 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePCL-Reasoner-V1.5: Advancing Math Reasoning with Offline Reinforcement Learning
Jan 21, 2026We present PCL-Reasoner-V1.5, a 32-billion-parameter large language model (LLM) for mathematical reasoning. The model is built upon Qwen2.5-32B and refined via supervised fine-tuning (SFT) followed by reinforcement learning (RL). A central innovation is our proposed offline RL method, which provides superior training stability and efficiency over standard online RL methods such as GRPO. Our model achieves state-of-the-art performance among models post-trained on Qwen2.5-32B, attaining average accuracies of 90.9% on AIME 2024 and 85.6% on AIME 2025. Our work demonstrates offline RL as a stable and efficient paradigm for advancing reasoning in LLMs. All experiments were conducted on Huawei Ascend 910C NPUs.
AscendKernelGen: A Systematic Study of LLM-Based Kernel Generation for Neural Processing Units
Jan 12, 2026To meet the ever-increasing demand for computational efficiency, Neural Processing Units (NPUs) have become critical in modern AI infrastructure. However, unlocking their full potential requires developing high-performance compute kernels using vendor-specific Domain-Specific Languages (DSLs), a task that demands deep hardware expertise and is labor-intensive. While Large Language Models (LLMs) have shown promise in general code generation, they struggle with the strict constraints and scarcity of training data in the NPU domain. Our preliminary study reveals that state-of-the-art general-purpose LLMs fail to generate functional complex kernels for Ascend NPUs, yielding a near-zero success rate. To address these challenges, we propose AscendKernelGen, a generation-evaluation integrated framework for NPU kernel development. We introduce Ascend-CoT, a high-quality dataset incorporating chain-of-thought reasoning derived from real-world kernel implementations, and KernelGen-LM, a domain-adaptive model trained via supervised fine-tuning and reinforcement learning with execution feedback. Furthermore, we design NPUKernelBench, a comprehensive benchmark for assessing compilation, correctness, and performance across varying complexity levels. Experimental results demonstrate that our approach significantly bridges the gap between general LLMs and hardware-specific coding. Specifically, the compilation success rate on complex Level-2 kernels improves from 0% to 95.5% (Pass@10), while functional correctness achieves 64.3% compared to the baseline's complete failure. These results highlight the critical role of domain-specific reasoning and rigorous evaluation in automating accelerator-aware code generation.
Over-The-Air Phase Calibration of Spaceborne Phased Array for LEO Satellite Communications
Oct 09, 2025To avoid the unpredictable phase deviations of the spaceborne phased array (SPA), this paper considers the over-the-air (OTA) phase calibration of the SPA for the low earth orbit (LEO) satellite communications, where the phase deviations of the SPA and the unknown channel are jointly estimated with multiple transmissions of the pilots. Moreover, the Cramer Rao Bound (CRB) is derived, and the optimization of beam patterns is also presented to lower the root mean squared error (RMSE) of the OTA calibration. The simulation results verify the effectiveness of the proposed OTA phase calibration algorithm as the RMSEs of the phase estimates closely approach the corresponding CRB, and the beam pattern optimization scheme is also validated for more than 4dB gain of SNR over the randomly generated beam patterns.
