requiring significantly fewer spikes per neuron, but sometimes complex neuron models. We propose a temporal ANN-to-SNN conversion method, which we call Quartz, that is based on the time to first spike (TTFS). Quartz achieves high classification accuracy and can be easily implemented on neuromorphic hardware while using the least amount of synaptic operations and memory accesses. It incurs a cost of two additional synapses per neuron compared to previous temporal conversion methods, which are readily available on neuromorphic hardware. We benchmark Quartz on MNIST, CIFAR10, and ImageNet in simulation to show the benefits of our method and follow up with an implementation on Loihi, a neuromorphic chip by Intel. We provide evidence that temporal coding has advantages in terms of power consumption, throughput, and latency for similar classification accuracy. Our code and models are publicly available.
NeuroBench: Advancing Neuromorphic Computing through Collaborative, Fair and Representative Benchmarking
Apr 15, 2023



The field of neuromorphic computing holds great promise in terms of advancing computing efficiency and capabilities by following brain-inspired principles. However, the rich diversity of techniques employed in neuromorphic research has resulted in a lack of clear standards for benchmarking, hindering effective evaluation of the advantages and strengths of neuromorphic methods compared to traditional deep-learning-based methods. This paper presents a collaborative effort, bringing together members from academia and the industry, to define benchmarks for neuromorphic computing: NeuroBench. The goals of NeuroBench are to be a collaborative, fair, and