 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLIM-VDB: A Real-Time 3D Probabilistic Semantic Mapping Framework
Dec 15, 2025This paper introduces SLIM-VDB, a new lightweight semantic mapping system with probabilistic semantic fusion for closed-set or open-set dictionaries. Advances in data structures from the computer graphics community, such as OpenVDB, have demonstrated significantly improved computational and memory efficiency in volumetric scene representation. Although OpenVDB has been used for geometric mapping in robotics applications, semantic mapping for scene understanding with OpenVDB remains unexplored. In addition, existing semantic mapping systems lack support for integrating both fixed-category and open-language label predictions within a single framework. In this paper, we propose a novel 3D semantic mapping system that leverages the OpenVDB data structure and integrates a unified Bayesian update framework for both closed- and open-set semantic fusion. Our proposed framework, SLIM-VDB, achieves significant reduction in both memory and integration times compared to current state-of-the-art semantic mapping approaches, while maintaining comparable mapping accuracy. An open-source C++ codebase with a Python interface is available at https://github.com/umfieldrobotics/slim-vdb.
MatPredict: a dataset and benchmark for learning material properties of diverse indoor objects
May 19, 2025



Determining material properties from camera images can expand the ability to identify complex objects in indoor environments, which is valuable for consumer robotics applications. To support this, we introduce MatPredict, a dataset that combines the high-quality synthetic objects from Replica dataset with MatSynth dataset's material properties classes - to create objects with diverse material properties. We select 3D meshes of specific foreground objects and render them with different material properties. In total, we generate \textbf{18} commonly occurring objects with \textbf{14} different materials. We showcase how we provide variability in terms of lighting and camera placement for these objects. Next, we provide a benchmark for inferring material properties from visual images using these perturbed models in the scene, discussing the specific neural network models involved and their performance based on different image comparison metrics. By accurately simulating light interactions with different materials, we can enhance realism, which is crucial for training models effectively through large-scale simulations. This research aims to revolutionize perception in consumer robotics. The dataset is provided \href{https://huggingface.co/datasets/UMTRI/MatPredict}{here} and the code is provided \href{https://github.com/arpan-kusari/MatPredict}{here}.
DEFT: Differentiable Branched Discrete Elastic Rods for Modeling Furcated DLOs in Real-Time
Feb 20, 2025



Autonomous wire harness assembly requires robots to manipulate complex branched cables with high precision and reliability. A key challenge in automating this process is predicting how these flexible and branched structures behave under manipulation. Without accurate predictions, it is difficult for robots to reliably plan or execute assembly operations. While existing research has made progress in modeling single-threaded Deformable Linear Objects (DLOs), extending these approaches to Branched Deformable Linear Objects (BDLOs) presents fundamental challenges. The junction points in BDLOs create complex force interactions and strain propagation patterns that cannot be adequately captured by simply connecting multiple single-DLO models. To address these challenges, this paper presents Differentiable discrete branched Elastic rods for modeling Furcated DLOs in real-Time (DEFT), a novel framework that combines a differentiable physics-based model with a learning framework to: 1) accurately model BDLO dynamics, including dynamic propagation at junction points and grasping in the middle of a BDLO, 2) achieve efficient computation for real-time inference, and 3) enable planning to demonstrate dexterous BDLO manipulation. A comprehensive series of real-world experiments demonstrates DEFT's efficacy in terms of accuracy, computational speed, and generalizability compared to state-of-the-art alternatives. Project page:https://roahmlab.github.io/DEFT/.
Differentiable Discrete Elastic Rods for Real-Time Modeling of Deformable Linear Objects
Jun 09, 2024This paper addresses the task of modeling Deformable Linear Objects (DLOs), such as ropes and cables, during dynamic motion over long time horizons. This task presents significant challenges due to the complex dynamics of DLOs. To address these challenges, this paper proposes differentiable Discrete Elastic Rods For deformable linear Objects with Real-time Modeling (DEFORM), a novel framework that combines a differentiable physics-based model with a learning framework to model DLOs accurately and in real-time. The performance of DEFORM is evaluated in an experimental setup involving two industrial robots and a variety of sensors. A comprehensive series of experiments demonstrate the efficacy of DEFORM in terms of accuracy, computational speed, and generalizability when compared to state-of-the-art alternatives. To further demonstrate the utility of DEFORM, this paper integrates it into a perception pipeline and illustrates its superior performance when compared to the state-of-the-art methods while tracking a DLO even in the presence of occlusions. Finally, this paper illustrates the superior performance of DEFORM when compared to state-of-the-art methods when it is applied to perform autonomous planning and control of DLOs.