Drive Any Mesh: 4D Latent Diffusion for Mesh Deformation from Video
Jun 09, 2025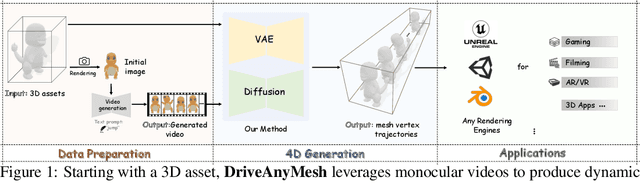
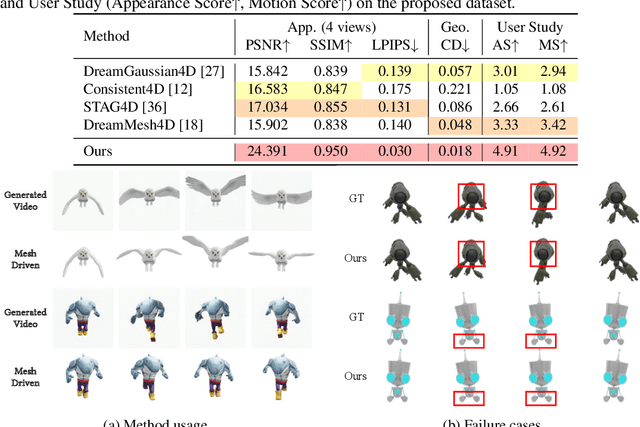
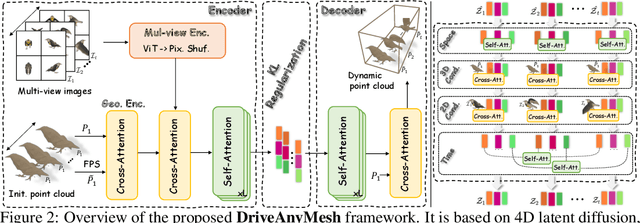
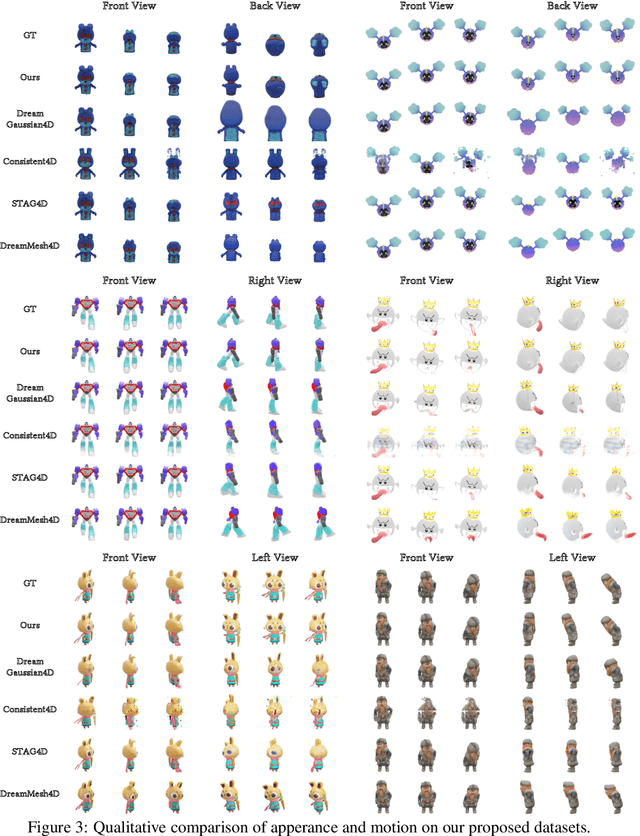
We propose DriveAnyMesh, a method for driving mesh guided by monocular video. Current 4D generation techniques encounter challenges with modern rendering engines. Implicit methods have low rendering efficiency and are unfriendly to rasterization-based engines, while skeletal methods demand significant manual effort and lack cross-category generalization. Animating existing 3D assets, instead of creating 4D assets from scratch, demands a deep understanding of the input's 3D structure. To tackle these challenges, we present a 4D diffusion model that denoises sequences of latent sets, which are then decoded to produce mesh animations from point cloud trajectory sequences. These latent sets leverage a transformer-based variational autoencoder, simultaneously capturing 3D shape and motion information. By employing a spatiotemporal, transformer-based diffusion model, information is exchanged across multiple latent frames, enhancing the efficiency and generalization of the generated results. Our experimental results demonstrate that DriveAnyMesh can rapidly produce high-quality animations for complex motions and is compatible with modern rendering engines. This method holds potential for applications in both the gaming and filming industries.
RLJP: Legal Judgment Prediction via First-Order Logic Rule-enhanced with Large Language Models
May 27, 2025Legal Judgment Prediction (LJP) is a pivotal task in legal AI. Existing semantic-enhanced LJP models integrate judicial precedents and legal knowledge for high performance. But they neglect legal reasoning logic, a critical component of legal judgments requiring rigorous logical analysis. Although some approaches utilize legal reasoning logic for high-quality predictions, their logic rigidity hinders adaptation to case-specific logical frameworks, particularly in complex cases that are lengthy and detailed. This paper proposes a rule-enhanced legal judgment prediction framework based on first-order logic (FOL) formalism and comparative learning (CL) to develop an adaptive adjustment mechanism for legal judgment logic and further enhance performance in LJP. Inspired by the process of human exam preparation, our method follows a three-stage approach: first, we initialize judgment rules using the FOL formalism to capture complex reasoning logic accurately; next, we propose a Confusion-aware Contrastive Learning (CACL) to dynamically optimize the judgment rules through a quiz consisting of confusable cases; finally, we utilize the optimized judgment rules to predict legal judgments. Experimental results on two public datasets show superior performance across all metrics. The code is publicly available{https://anonymous.4open.science/r/RLJP-FDF1}.
