 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Dilution of Precision for Time Difference of Arrival with Station Deployment
Paper and Code
Dec 10, 2021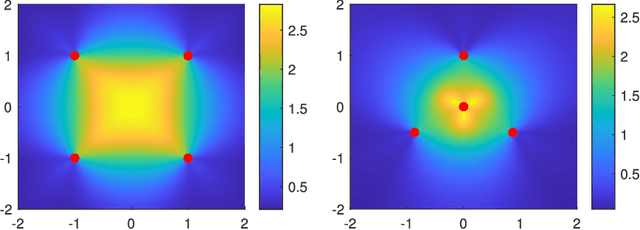
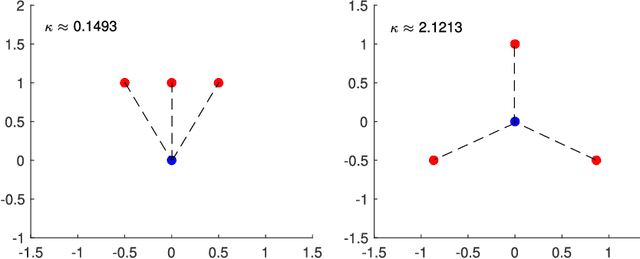

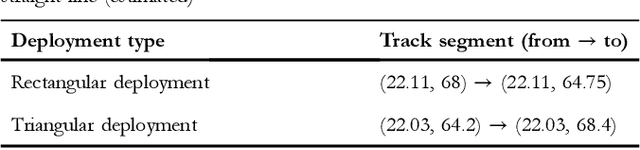
The paper aims to reveal the relationship between the performance of moving object tracking algorithms and the tracking anchors (station) deployment. The Dilution of Precision (DoP) for Time difference of arrival (TDoA) technique with respect to anchor deployment is studied. Linear estimator and non-linear estimator are used for TDoA algorithms. The research findings are: for the linear estimator, the DoP attain a lower value when other anchors are scattered around a central anchor; for the nonlinear estimator, the DoP is optimal when the anchors are scattered around the target tag. Experiments on both of the algorithms are conducted, targeting the location precision related to the anchors' deployment, with practical situations for tracking moving objects integrated with a Kalman Filter (KF) in an Ultra-Wide Band (UWB) based real-time localization system. The work provides a guideline for deploying anchors in UWB-based tracking systems.