representative benchmark suite developed by the community, for the community. In this paper, we discuss the challenges associated with benchmarking neuromorphic solutions, and outline the key features of NeuroBench. We believe that NeuroBench will be a significant step towards defining standards that can unify the goals of neuromorphic computing and drive its technological progress. Please visit neurobench.ai for the latest updates on the benchmark tasks and metrics.
EXODUS: Stable and Efficient Training of Spiking Neural Networks
May 20, 2022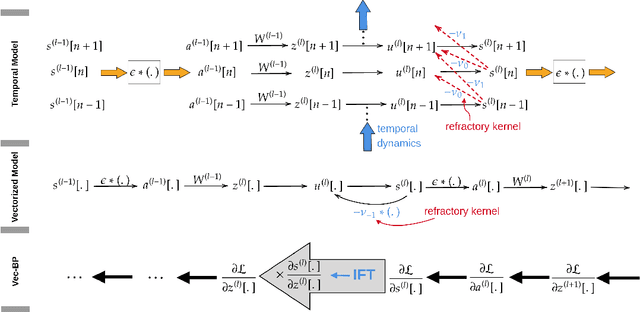
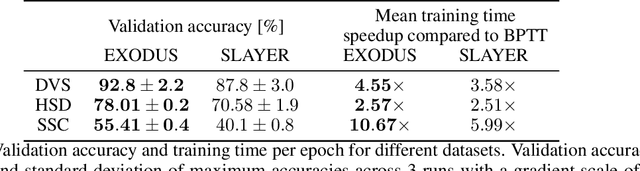
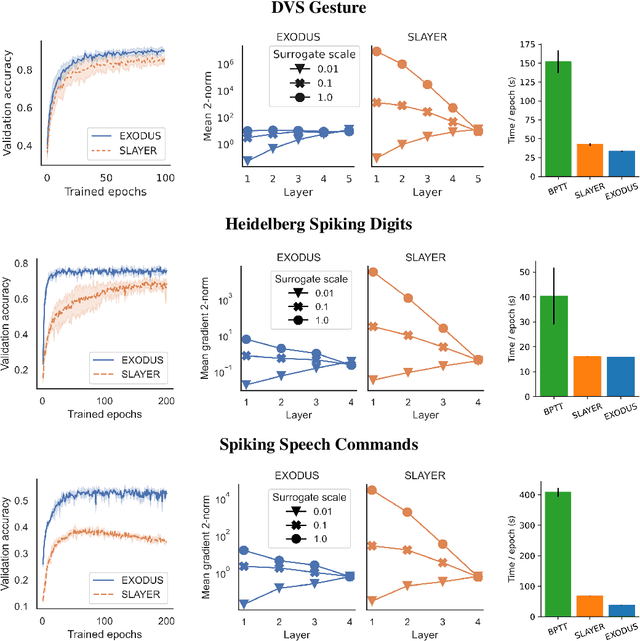
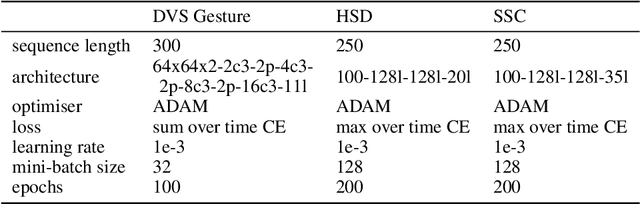
Spiking Neural Networks (SNNs) are gaining significant traction in machine learning tasks where energy-efficiency is of utmost importance. Training such networks using the state-of-the-art back-propagation through time (BPTT) is, however, very time-consuming. Previous work by Shrestha and Orchard [2018] employs an efficient GPU-accelerated back-propagation algorithm called SLAYER, which speeds up training considerably. SLAYER, however, does not take into account the neuron reset mechanism while computing the gradients, which we argue to be the source of numerical instability. To counteract this, SLAYER introduces a gradient scale hyperparameter across layers, which needs manual tuning. In this paper, (i) we modify SLAYER and design an algorithm called EXODUS, that accounts for the neuron reset mechanism and applies the Implicit Function Theorem (IFT) to calculate the correct gradients (equivalent to those computed by BPTT), (ii) we eliminate the need for