 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTilt-Ropter: A Novel Hybrid Aerial and Terrestrial Vehicle with Tilt Rotors and Passive Wheels
Feb 02, 2026In this work, we present Tilt-Ropter, a novel hybrid aerial-terrestrial vehicle (HATV) that combines tilt rotors with passive wheels to achieve energy-efficient multi-mode locomotion. Unlike existing under-actuated HATVs, the fully actuated design of Tilt-Ropter enables decoupled force and torque control, greatly enhancing its mobility and environmental adaptability. A nonlinear model predictive controller (NMPC) is developed to track reference trajectories and handle contact constraints across locomotion modes, while a dedicated control allocation module exploits actuation redundancy to achieve energy-efficient control of actuators. Additionally, to enhance robustness during ground contact, we introduce an external wrench estimation algorithm that estimates environmental interaction forces and torques in real time. The system is validated through both simulation and real-world experiments, including seamless air-ground transitions and trajectory tracking. Results show low tracking errors in both modes and highlight a 92.8% reduction in power consumption during ground locomotion, demonstrating the system's potential for long-duration missions across large-scale and energy-constrained environments.
FHGS: Feature-Homogenized Gaussian Splatting
May 25, 2025Scene understanding based on 3D Gaussian Splatting (3DGS) has recently achieved notable advances. Although 3DGS related methods have efficient rendering capabilities, they fail to address the inherent contradiction between the anisotropic color representation of gaussian primitives and the isotropic requirements of semantic features, leading to insufficient cross-view feature consistency. To overcome the limitation, we proposes $\textit{FHGS}$ (Feature-Homogenized Gaussian Splatting), a novel 3D feature fusion framework inspired by physical models, which can achieve high-precision mapping of arbitrary 2D features from pre-trained models to 3D scenes while preserving the real-time rendering efficiency of 3DGS. Specifically, our $\textit{FHGS}$ introduces the following innovations: Firstly, a universal feature fusion architecture is proposed, enabling robust embedding of large-scale pre-trained models' semantic features (e.g., SAM, CLIP) into sparse 3D structures. Secondly, a non-differentiable feature fusion mechanism is introduced, which enables semantic features to exhibit viewpoint independent isotropic distributions. This fundamentally balances the anisotropic rendering of gaussian primitives and the isotropic expression of features; Thirdly, a dual-driven optimization strategy inspired by electric potential fields is proposed, which combines external supervision from semantic feature fields with internal primitive clustering guidance. This mechanism enables synergistic optimization of global semantic alignment and local structural consistency. More interactive results can be accessed on: https://fhgs.cuastro.org/.
Cooperative Aerial Robot Inspection Challenge: A Benchmark for Heterogeneous Multi-UAV Planning and Lessons Learned
Jan 14, 2025



We propose the Cooperative Aerial Robot Inspection Challenge (CARIC), a simulation-based benchmark for motion planning algorithms in heterogeneous multi-UAV systems. CARIC features UAV teams with complementary sensors, realistic constraints, and evaluation metrics prioritizing inspection quality and efficiency. It offers a ready-to-use perception-control software stack and diverse scenarios to support the development and evaluation of task allocation and motion planning algorithms. Competitions using CARIC were held at IEEE CDC 2023 and the IROS 2024 Workshop on Multi-Robot Perception and Navigation, attracting innovative solutions from research teams worldwide. This paper examines the top three teams from CDC 2023, analyzing their exploration, inspection, and task allocation strategies while drawing insights into their performance across scenarios. The results highlight the task's complexity and suggest promising directions for future research in cooperative multi-UAV systems.
An Active Search Strategy with Multiple Unmanned Aerial Systems for Multiple Targets
Jun 24, 2024



The challenge of efficient target searching in vast natural environments has driven the need for advanced multi-UAV active search strategies. This paper introduces a novel method in which global and local information is adeptly merged to avoid issues such as myopia and redundant back-and-forth movements. In addition, a trajectory generation method is used to ensure the search pattern within continuous space. To further optimize multi-agent cooperation, the Voronoi partition technique is employed, ensuring a reduction in repetitive flight patterns and making the control of multiple agents in a decentralized way. Through a series of experiments, the evaluation and comparison results demonstrate the efficiency of our approach in various environments. The primary application of this innovative approach is demonstrated in the search for horseshoe crabs within their wild habitats, showcasing its potential to revolutionize ecological survey and conservation efforts.
