 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCOPE: Skeleton Graph-Based Computation-Efficient Framework for Autonomous UAV Exploration
Feb 26, 2026Autonomous exploration in unknown environments is key for mobile robots, helping them perceive, map, and make decisions in complex areas. However, current methods often rely on frequent global optimization, suffering from high computational latency and trajectory oscillation, especially on resource-constrained edge devices. To address these limitations, we propose SCOPE, a novel framework that incrementally constructs a real-time skeletal graph and introduces Implicit Unknown Region Analysis for efficient spatial reasoning. The planning layer adopts a hierarchical on-demand strategy: the Proximal Planner generates smooth, high-frequency local trajectories, while the Region-Sequence Planner is activated only when necessary to optimize global visitation order. Comparative evaluations in simulation demonstrate that SCOPE achieves competitive exploration performance comparable to state-of-the-art global planners, while reducing computational cost by an average of 86.9%. Real-world experiments further validate the system's robustness and low latency in practical scenarios.
COMPASS: Confined-space Manipulation Planning with Active Sensing Strategy
Sep 18, 2025Manipulation in confined and cluttered environments remains a significant challenge due to partial observability and complex configuration spaces. Effective manipulation in such environments requires an intelligent exploration strategy to safely understand the scene and search the target. In this paper, we propose COMPASS, a multi-stage exploration and manipulation framework featuring a manipulation-aware sampling-based planner. First, we reduce collision risks with a near-field awareness scan to build a local collision map. Additionally, we employ a multi-objective utility function to find viewpoints that are both informative and conducive to subsequent manipulation. Moreover, we perform a constrained manipulation optimization strategy to generate manipulation poses that respect obstacle constraints. To systematically evaluate method's performance under these difficulties, we propose a benchmark of confined-space exploration and manipulation containing four level challenging scenarios. Compared to exploration methods designed for other robots and only considering information gain, our framework increases manipulation success rate by 24.25% in simulations. Real-world experiments demonstrate our method's capability for active sensing and manipulation in confined environments.
Underwater motions analysis and control of a coupling-tiltable unmanned aerial-aquatic quadrotor
Dec 12, 2023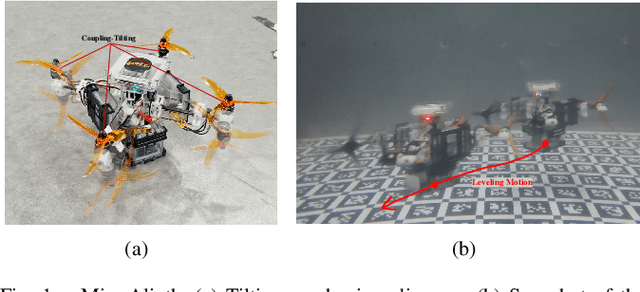
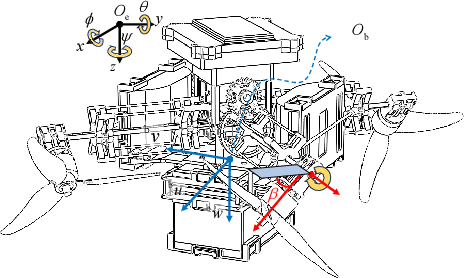
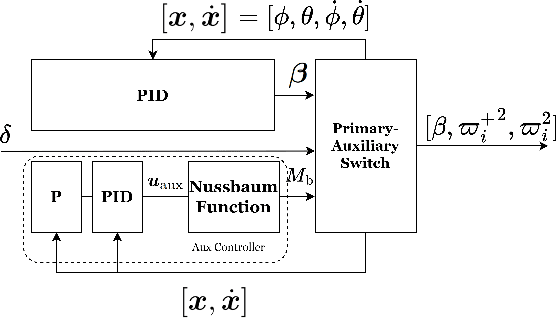
This paper proposes a method for analyzing a series of potential motions in a coupling-tiltable aerial-aquatic quadrotor based on its nonlinear dynamics. Some characteristics and constraints derived by this method are specified as Singular Thrust Tilt Angles (STTAs), utilizing to generate motions including planar motions. A switch-based control scheme addresses issues of control direction uncertainty inherent to the mechanical structure by incorporating a saturated Nussbaum function. A high-fidelity simulation environment incorporating a comprehensive hydrodynamic model is built based on a Hardware-In-The-Loop (HITL) setup with Gazebo and a flight control board. The experiments validate the effectiveness of the absolute and quasi planar motions, which cannot be achieved by conventional quadrotors, and demonstrate stable performance when the pitch or roll angle is activated in the auxiliary control channel.
Fast Event-based Double Integral for Real-time Robotics
May 10, 2023Motion deblurring is a critical ill-posed problem that is important in many vision-based robotics applications. The recently proposed event-based double integral (EDI) provides a theoretical framework for solving the deblurring problem with the event camera and generating clear images at high frame-rate. However, the original EDI is mainly designed for offline computation and does not support real-time requirement in many robotics applications. In this paper, we propose the fast EDI, an efficient implementation of EDI that can achieve real-time online computation on single-core CPU devices, which is common for physical robotic platforms used in practice. In experiments, our method can handle event rates at as high as 13 million event per second in a wide variety of challenging lighting conditions. We demonstrate the benefit on multiple downstream real-time applications, including localization, visual tag detection, and feature matching.
TJ-FlyingFish: Design and Implementation of an Aerial-Aquatic Quadrotor with Tiltable Propulsion Units
Feb 07, 2023



Aerial-aquatic vehicles are capable to move in the two most dominant fluids, making them more promising for a wide range of applications. We propose a prototype with special designs for propulsion and thruster configuration to cope with the vast differences in the fluid properties of water and air. For propulsion, the operating range is switched for the different mediums by the dual-speed propulsion unit, providing sufficient thrust and also ensuring output efficiency. For thruster configuration, thrust vectoring is realized by the rotation of the propulsion unit around the mount arm, thus enhancing the underwater maneuverability. This paper presents a quadrotor prototype of this concept and the design details and realization in practice.