ad-hoc scaling of gradients, thus, reducing the training complexity tremendously, (iii) we demonstrate, via computer simulations, that EXODUS is numerically stable and achieves a comparable or better performance than SLAYER especially in various tasks with SNNs that rely on temporal features. Our code is available at https://github.com/synsense/sinabs-exodus.
A Framework for Event-based Computer Vision on a Mobile Device
May 13, 2022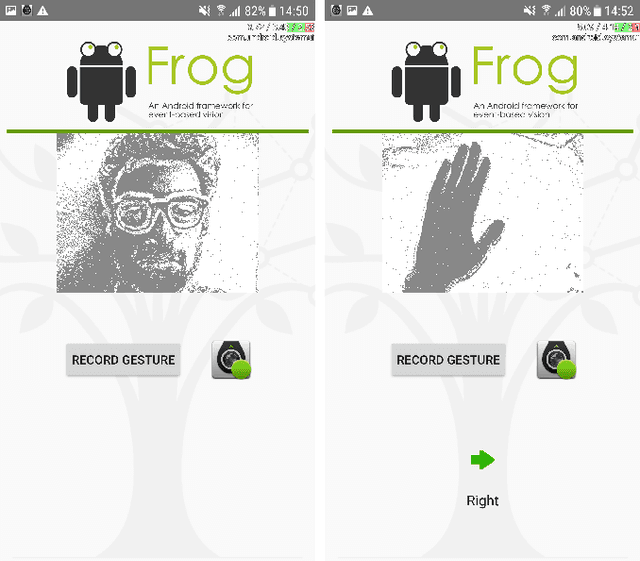
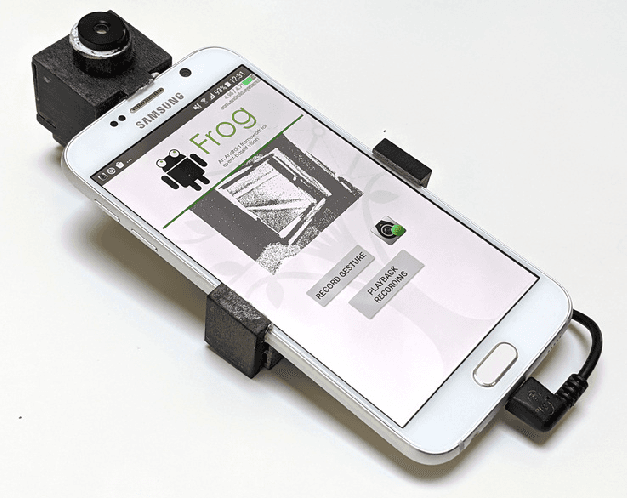

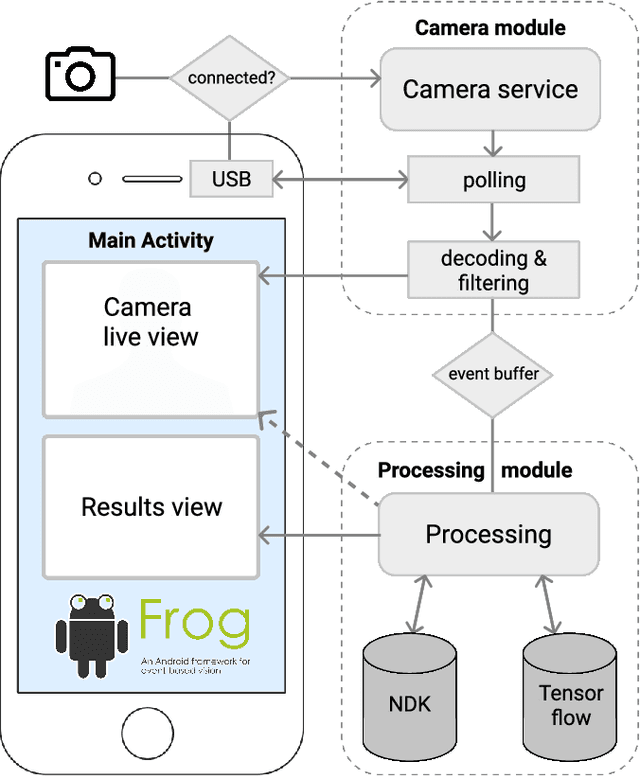
We present the first publicly available Android framework to stream data from an event camera directly to a mobile phone. Today's mobile devices handle a wider range of workloads than ever before and they incorporate a growing gamut of sensors that make devices smarter, more user friendly and secure. Conventional cameras in particular play a central role in such tasks, but they cannot record continuously, as the amount of redundant information recorded is costly to process. Bio-inspired event cameras on the other hand only record changes in a visual scene and have shown promising low-power applications that specifically suit mobile tasks such as face detection, gesture recognition or gaze tracking. Our prototype device is the first step towards embedding such an event camera into a battery-powered handheld device. The mobile framework allows us to stream events in real-time and opens up the possibilities for always-on and on-demand sensing on mobile phones. To liaise the asynchronous event camera output with synchronous von Neumann hardware, we look at how buffering events and processing them in batches can