MGFF-TDNN: A Multi-Granularity Feature Fusion TDNN Model with Depth-Wise Separable Module for Speaker Verification
May 06, 2025In speaker verification, traditional models often emphasize modeling long-term contextual features to capture global speaker characteristics. However, this approach can neglect fine-grained voiceprint information, which contains highly discriminative features essential for robust speaker embeddings. This paper introduces a novel model architecture, termed MGFF-TDNN, based on multi-granularity feature fusion. The MGFF-TDNN leverages a two-dimensional depth-wise separable convolution module, enhanced with local feature modeling, as a front-end feature extractor to effectively capture time-frequency domain features. To achieve comprehensive multi-granularity feature fusion, we propose the M-TDNN structure, which integrates global contextual modeling with fine-grained feature extraction by combining time-delay neural networks and phoneme-level feature pooling. Experiments on the VoxCeleb dataset demonstrate that the MGFF-TDNN achieves outstanding performance in speaker verification while remaining efficient in terms of parameters and computational resources.
LPA3D: 3D Room-Level Scene Generation from In-the-Wild Images
Apr 03, 2025Generating realistic, room-level indoor scenes with semantically plausible and detailed appearances from in-the-wild images is crucial for various applications in VR, AR, and robotics. The success of NeRF-based generative methods indicates a promising direction to address this challenge. However, unlike their success at the object level, existing scene-level generative methods require additional information, such as multiple views, depth images, or semantic guidance, rather than relying solely on RGB images. This is because NeRF-based methods necessitate prior knowledge of camera poses, which is challenging to approximate for indoor scenes due to the complexity of defining alignment and the difficulty of globally estimating poses from a single image, given the unseen parts behind the camera. To address this challenge, we redefine global poses within the framework of Local-Pose-Alignment (LPA) -- an anchor-based multi-local-coordinate system that uses a selected number of anchors as the roots of these coordinates. Building on this foundation, we introduce LPA-GAN, a novel NeRF-based generative approach that incorporates specific modifications to estimate the priors of camera poses under LPA. It also co-optimizes the pose predictor and scene generation processes. Our ablation study and comparisons with straightforward extensions of NeRF-based object generative methods demonstrate the effectiveness of our approach. Furthermore, visual comparisons with other techniques reveal that our method achieves superior view-to-view consistency and semantic normality.
GSV3D: Gaussian Splatting-based Geometric Distillation with Stable Video Diffusion for Single-Image 3D Object Generation
Mar 08, 2025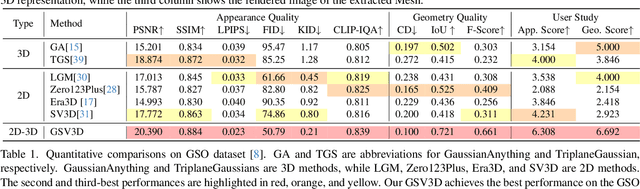
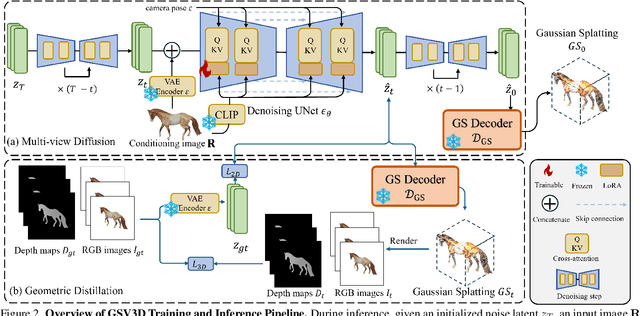
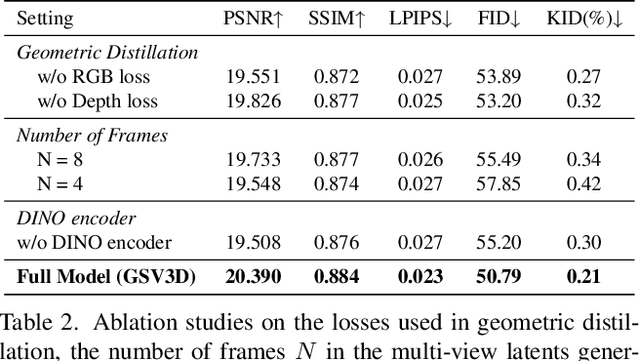
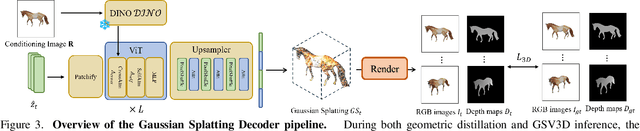
Image-based 3D generation has vast applications in robotics and gaming, where high-quality, diverse outputs and consistent 3D representations are crucial. However, existing methods have limitations: 3D diffusion models are limited by dataset scarcity and the absence of strong pre-trained priors, while 2D diffusion-based approaches struggle with geometric consistency. We propose a method that leverages 2D diffusion models' implicit 3D reasoning ability while ensuring 3D consistency via Gaussian-splatting-based geometric distillation. Specifically, the proposed Gaussian Splatting Decoder enforces 3D consistency by transforming SV3D latent outputs into an explicit 3D