 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamicRouteGPT: A Real-Time Multi-Vehicle Dynamic Navigation Framework Based on Large Language Models
Aug 26, 2024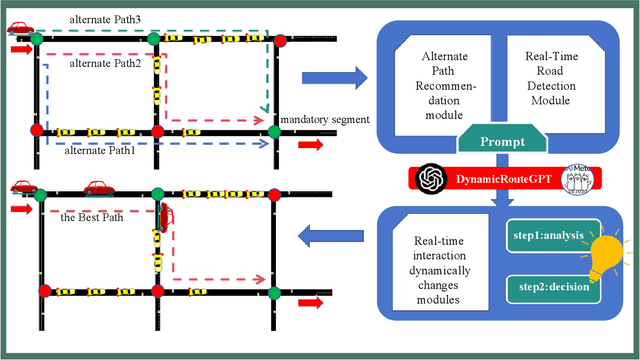



Real-time dynamic path planning in complex traffic environments presents challenges, such as varying traffic volumes and signal wait times. Traditional static routing algorithms like Dijkstra and A* compute shortest paths but often fail under dynamic conditions. Recent Reinforcement Learning (RL) approaches offer improvements but tend to focus on local optima, risking dead-ends or boundary issues. This paper proposes a novel approach based on causal inference for real-time dynamic path planning, balancing global and local optimality. We first use the static Dijkstra algorithm to compute a globally optimal baseline path. A distributed control strategy then guides vehicles along this path. At intersections, DynamicRouteGPT performs real-time decision-making for local path selection, considering real-time traffic, driving preferences, and unexpected events. DynamicRouteGPT integrates Markov chains, Bayesian inference, and large-scale pretrained language models like Llama3 8B to provide an efficient path planning solution. It dynamically adjusts to traffic scenarios and driver preferences and requires no pre-training, offering broad applicability across road networks. A key innovation is the construction of causal graphs for counterfactual reasoning, optimizing path decisions. Experimental results show that our method achieves state-of-the-art performance in real-time dynamic path planning for multiple vehicles while providing explainable path selections, offering a novel and efficient solution for complex traffic environments.