 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Learning with Strategic Selection and Forgetting for Network Intrusion Detection
Dec 20, 2024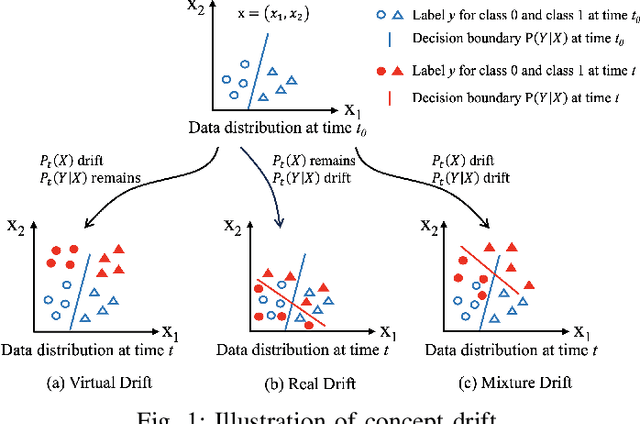
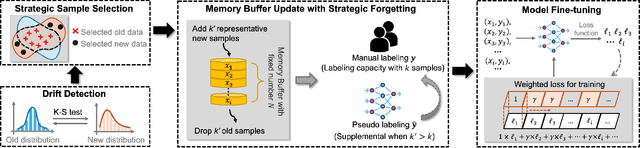
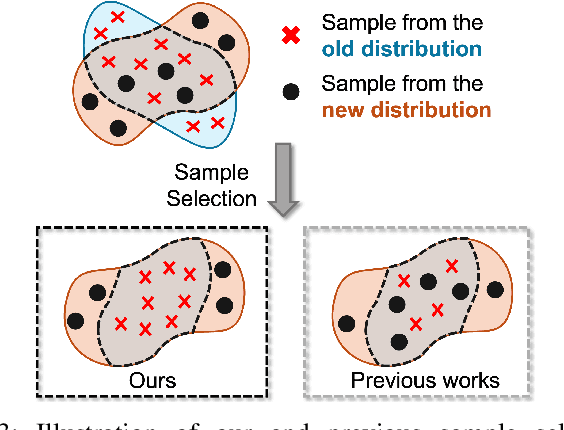
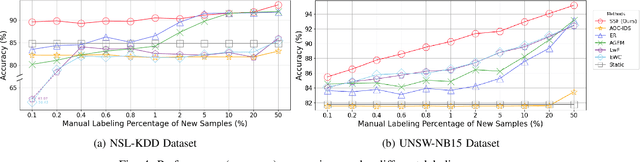
Intrusion Detection Systems (IDS) are crucial for safeguarding digital infrastructure. In dynamic network environments, both threat landscapes and normal operational behaviors are constantly changing, resulting in concept drift. While continuous learning mitigates the adverse effects of concept drift, insufficient attention to drift patterns and excessive preservation of outdated knowledge can still hinder the IDS's adaptability. In this paper, we propose SSF (Strategic Selection and Forgetting), a novel continual learning method for IDS, providing continuous model updates with a constantly refreshed memory buffer. Our approach features a strategic sample selection algorithm to select representative new samples and a strategic forgetting mechanism to drop outdated samples. The proposed strategic sample selection algorithm prioritizes new samples that cause the `drifted' pattern, enabling the model to better understand the evolving landscape. Additionally, we introduce strategic forgetting upon detecting significant drift by discarding outdated samples to free up memory, allowing the incorporation of more recent data. SSF captures evolving patterns effectively and ensures the model is aligned with the change of data patterns, significantly enhancing the IDS's adaptability to concept drift. The state-of-the-art performance of SSF on NSL-KDD and UNSW-NB15 datasets demonstrates its superior adaptability to concept drift for network intrusion detection.
