 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTilt-Ropter: A Novel Hybrid Aerial and Terrestrial Vehicle with Tilt Rotors and Passive Wheels
Feb 02, 2026In this work, we present Tilt-Ropter, a novel hybrid aerial-terrestrial vehicle (HATV) that combines tilt rotors with passive wheels to achieve energy-efficient multi-mode locomotion. Unlike existing under-actuated HATVs, the fully actuated design of Tilt-Ropter enables decoupled force and torque control, greatly enhancing its mobility and environmental adaptability. A nonlinear model predictive controller (NMPC) is developed to track reference trajectories and handle contact constraints across locomotion modes, while a dedicated control allocation module exploits actuation redundancy to achieve energy-efficient control of actuators. Additionally, to enhance robustness during ground contact, we introduce an external wrench estimation algorithm that estimates environmental interaction forces and torques in real time. The system is validated through both simulation and real-world experiments, including seamless air-ground transitions and trajectory tracking. Results show low tracking errors in both modes and highlight a 92.8% reduction in power consumption during ground locomotion, demonstrating the system's potential for long-duration missions across large-scale and energy-constrained environments.
TrackingMiM: Efficient Mamba-in-Mamba Serialization for Real-time UAV Object Tracking
Jul 02, 2025The Vision Transformer (ViT) model has long struggled with the challenge of quadratic complexity, a limitation that becomes especially critical in unmanned aerial vehicle (UAV) tracking systems, where data must be processed in real time. In this study, we explore the recently proposed State-Space Model, Mamba, leveraging its computational efficiency and capability for long-sequence modeling to effectively process dense image sequences in tracking tasks. First, we highlight the issue of temporal inconsistency in existing Mamba-based methods, specifically the failure to account for temporal continuity in the Mamba scanning mechanism. Secondly, building upon this insight,we propose TrackingMiM, a Mamba-in-Mamba architecture, a minimal-computation burden model for handling image sequence of tracking problem. In our framework, the mamba scan is performed in a nested way while independently process temporal and spatial coherent patch tokens. While the template frame is encoded as query token and utilized for tracking in every scan. Extensive experiments conducted on five UAV tracking benchmarks confirm that the proposed TrackingMiM achieves state-of-the-art precision while offering noticeable higher speed in UAV tracking.
A Real-Time Framework for Domain-Adaptive Underwater Object Detection with Image Enhancement
Mar 28, 2024



In recent years, significant progress has been made in the field of underwater image enhancement (UIE). However, its practical utility for high-level vision tasks, such as underwater object detection (UOD) in Autonomous Underwater Vehicles (AUVs), remains relatively unexplored. It may be attributed to several factors: (1) Existing methods typically employ UIE as a pre-processing step, which inevitably introduces considerable computational overhead and latency. (2) The process of enhancing images prior to training object detectors may not necessarily yield performance improvements. (3) The complex underwater environments can induce significant domain shifts across different scenarios, seriously deteriorating the UOD performance. To address these challenges, we introduce EnYOLO, an integrated real-time framework designed for simultaneous UIE and UOD with domain-adaptation capability. Specifically, both the UIE and UOD task heads share the same network backbone and utilize a lightweight design. Furthermore, to ensure balanced training for both tasks, we present a multi-stage training strategy aimed at consistently enhancing their performance. Additionally, we propose a novel domain-adaptation strategy to align feature embeddings originating from diverse underwater environments. Comprehensive experiments demonstrate that our framework not only achieves state-of-the-art (SOTA) performance in both UIE and UOD tasks, but also shows superior adaptability when applied to different underwater scenarios. Our efficiency analysis further highlights the substantial potential of our framework for onboard deployment.
