 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater motions analysis and control of a coupling-tiltable unmanned aerial-aquatic quadrotor
Paper and Code
Dec 12, 2023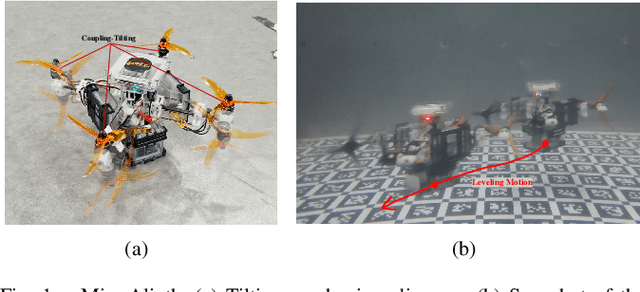
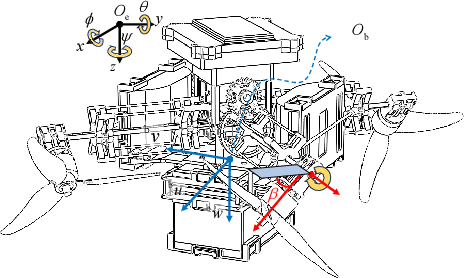
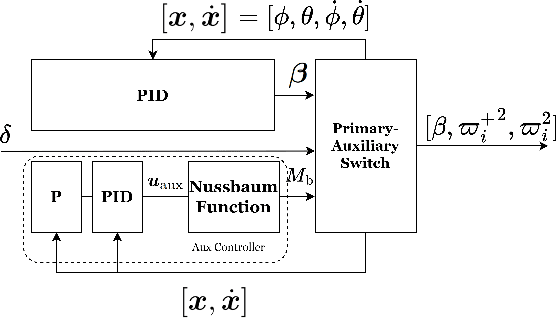
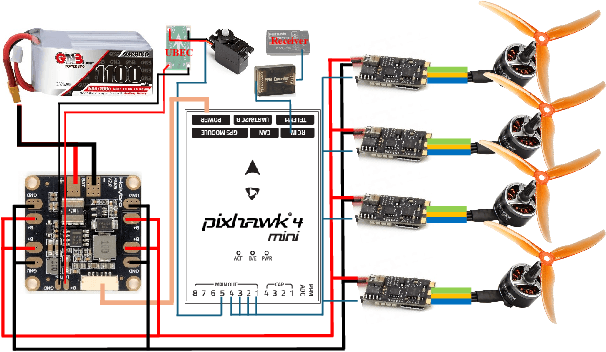
This paper proposes a method for analyzing a series of potential motions in a coupling-tiltable aerial-aquatic quadrotor based on its nonlinear dynamics. Some characteristics and constraints derived by this method are specified as Singular Thrust Tilt Angles (STTAs), utilizing to generate motions including planar motions. A switch-based control scheme addresses issues of control direction uncertainty inherent to the mechanical structure by incorporating a saturated Nussbaum function. A high-fidelity simulation environment incorporating a comprehensive hydrodynamic model is built based on a Hardware-In-The-Loop (HITL) setup with Gazebo and a flight control board. The experiments validate the effectiveness of the absolute and quasi planar motions, which cannot be achieved by conventional quadrotors, and demonstrate stable performance when the pitch or roll angle is activated in the auxiliary control channel.