SEMDR: A Semantic-Aware Dual Encoder Model for Legal Judgment Prediction with Legal Clue Tracing
Aug 19, 2024



Legal Judgment Prediction (LJP) aims to form legal judgments based on the criminal fact description. However, researchers struggle to classify confusing criminal cases, such as robbery and theft, which requires LJP models to distinguish the nuances between similar crimes. Existing methods usually design handcrafted features to pick up necessary semantic legal clues to make more accurate legal judgment predictions. In this paper, we propose a Semantic-Aware Dual Encoder Model (SEMDR), which designs a novel legal clue tracing mechanism to conduct fine-grained semantic reasoning between criminal facts and instruments. Our legal clue tracing mechanism is built from three reasoning levels: 1) Lexicon-Tracing, which aims to extract criminal facts from criminal descriptions; 2) Sentence Representation Learning, which contrastively trains language models to better represent confusing criminal facts; 3) Multi-Fact Reasoning, which builds a reasons graph to propagate semantic clues among fact nodes to capture the subtle difference among criminal facts. Our legal clue tracing mechanism helps SEMDR achieve state-of-the-art on the CAIL2018 dataset and shows its advance in few-shot scenarios. Our experiments show that SEMDR has a strong ability to learn more uniform and distinguished representations for criminal facts, which helps to make more accurate predictions on confusing criminal cases and reduces the model uncertainty during making judgments. All codes will be released via GitHub.
OA-ECBVC: A Cooperative Collision-free Encirclement and Capture Approach in Cluttered Environments
Dec 03, 2023This article investigates the practical scenarios of chasing an adversarial evader in an unbounded environment with cluttered obstacles. We propose a Voronoi-based decentralized algorithm for multiple pursuers to encircle and capture the evader by reacting to collisions. An efficient approach is presented for constructing an obstacle-aware evader-centered bounded Voronoi cell (OA-ECBVC), which strictly ensures collision avoidance in various obstacle scenarios when pursuing the evader. The evader can be efficiently enclosed in a convex hull given random initial configurations. Furthermore, to cooperatively capture the evader, each pursuer continually compresses the boundary of its OA-ECBVC to quickly reduce the movement space of the evader while maintaining encirclement. Our OA-ECBVC algorithm is validated in various simulated environments with different dynamic systems of robots. Real-time performance of resisting uncertainties shows the superior reliability of our method for deployment on multiple robot platforms.
On the Dilution of Precision for Time Difference of Arrival with Station Deployment
Dec 10, 2021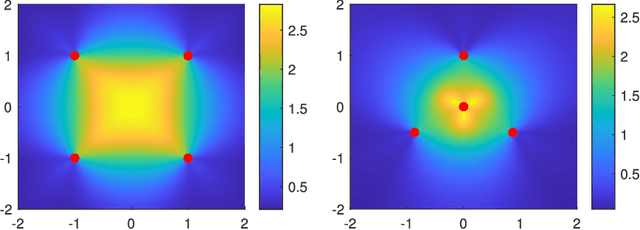
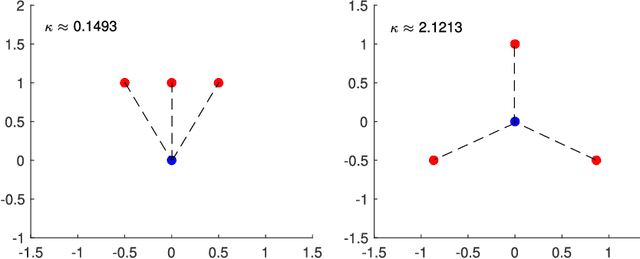

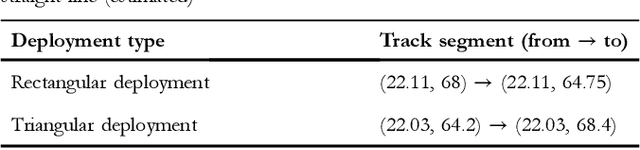
The paper aims to reveal the relationship between the performance of moving object tracking algorithms and the tracking anchors (station) deployment. The Dilution of Precision (DoP) for Time difference of arrival (TDoA) technique with respect to anchor deployment is studied. Linear estimator and non-linear estimator are used for TDoA algorithms. The research findings are: for the linear estimator, the DoP attain a lower value when other anchors are scattered around a central anchor; for the nonlinear estimator, the DoP is optimal when the anchors are scattered around the target tag. Experiments on both of the algorithms are conducted, targeting the location precision related to the anchors' deployment, with practical situations for tracking moving objects integrated with a Kalman Filter (KF) in an Ultra-Wide Band (UWB) based real-time localization system. The work provides a guideline for deploying anchors in UWB-based tracking systems.