benefit mobile applications. We evaluate our framework in terms of latency and throughput and show examples of computer vision tasks that involve both event-by-event and pre-trained neural network methods for gesture recognition, aperture robust optical flow and grey-level image reconstruction from events. The code is available at https://github.com/neuromorphic-paris/frog
A sampling-based approach for efficient clustering in large datasets
Dec 29, 2021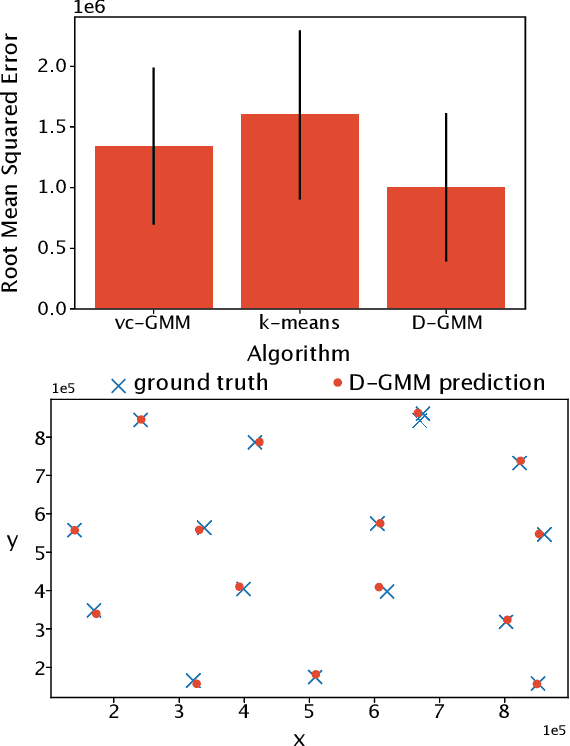
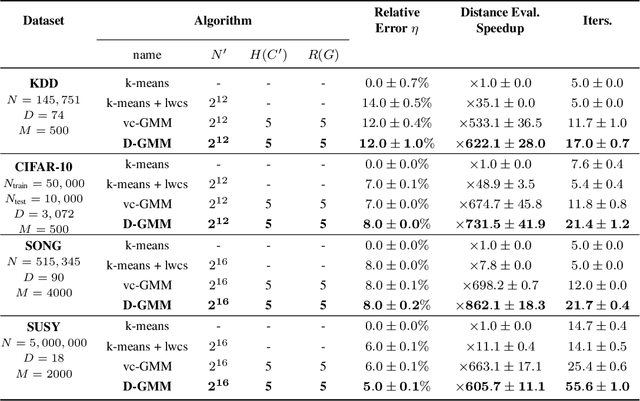
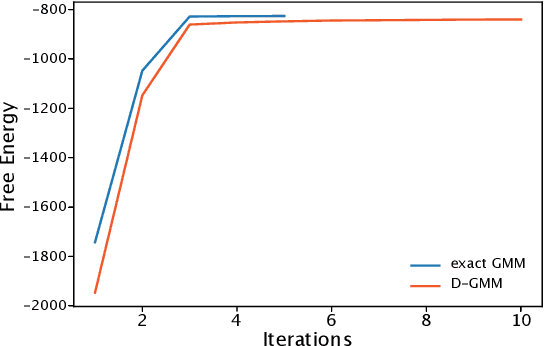
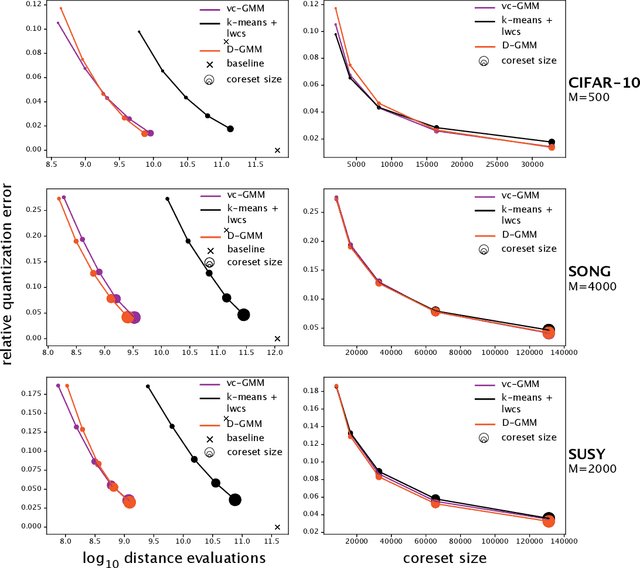
We propose a simple and efficient clustering method for high-dimensional data with a large number of clusters. Our algorithm achieves high-performance by evaluating distances of datapoints with a subset of the cluster centres. Our contribution is substantially more efficient than k-means as it does not require an all to all comparison of data points and clusters. We show that the optimal solutions of our approximation are the same as in the exact solution. However, our approach is considerably more efficient at extracting these clusters compared to the state-of-the-art. We compare our approximation with the exact k-means and alternative approximation approaches on a series of standardised clustering tasks. For the evaluation, we consider the algorithmic complexity, including number of operations to convergence, and the stability of the results.
Adversarial Attacks on Spiking Convolutional Networks for Event-based Vision
Oct 06, 2021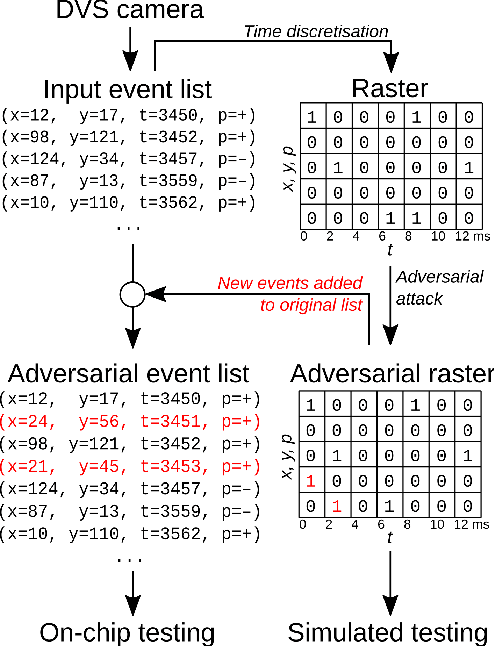
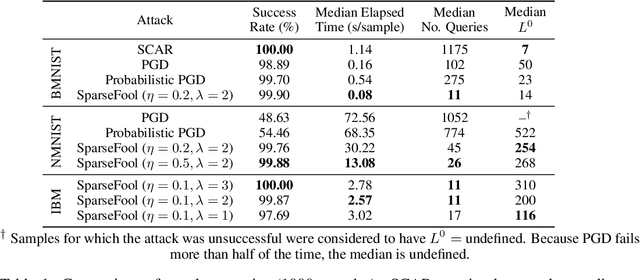
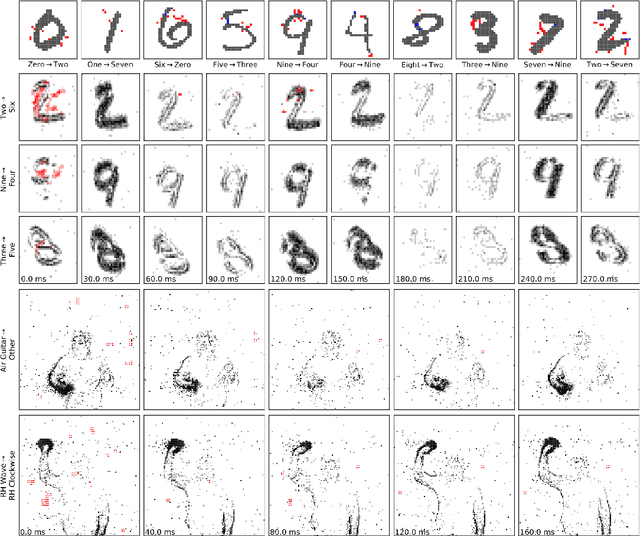