You've Got to Feel It To Believe It: Multi-Modal Bayesian Inference for Semantic and Property Prediction
Feb 15, 2024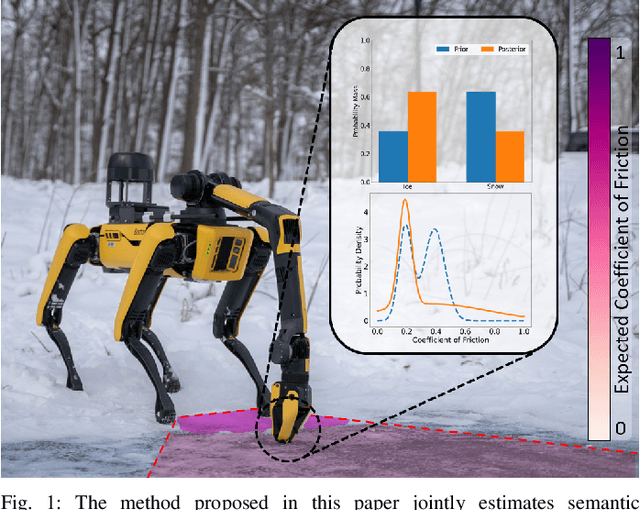
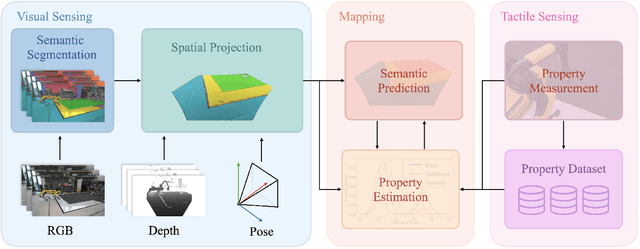
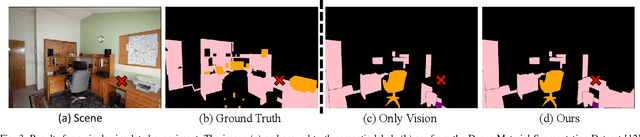
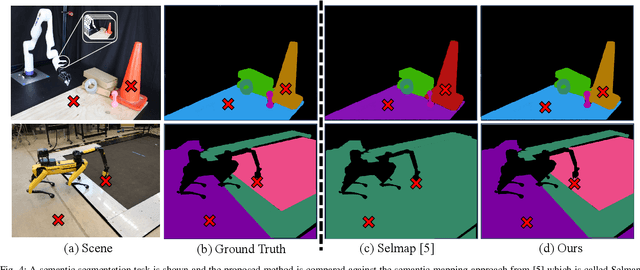
Robots must be able to understand their surroundings to perform complex tasks in challenging environments and many of these complex tasks require estimates of physical properties such as friction or weight. Estimating such properties using learning is challenging due to the large amounts of labelled data required for training and the difficulty of updating these learned models online at run time. To overcome these challenges, this paper introduces a novel, multi-modal approach for representing semantic predictions and physical property estimates jointly in a probabilistic manner. By using conjugate pairs, the proposed method enables closed-form Bayesian updates given visual and tactile measurements without requiring additional training data. The efficacy of the proposed algorithm is demonstrated through several hardware experiments. In particular, this paper illustrates that by conditioning semantic classifications on physical properties, the proposed method quantitatively outperforms state-of-the-art semantic classification methods that rely on vision alone. To further illustrate its utility, the proposed method is used in several applications including to represent affordance-based properties probabilistically and a challenging terrain traversal task using a legged robot. In the latter task, the proposed method represents the coefficient of friction of the terrain probabilistically, which enables the use of an on-line risk-aware planner that switches the legged robot from a dynamic gait to a static, stable gait when the expected value of the coefficient of friction falls below a given threshold. Videos of these case studies as well as the open-source C++ and ROS interface can be found at https://roahmlab.github.io/multimodal_mapping/.