UDE-based Dynamic Motion Force Control of Mobile Manipulators
Mar 30, 2024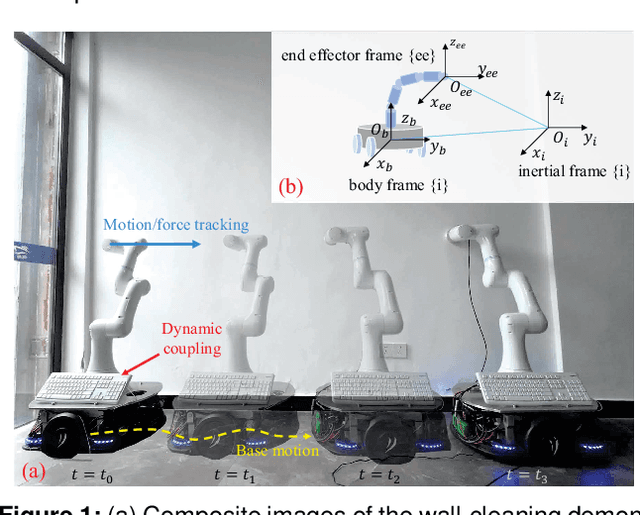
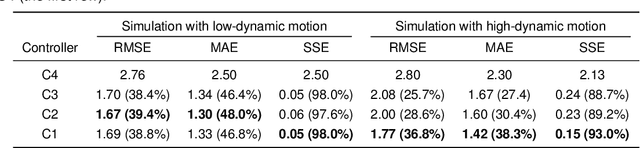
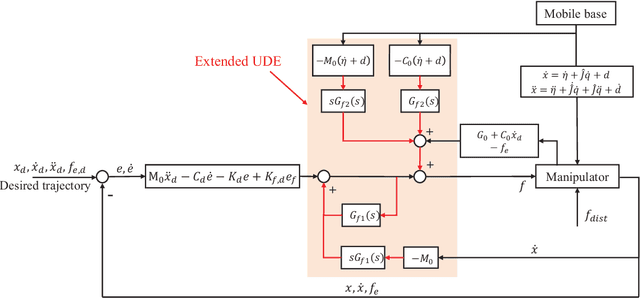
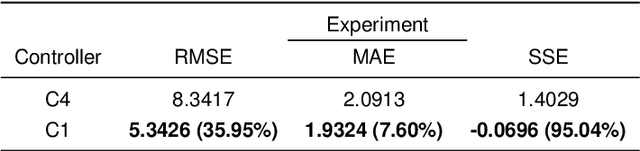
Mobile manipulators are known for their superior mobility over manipulators on fixed bases, offering promising applications in smart industry and housekeeping scenarios. However, the dynamic coupling nature between the mobile base and the manipulator presents challenges for the physical interactive tasks of the mobile manipulator. Current methods suffer from complex modeling processes and poor transferability. To address this, this article presents a novel dynamic model of the manipulator on the mobile base that requires only the manipulator dynamics and the kinematic information of the mobile base. In addition, embedding the dynamic model, an uncertainty and disturbance estimator-based (UDE-based) dynamic motion/force control scheme is proposed for the mobile manipulator, which compensates for the dynamic coupling and other unmodeled uncertainties. Passivity and stability analyses justify the proposed control law. Simulation and experimental results on our mobile manipulator platform demonstrate the feasibility and effectiveness of our proposed methodology.
A Real-Time Framework for Domain-Adaptive Underwater Object Detection with Image Enhancement
Mar 28, 2024



In recent years, significant progress has been made in the field of underwater image enhancement (UIE). However, its practical utility for high-level vision tasks, such as underwater object detection (UOD) in Autonomous Underwater Vehicles (AUVs), remains relatively unexplored. It may be attributed to several factors: (1) Existing methods typically employ UIE as a pre-processing step, which inevitably introduces considerable computational overhead and latency. (2) The process of enhancing images prior to training object detectors may not necessarily yield performance improvements. (3) The complex underwater environments can induce significant domain shifts across different scenarios, seriously deteriorating the UOD performance. To address these challenges, we introduce EnYOLO, an integrated real-time framework designed for simultaneous UIE and UOD with domain-adaptation capability. Specifically, both the UIE and UOD task heads share the same network backbone and utilize a lightweight design. Furthermore, to ensure balanced training for both tasks, we present a multi-stage training strategy aimed at consistently enhancing their performance. Additionally, we propose a novel domain-adaptation strategy to align feature embeddings originating from diverse underwater environments. Comprehensive experiments demonstrate that our framework not only achieves state-of-the-art (SOTA) performance in both UIE and UOD tasks, but also shows superior adaptability when applied to different underwater scenarios. Our efficiency analysis further highlights the substantial potential of our framework for onboard deployment.
