 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAPOM: Task-Space Topology-Guided Motion Planning for Manipulating Elongated Object in Cluttered Environments
Nov 07, 2025Robotic manipulation in complex, constrained spaces is vital for widespread applications but challenging, particularly when navigating narrow passages with elongated objects. Existing planning methods often fail in these low-clearance scenarios due to the sampling difficulties or the local minima. This work proposes Topology-Aware Planning for Object Manipulation (TAPOM), which explicitly incorporates task-space topological analysis to enable efficient planning. TAPOM uses a high-level analysis to identify critical pathways and generate guiding keyframes, which are utilized in a low-level planner to find feasible configuration space trajectories. Experimental validation demonstrates significantly high success rates and improved efficiency over state-of-the-art methods on low-clearance manipulation tasks. This approach offers broad implications for enhancing manipulation capabilities of robots in complex real-world environments.
ShiftAddAug: Augment Multiplication-Free Tiny Neural Network with Hybrid Computation
Jul 03, 2024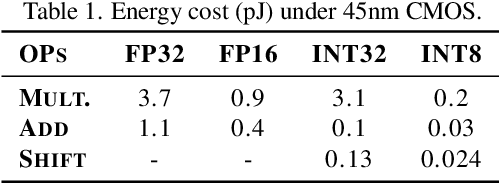
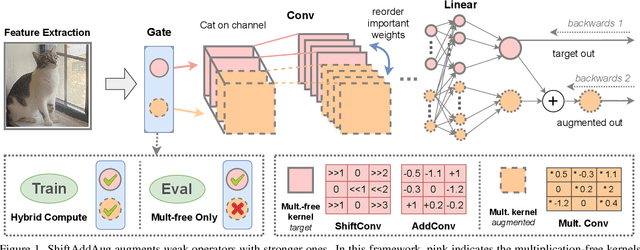
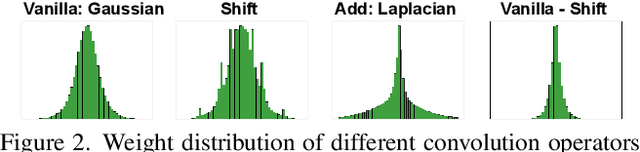

Operators devoid of multiplication, such as Shift and Add, have gained prominence for their compatibility with hardware. However, neural networks (NNs) employing these operators typically exhibit lower accuracy compared to conventional NNs with identical structures. ShiftAddAug uses costly multiplication to augment efficient but less powerful multiplication-free operators, improving performance without any inference overhead. It puts a ShiftAdd tiny NN into a large multiplicative model and encourages it to be trained as a sub-model to obtain additional supervision. In order to solve the weight discrepancy problem between hybrid operators, a new weight sharing method is proposed. Additionally, a novel two stage neural architecture search is used to obtain better augmentation effects for smaller but stronger multiplication-free tiny neural networks. The superiority of ShiftAddAug is validated through experiments in image classification and semantic segmentation, consistently delivering noteworthy enhancements. Remarkably, it secures up to a 4.95% increase in accuracy on the CIFAR100 compared to its directly trained counterparts, even surpassing the performance of multiplicative NNs.
Efficient Fusion and Task Guided Embedding for End-to-end Autonomous Driving
Jul 03, 2024To address the challenges of sensor fusion and safety risk prediction, contemporary closed-loop autonomous driving neural networks leveraging imitation learning typically require a substantial volume of parameters and computational resources to run neural networks. Given the constrained computational capacities of onboard vehicular computers, we introduce a compact yet potent solution named EfficientFuser. This approach employs EfficientViT for visual information extraction and integrates feature maps via cross attention. Subsequently, it utilizes a decoder-only transformer for the amalgamation of multiple features. For prediction purposes, learnable vectors are embedded as tokens to probe the association between the task and sensor features through attention. Evaluated on the CARLA simulation platform, EfficientFuser demonstrates remarkable efficiency, utilizing merely 37.6% of the parameters and 8.7% of the computations compared to the state-of-the-art lightweight method with only 0.4% lower driving score, and the safety score neared that of the leading safety-enhanced method, showcasing its efficacy and potential for practical deployment in autonomous driving systems.
