 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Event-based Double Integral for Real-time Robotics
May 10, 2023Motion deblurring is a critical ill-posed problem that is important in many vision-based robotics applications. The recently proposed event-based double integral (EDI) provides a theoretical framework for solving the deblurring problem with the event camera and generating clear images at high frame-rate. However, the original EDI is mainly designed for offline computation and does not support real-time requirement in many robotics applications. In this paper, we propose the fast EDI, an efficient implementation of EDI that can achieve real-time online computation on single-core CPU devices, which is common for physical robotic platforms used in practice. In experiments, our method can handle event rates at as high as 13 million event per second in a wide variety of challenging lighting conditions. We demonstrate the benefit on multiple downstream real-time applications, including localization, visual tag detection, and feature matching.
Temporally and Spatially variant-resolution illumination patterns in computational ghost imaging
May 14, 2022



Conventional computational ghost imaging (CGI) uses light carrying a sequence of patterns with uniform-resolution to illuminate the object, then performs correlation calculation based on the light intensity value reflected by the target and the preset patterns to obtain object image. It requires a large number of measurements to obtain high-quality images, especially if high-resolution images are to be obtained. To solve this problem, we developed temporally variable-resolution illumination patterns, replacing the conventional uniform-resolution illumination patterns with a sequence of patterns of different imaging resolutions. In addition, we propose to combine temporally variable-resolution illumination patterns and spatially variable-resolution structure to develop temporally and spatially variable-resolution (TSV) illumination patterns, which not only improve the imaging quality of the region of interest (ROI) but also improve the robustness to noise. The methods using proposed illumination patterns are verified by simulations and experiments compared with CGI. For the same number of measurements, the method using temporally variable-resolution illumination patterns has better imaging quality than CGI, but it is less robust to noise. The method using TSV illumination