Sensor-based Multi-Robot Search and Coverage with Spatial Separation in Unstructured Environments
Mar 04, 2024



Multi-robot systems have increasingly become instrumental in tackling search and coverage problems. However, the challenge of optimizing task efficiency without compromising task success still persists, particularly in expansive, unstructured environments with dense obstacles. This paper presents an innovative, decentralized Voronoi-based approach for search and coverage to reactively navigate these complexities while maintaining safety. This approach leverages the active sensing capabilities of multi-robot systems to supplement GIS (Geographic Information System), offering a more comprehensive and real-time understanding of the environment. Based on point cloud data, which is inherently non-convex and unstructured, this method efficiently generates collision-free Voronoi regions using only local sensing information through spatial decomposition and spherical mirroring techniques. Then, deadlock-aware guided map integrated with a gradient-optimized, centroid Voronoi-based coverage control policy, is constructed to improve efficiency by avoiding exhaustive searches and local sensing pitfalls. The effectiveness of our algorithm has been validated through extensive numerical simulations in high-fidelity environments, demonstrating significant improvements in both task success rate, coverage ratio, and task execution time compared with others.
Underwater motions analysis and control of a coupling-tiltable unmanned aerial-aquatic quadrotor
Dec 12, 2023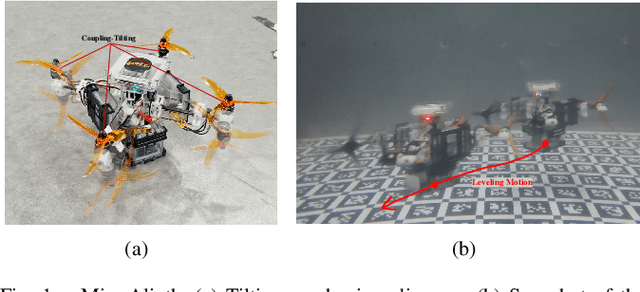
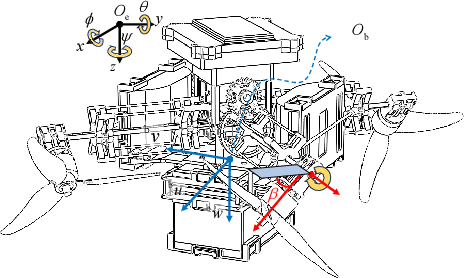
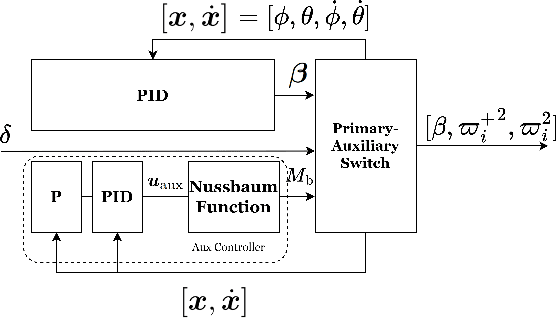
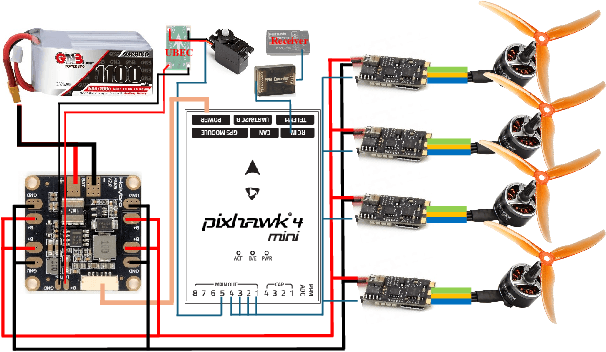
This paper proposes a method for analyzing a series of potential motions in a coupling-tiltable aerial-aquatic quadrotor based on its nonlinear dynamics. Some characteristics and constraints derived by this method are specified as Singular Thrust Tilt Angles (STTAs), utilizing to generate motions including planar motions. A switch-based control scheme addresses issues of control direction uncertainty inherent to the mechanical structure by incorporating a saturated Nussbaum function. A high-fidelity simulation environment incorporating a comprehensive hydrodynamic model is built based on a Hardware-In-The-Loop (HITL) setup with Gazebo and a flight control board. The experiments validate the effectiveness of the absolute and quasi planar motions, which cannot be achieved by conventional quadrotors, and demonstrate stable performance when the pitch or roll angle is activated in the auxiliary control channel.
OA-ECBVC: A Cooperative Collision-free Encirclement and Capture Approach in Cluttered Environments
Dec 03, 2023This article investigates the practical scenarios of chasing an adversarial evader in an unbounded environment with cluttered obstacles. We propose a Voronoi-based decentralized algorithm for multiple pursuers to encircle and capture the evader by reacting to collisions. An efficient approach is presented for constructing an obstacle-aware evader-centered bounded Voronoi cell (OA-ECBVC), which strictly ensures collision avoidance in various obstacle scenarios when pursuing the evader. The evader can be efficiently enclosed in a convex hull given random initial configurations. Furthermore, to cooperatively capture the evader, each pursuer continually compresses the boundary of its OA-ECBVC to quickly reduce the movement space of the evader while maintaining encirclement. Our OA-ECBVC algorithm is validated in various simulated environments with different dynamic systems of robots. Real-time performance of resisting uncertainties shows the superior reliability of our method for deployment on multiple robot platforms.