representation. Unlike SV3D, which only relies on implicit 2D representations for video generation, Gaussian Splatting explicitly encodes spatial and appearance attributes, enabling multi-view consistency through geometric constraints. These constraints correct view inconsistencies, ensuring robust geometric consistency. As a result, our approach simultaneously generates high-quality, multi-view-consistent images and accurate 3D models, providing a scalable solution for single-image-based 3D generation and bridging the gap between 2D Diffusion diversity and 3D structural coherence. Experimental results demonstrate state-of-the-art multi-view consistency and strong generalization across diverse datasets. The code will be made publicly available upon acceptance.
VGFL-SA: Vertical Graph Federated Learning Structure Attack Based on Contrastive Learning
Feb 24, 2025Graph Neural Networks (GNNs) have gained attention for their ability to learn representations from graph data. Due to privacy concerns and conflicts of interest that prevent clients from directly sharing graph data with one another, Vertical Graph Federated Learning (VGFL) frameworks have been developed. Recent studies have shown that VGFL is vulnerable to adversarial attacks that degrade performance. However, it is a common problem that client nodes are often unlabeled in the realm of VGFL. Consequently, the existing attacks, which rely on the availability of labeling information to obtain gradients, are inherently constrained in their applicability. This limitation precludes their deployment in practical, real-world environments. To address the above problems, we propose a novel graph adversarial attack against VGFL, referred to as VGFL-SA, to degrade the performance of VGFL by modifying the local clients structure without using labels. Specifically, VGFL-SA uses a contrastive learning method to complete the attack before the local clients are trained. VGFL-SA first accesses the graph structure and node feature information of the poisoned clients, and generates the contrastive views by node-degree-based edge augmentation and feature shuffling augmentation. Then, VGFL-SA uses the shared graph encoder to get the embedding of each view, and the gradients of the adjacency matrices are obtained by the contrastive function. Finally, perturbed edges are generated using gradient modification rules. We validated the performance of VGFL-SA by performing a node classification task on real-world datasets, and the results show that VGFL-SA achieves good attack effectiveness and transferability.
Multimodal Trajectory Prediction for Autonomous Driving on Unstructured Roads using Deep Convolutional Network
Sep 27, 2024



Recently, the application of autonomous driving in open-pit mining has garnered increasing attention for achieving safe and efficient mineral transportation. Compared to urban structured roads, unstructured roads in mining sites have uneven boundaries and lack clearly defined lane markings. This leads to a lack of sufficient constraint information for predicting the trajectories of other human-driven vehicles, resulting in higher uncertainty in trajectory prediction problems. A method is proposed to predict multiple possible trajectories and their probabilities of the target vehicle. The surrounding environment and historical trajectories of the target vehicle are encoded as a rasterized image, which is used as input to our deep convolutional network to predict the target vehicle's multiple possible trajectories. The method underwent offline testing on a dataset specifically designed for autonomous driving scenarios in open-pit mining and was compared and evaluated against physics-based method. The open-source code and data are available at https://github.com/LLsxyc/mine_motion_prediction.git