GPTQT: Quantize Large Language Models Twice to Push the Efficiency
Jul 03, 2024Due to their large size, generative Large Language Models (LLMs) require significant computing and storage resources. This paper introduces a new post-training quantization method, GPTQT, to reduce memory usage and enhance processing speed by expressing the weight of LLM in 3bit/2bit. Practice has shown that minimizing the quantization error of weights is ineffective, leading to overfitting. Therefore, GPTQT employs a progressive two-step approach: initially quantizing weights using Linear quantization to a relatively high bit, followed by converting obtained int weight to lower bit binary coding. A re-explore strategy is proposed to optimize initial scaling factor. During inference, these steps are merged into pure binary coding, enabling efficient computation. Testing across various models and datasets confirms GPTQT's effectiveness. Compared to the strong 3-bit quantization baseline, GPTQT further reduces perplexity by 4.01 on opt-66B and increases speed by 1.24 times on opt-30b. The results on Llama2 show that GPTQT is currently the best binary coding quantization method for such kind of LLMs.
UDE-based Dynamic Motion Force Control of Mobile Manipulators
Mar 30, 2024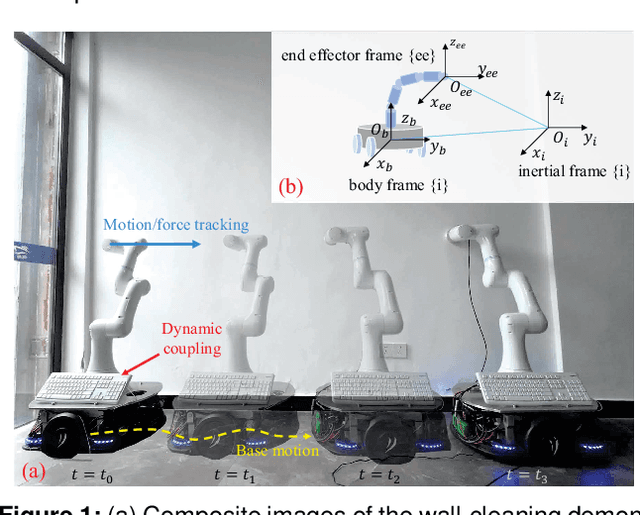
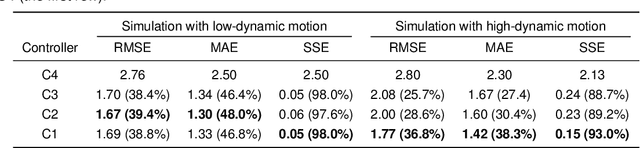
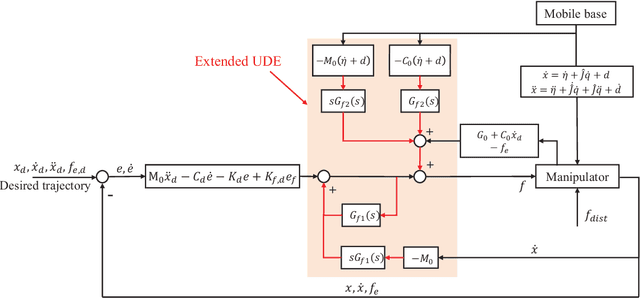
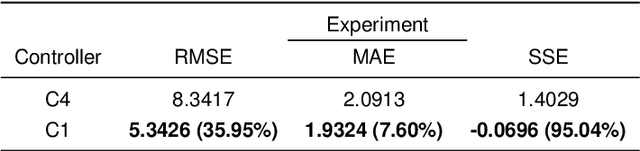
Mobile manipulators are known for their superior mobility over manipulators on fixed bases, offering promising applications in smart industry and housekeeping scenarios. However, the dynamic coupling nature between the mobile base and the manipulator presents challenges for the physical interactive tasks of the mobile manipulator. Current methods suffer from complex modeling processes and poor transferability. To address this, this article presents a novel dynamic model of the manipulator on the mobile base that requires only the manipulator dynamics and the kinematic information of the mobile base. In addition, embedding the dynamic model, an uncertainty and disturbance estimator-based (UDE-based) dynamic motion/force control scheme is proposed for the mobile manipulator, which compensates for the dynamic coupling and other unmodeled uncertainties. Passivity and stability analyses justify the proposed control law. Simulation and experimental results on our mobile manipulator platform demonstrate the feasibility and effectiveness of our proposed methodology.