Air Bumper: A Collision Detection and Reaction Framework for Autonomous MAV Navigation
Jul 12, 2023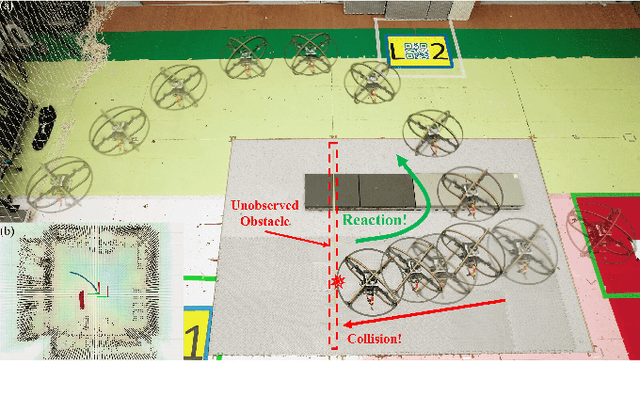
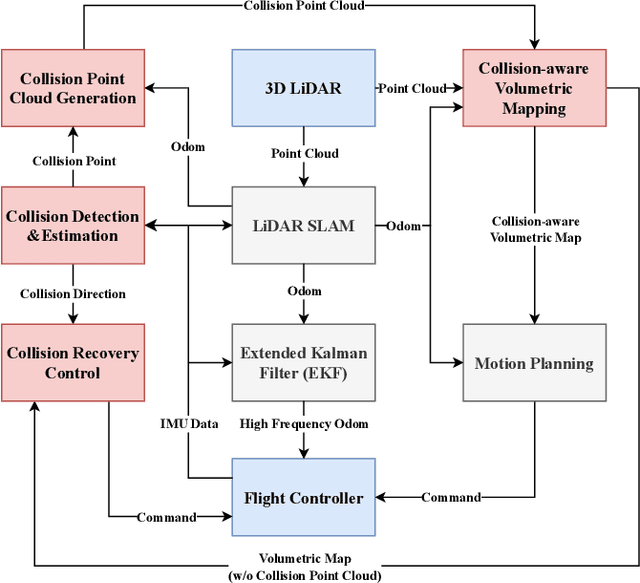
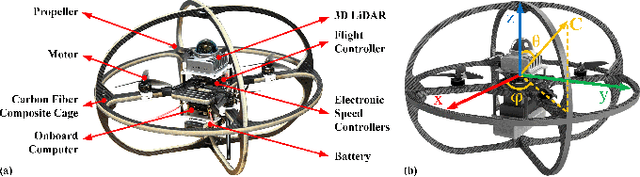
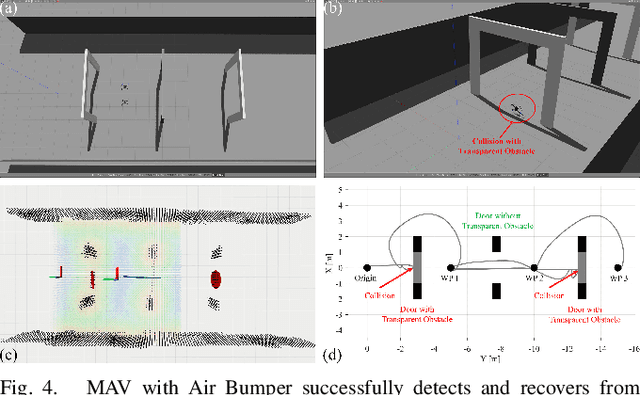
Autonomous navigation in unknown environments with obstacles remains challenging for micro aerial vehicles (MAVs) due to their limited onboard computing and sensing resources. Although various collision avoidance methods have been developed, it is still possible for drones to collide with unobserved obstacles due to unpredictable disturbances, sensor limitations, and control uncertainty. Instead of completely avoiding collisions, this article proposes Air Bumper, a collision detection and reaction framework, for fully autonomous flight in 3D environments to improve the safety of drones. Our framework only utilizes the onboard inertial measurement unit (IMU) to detect and estimate collisions. We further design a collision recovery control for rapid recovery and collision-aware mapping to integrate collision information into general LiDAR-based sensing and planning frameworks. Our simulation and experimental results show that the quadrotor can rapidly detect, estimate, and recover from collisions with obstacles in 3D space and continue the flight smoothly with the help of the collision-aware map.