Comprehensive and Clinically Accurate Head and Neck Organs at Risk Delineation via Stratified Deep Learning: A Large-scale Multi-Institutional Study
Nov 01, 2021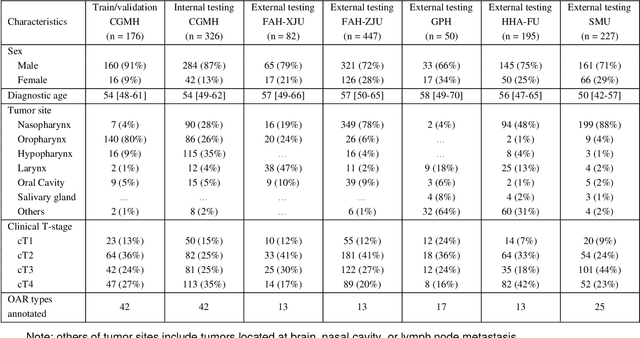
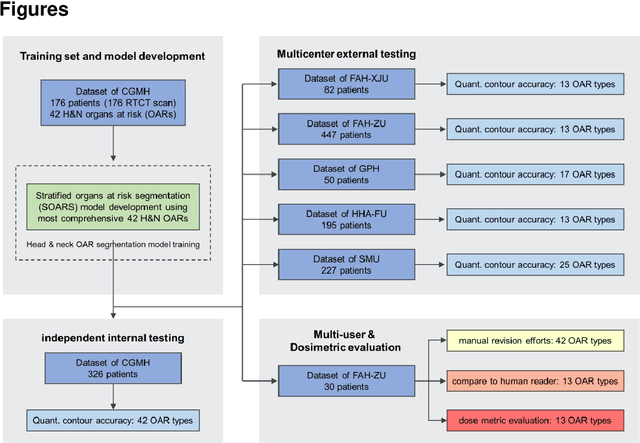
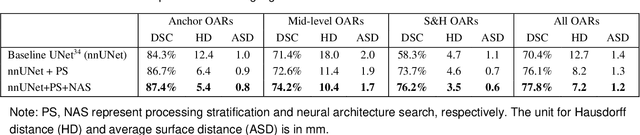
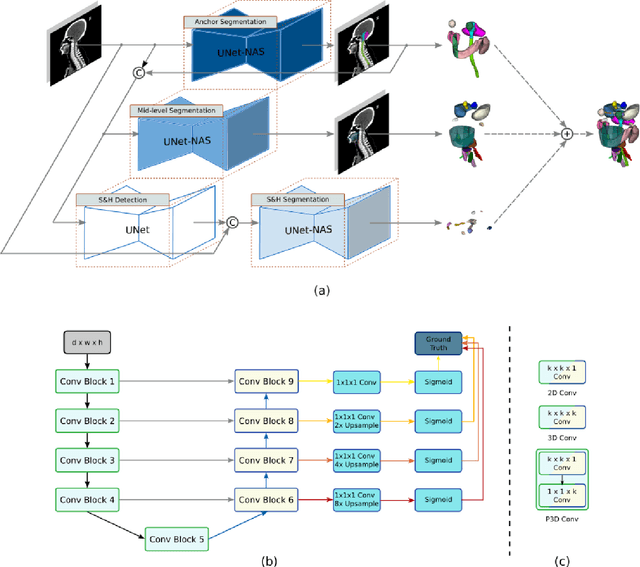
Accurate organ at risk (OAR) segmentation is critical to reduce the radiotherapy post-treatment complications. Consensus guidelines recommend a set of more than 40 OARs in the head and neck (H&N) region, however, due to the predictable prohibitive labor-cost of this task, most institutions choose a substantially simplified protocol by delineating a smaller subset of OARs and neglecting the dose distributions associated with other OARs. In this work we propose a novel, automated and highly effective stratified OAR segmentation (SOARS) system using deep learning to precisely delineate a comprehensive set of 42 H&N OARs. SOARS stratifies 42 OARs into anchor, mid-level, and small & hard subcategories, with specifically derived neural network architectures for each category by neural architecture search (NAS) principles. We built SOARS models using 176 training patients in an internal institution and independently evaluated on 1327 external patients across six different institutions. It consistently outperformed other state-of-the-art methods by at least 3-5% in Dice score for each institutional evaluation (up to 36% relative error reduction in other metrics). More importantly, extensive multi-user studies evidently demonstrated that 98% of the SOARS predictions need only very minor or no revisions for direct clinical acceptance (saving 90% radiation oncologists workload), and their segmentation and dosimetric accuracy are within or smaller than the inter-user variation. These findings confirmed the strong clinical applicability of SOARS for the OAR delineation process in H&N cancer radiotherapy workflows, with improved efficiency, comprehensiveness, and quality.