Unleashing the Potential of Spiking Neural Networks for Sequential Modeling with Contextual Embedding
Aug 29, 2023The human brain exhibits remarkable abilities in integrating temporally distant sensory inputs for decision-making. However, existing brain-inspired spiking neural networks (SNNs) have struggled to match their biological counterpart in modeling long-term temporal relationships. To address this problem, this paper presents a novel Contextual Embedding Leaky Integrate-and-Fire (CE-LIF) spiking neuron model. Specifically, the CE-LIF model incorporates a meticulously designed contextual embedding component into the adaptive neuronal firing threshold, thereby enhancing the memory storage of spiking neurons and facilitating effective sequential modeling. Additionally, theoretical analysis is provided to elucidate how the CE-LIF model enables long-term temporal credit assignment. Remarkably, when compared to state-of-the-art recurrent SNNs, feedforward SNNs comprising the proposed CE-LIF neurons demonstrate superior performance across extensive sequential modeling tasks in terms of classification accuracy, network convergence speed, and memory capacity.
TJ-FlyingFish: Design and Implementation of an Aerial-Aquatic Quadrotor with Tiltable Propulsion Units
Feb 07, 2023



Aerial-aquatic vehicles are capable to move in the two most dominant fluids, making them more promising for a wide range of applications. We propose a prototype with special designs for propulsion and thruster configuration to cope with the vast differences in the fluid properties of water and air. For propulsion, the operating range is switched for the different mediums by the dual-speed propulsion unit, providing sufficient thrust and also ensuring output efficiency. For thruster configuration, thrust vectoring is realized by the rotation of the propulsion unit around the mount arm, thus enhancing the underwater maneuverability. This paper presents a quadrotor prototype of this concept and the design details and realization in practice.
Control of Pneumatic Artificial Muscles with SNN-based Cerebellar-like Model
Sep 22, 2021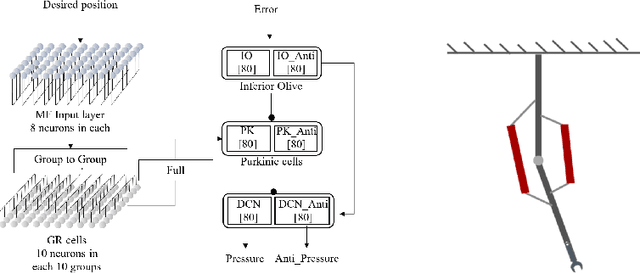
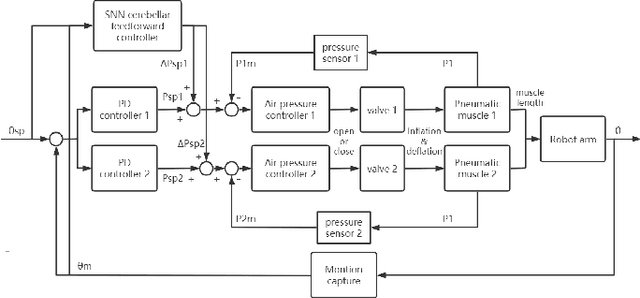
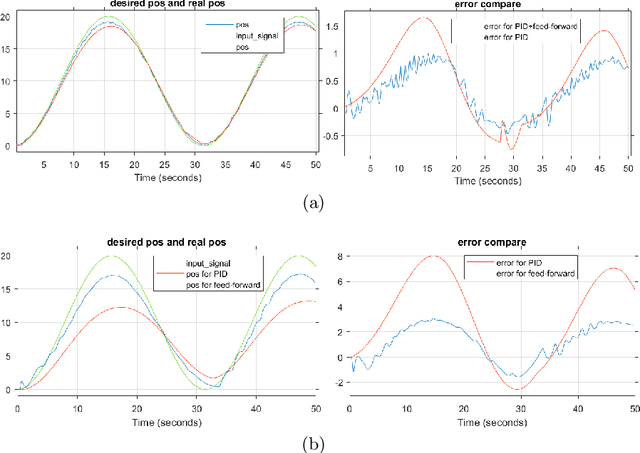
Soft robotics technologies have gained growing interest in recent years, which allows various applications from manufacturing to human-robot interaction. Pneumatic artificial muscle (PAM), a typical soft actuator, has been widely applied to soft robots. The compliance and resilience of soft actuators allow soft robots to behave compliant when interacting with unstructured environments, while the utilization of soft actuators also introduces nonlinearity and uncertainty. Inspired by Cerebellum's vital functions in control of human's physical movement, a neural network model of Cerebellum based on spiking neuron networks (SNNs) is designed. This model is used as a feed-forward controller in controlling a 1-DOF robot arm driven by PAMs. The simulation results show that this Cerebellar-based system achieves good performance and increases the system's response.