Underwater motions analysis and control of a coupling-tiltable unmanned aerial-aquatic quadrotor
Dec 12, 2023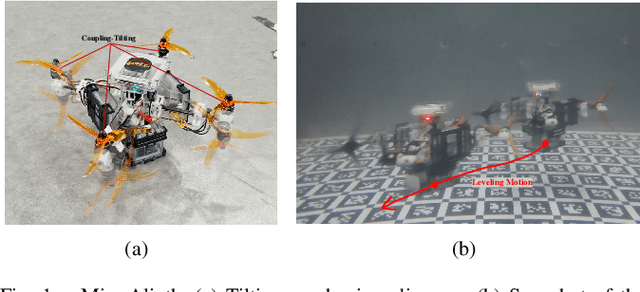
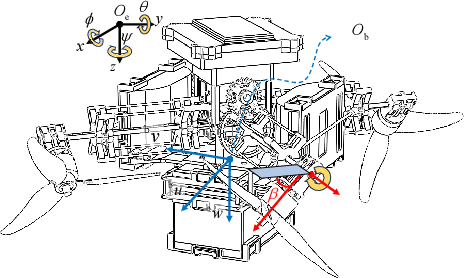
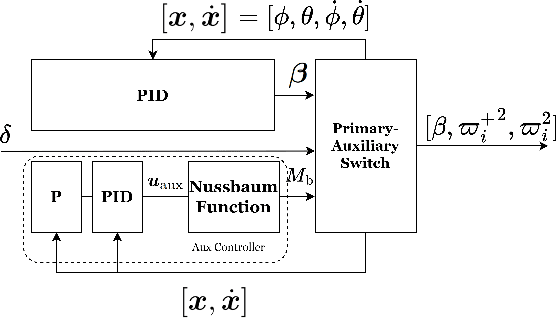
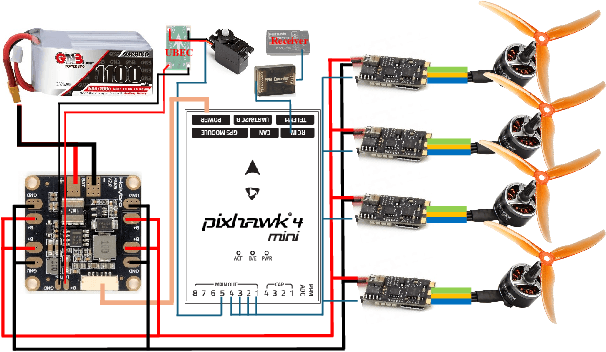
This paper proposes a method for analyzing a series of potential motions in a coupling-tiltable aerial-aquatic quadrotor based on its nonlinear dynamics. Some characteristics and constraints derived by this method are specified as Singular Thrust Tilt Angles (STTAs), utilizing to generate motions including planar motions. A switch-based control scheme addresses issues of control direction uncertainty inherent to the mechanical structure by incorporating a saturated Nussbaum function. A high-fidelity simulation environment incorporating a comprehensive hydrodynamic model is built based on a Hardware-In-The-Loop (HITL) setup with Gazebo and a flight control board. The experiments validate the effectiveness of the absolute and quasi planar motions, which cannot be achieved by conventional quadrotors, and demonstrate stable performance when the pitch or roll angle is activated in the auxiliary control channel.
InDL: A New Dataset and Benchmark for In-Diagram Logic Interpretation based on Visual Illusion
Jun 05, 2023This paper introduces a novel approach to evaluating deep learning models' capacity for in-diagram logic interpretation. Leveraging the intriguing realm of visual illusions, we establish a unique dataset, InDL, designed to rigorously test and benchmark these models. Deep learning has witnessed remarkable progress in domains such as computer vision and natural language processing. However, models often stumble in tasks requiring logical reasoning due to their inherent 'black box' characteristics, which obscure the decision-making process. Our work presents a new lens to understand these models better by focusing on their handling of visual illusions -- a complex interplay of perception and logic. We utilize six classic geometric optical illusions to create a comparative framework between human and machine visual perception. This methodology offers a quantifiable measure to rank models, elucidating potential weaknesses and providing actionable insights for model improvements. Our experimental results affirm the efficacy of our benchmarking strategy, demonstrating its ability to effectively rank models based on their logic interpretation ability. As part of our commitment to reproducible research, the source code and datasets will be made publicly available at https://github.com/rabbit-magic-wh/InDL
TJ-FlyingFish: Design and Implementation of an Aerial-Aquatic Quadrotor with Tiltable Propulsion Units
Feb 07, 2023



Aerial-aquatic vehicles are capable to move in the two most dominant fluids, making them more promising for a wide range of applications. We propose a prototype with special designs for propulsion and thruster configuration to cope with the vast differences in the fluid properties of water and air. For propulsion, the operating range is switched for the different mediums by the dual-speed propulsion unit, providing sufficient thrust and also ensuring output efficiency. For thruster configuration, thrust vectoring is realized by the rotation of the propulsion unit around the mount arm, thus enhancing the underwater maneuverability. This paper presents a quadrotor prototype of this concept and the design details and realization in practice.