Event-based sensing using dynamic vision sensors is gaining traction in low-power vision applications. Spiking neural networks work well with the sparse nature of event-based data and suit deployment on low-power neuromorphic hardware. Being a nascent field, the sensitivity of spiking neural networks to potentially malicious adversarial attacks has received very little attention so far. In this work, we show how white-box adversarial attack algorithms can be adapted to the discrete and sparse nature of event-based visual data, and to the continuous-time setting of spiking neural networks. We test our methods on the N-MNIST and IBM Gestures neuromorphic vision datasets and show adversarial perturbations achieve a high success rate, by injecting a relatively small number of appropriately placed events. We also verify, for the first time, the effectiveness of these perturbations directly on neuromorphic hardware. Finally, we discuss the properties of the resulting perturbations and possible future directions.
Training Spiking Neural Networks Using Lessons From Deep Learning
Oct 01, 2021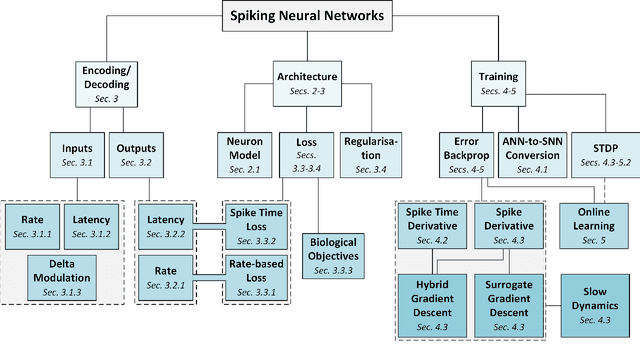
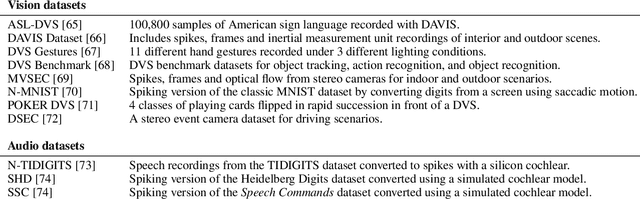
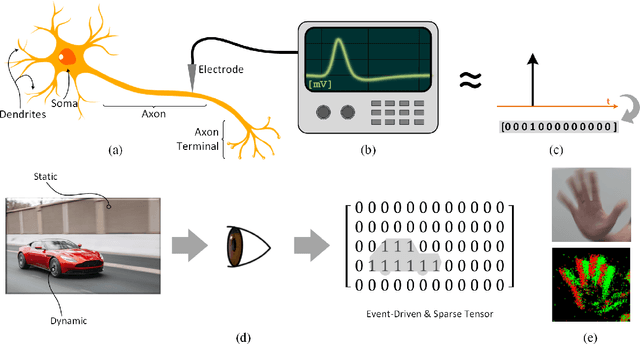
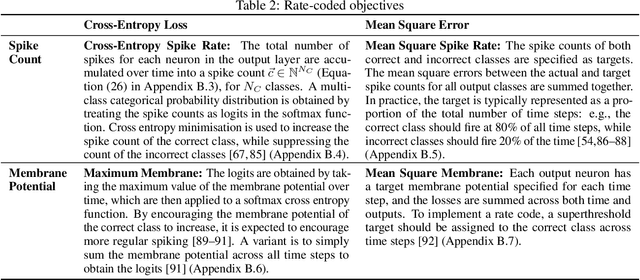
The brain is the perfect place to look for inspiration to develop more efficient neural networks. The inner workings of our synapses and neurons provide a glimpse at what the future of deep learning might look like. This paper serves as a tutorial and perspective showing how to apply the lessons learnt from several decades of research in deep learning, gradient descent, backpropagation and neuroscience to biologically