patterns has better imaging quality in ROI than the method using temporally variable-resolution illumination patterns and CGI under the same number of measurements. We also experimentally verify that the method using TSV patterns have better imaging performance when applied to higher resolution imaging. The proposed methods are expected to solve the current computational ghost imaging that is difficult to achieve high-resolution and high-quality imaging.
Omnidirectional ghost imaging system and unwrapping-free panoramic ghost imaging
Aug 11, 2021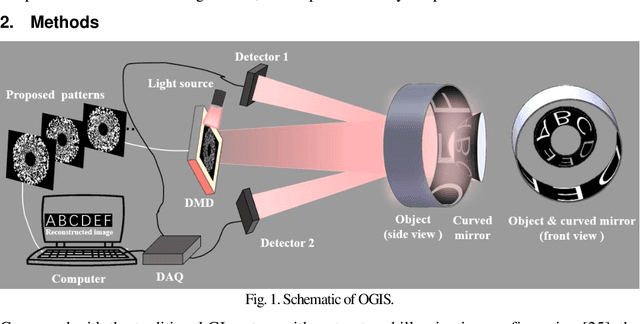
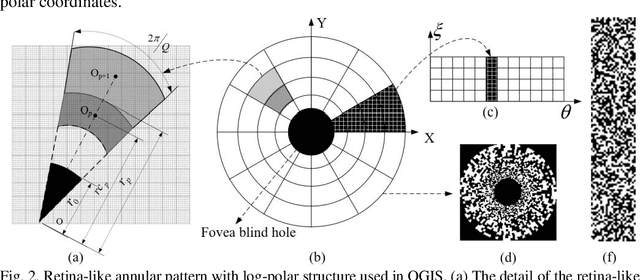
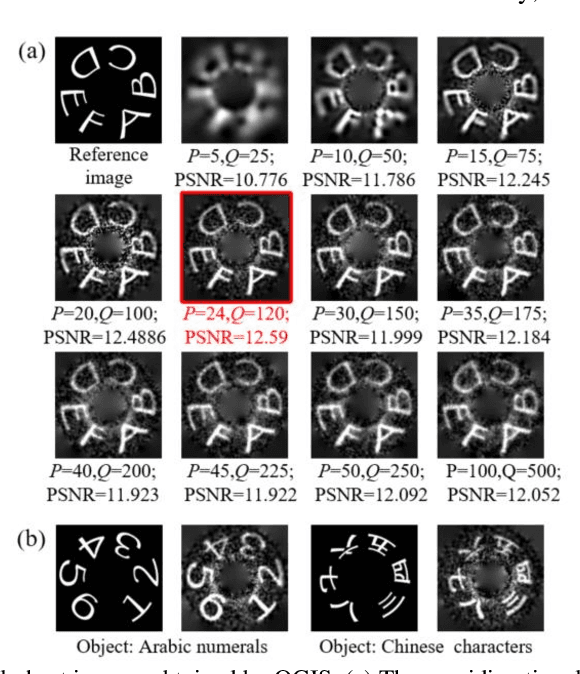
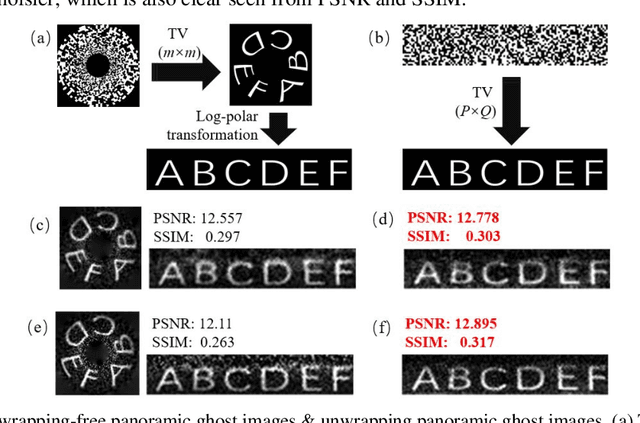
Ghost imaging (GI) is a novel imaging method, which can reconstruct the object information by the light intensity correlation measurements. However, at present, the field of view (FOV) is limited to the illuminating range of the light patterns. To enlarge FOV of GI efficiently, here we proposed the omnidirectional ghost imaging system (OGIS), which can achieve a 360{\deg} omnidirectional FOV at one shot only by adding a curved mirror. Moreover, by designing the retina-like annular patterns with log-polar patterns, OGIS can obtain unwrapping-free undistorted panoramic images with uniform resolution, which opens up a new way for the application of GI.
Graph-based Kinship Reasoning Network
Apr 22, 2020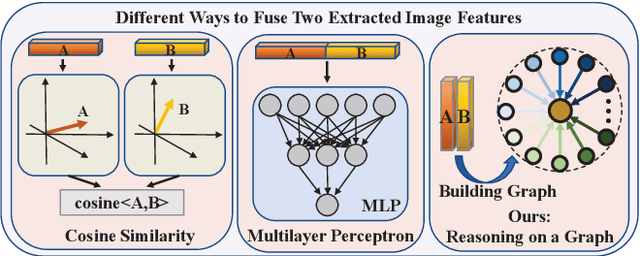
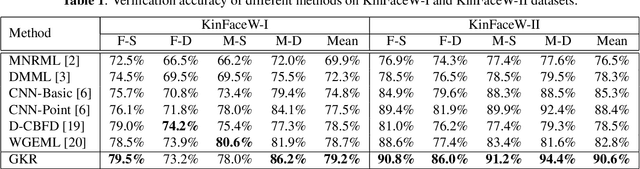
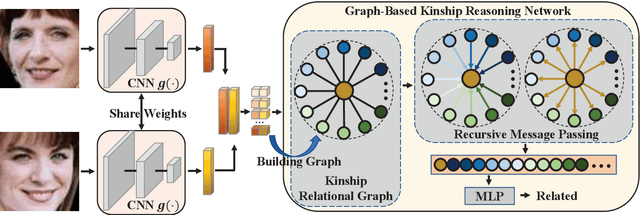
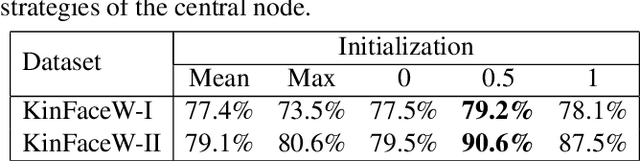
In this paper, we propose a graph-based kinship reasoning (GKR) network for kinship verification, which aims to effectively perform relational reasoning on the extracted features of an image pair. Unlike most existing methods which mainly focus on how to learn discriminative features, our method considers how to compare and fuse the extracted feature pair to reason about the kin relations. The proposed GKR constructs a star graph called kinship relational graph where each peripheral node represents the information comparison in one feature dimension and the central node is used as a bridge for information communication among peripheral nodes. Then the GKR performs relational reasoning on this graph with recursive message passing. Extensive experimental results on the KinFaceW-I and KinFaceW-II datasets show that the proposed GKR outperforms the state-of-the-art methods.