plausible spiking neural neural networks. We also explore the delicate interplay between encoding data as spikes and the learning process; the challenges and solutions of applying gradient-based learning to spiking neural networks; the subtle link between temporal backpropagation and spike timing dependent plasticity, and how deep learning might move towards biologically plausible online learning. Some ideas are well accepted and commonly used amongst the neuromorphic engineering community, while others are presented or justified for the first time here. A series of companion interactive tutorials complementary to this paper using our Python package, snnTorch, are also made available: https://snntorch.readthedocs.io/en/latest/tutorials/index.html
Event-based Dynamic Face Detection and Tracking Based on Activity
Mar 27, 2018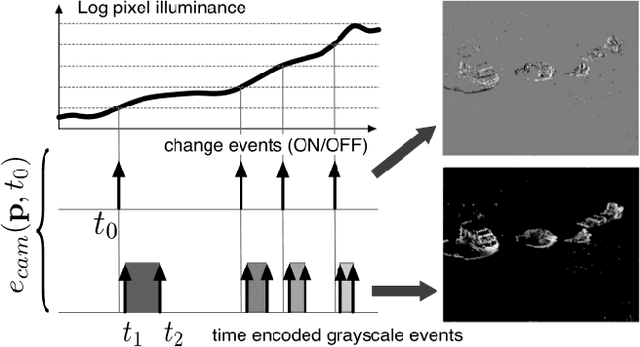
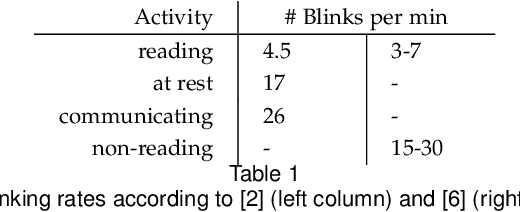
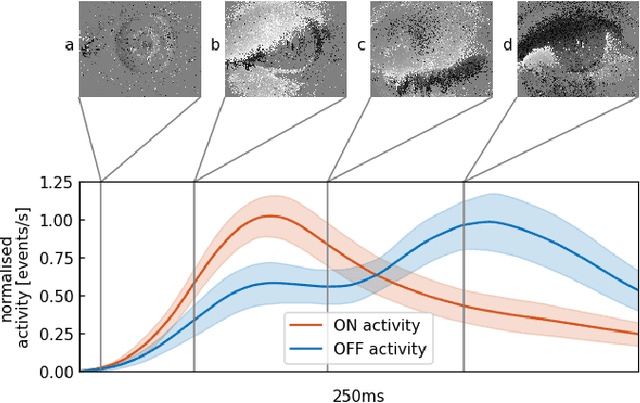
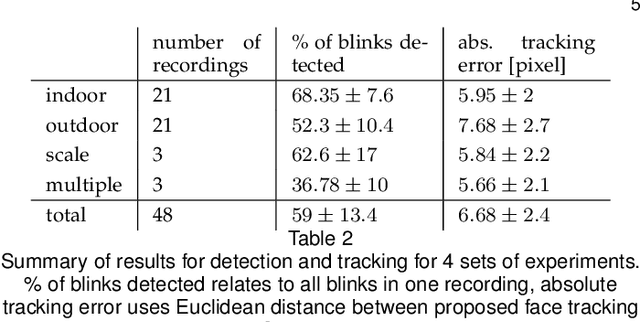
We present the first purely event-based approach for face detection using an ATIS, a neuromorphic camera. We look for pairs of blinking eyes by comparing local activity across the input frame to a predefined range, which is defined by the number of events per second in a specific location. If within range, the signal is checked for additional constraints such as duration, synchronicity and distance between the eyes. After a valid blink is registered, we await a second blink in the same spot to initiate Gaussian trackers above the eyes. Based on their position, a bounding box around the estimated outlines of the face is drawn. The face can then be tracked until it is occluded.