Multi-institutional Validation of Two-Streamed Deep Learning Method for Automated Delineation of Esophageal Gross Tumor Volume using planning-CT and FDG-PETCT
Oct 11, 2021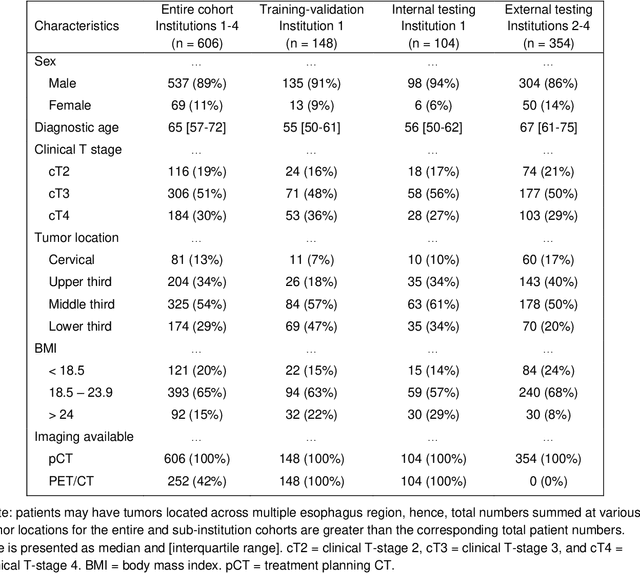
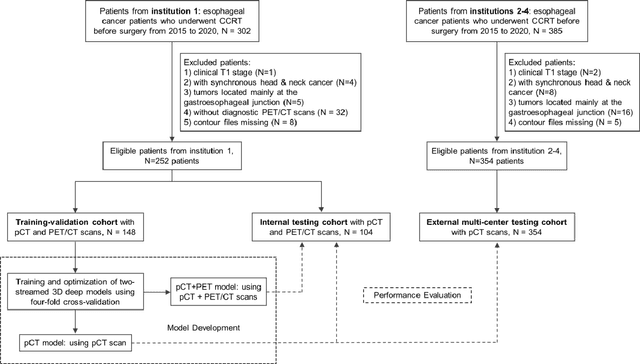
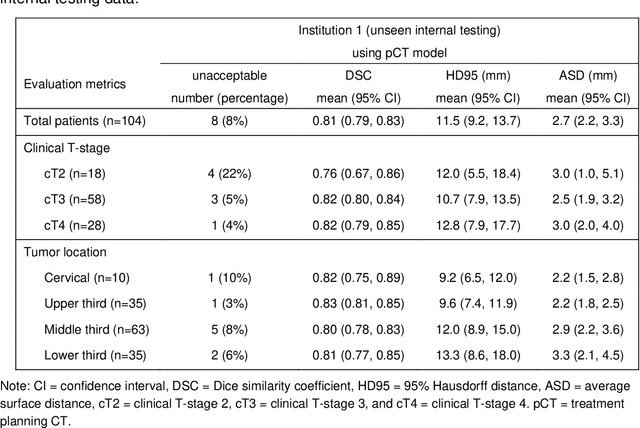
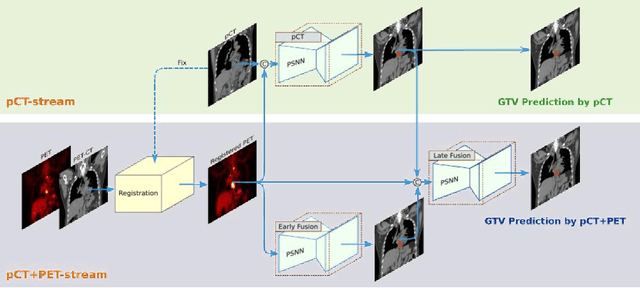
Background: The current clinical workflow for esophageal gross tumor volume (GTV) contouring relies on manual delineation of high labor-costs and interuser variability. Purpose: To validate the clinical applicability of a deep learning (DL) multi-modality esophageal GTV contouring model, developed at 1 institution whereas tested at multiple ones. Methods and Materials: We collected 606 esophageal cancer patients from four institutions. 252 institution-1 patients had a treatment planning-CT (pCT) and a pair of diagnostic FDG-PETCT; 354 patients from other 3 institutions had only pCT. A two-streamed DL model for GTV segmentation was developed using pCT and PETCT scans of a 148 patient institution-1 subset. This built model had the flexibility of segmenting GTVs via only pCT or pCT+PETCT combined. For independent evaluation, the rest 104 institution-1 patients behaved as unseen internal testing, and 354 institutions 2-4 patients were used for external testing. We evaluated manual revision degrees by human experts to assess the contour-editing effort. The performance of the deep model was compared against 4 radiation oncologists in a multiuser study with 20 random external patients. Contouring accuracy and time were recorded for the pre-and post-DL assisted delineation process. Results: Our model achieved high segmentation accuracy in internal testing (mean Dice score: 0.81 using pCT and 0.83 using pCT+PET) and generalized well to external evaluation (mean DSC: 0.80). Expert assessment showed that the predicted contours of 88% patients need only minor or no revision. In multi-user evaluation, with the assistance of a deep model, inter-observer variation and required contouring time were reduced by 37.6% and 48.0%, respectively. Conclusions: Deep learning predicted GTV contours were in close agreement with the ground truth and could be adopted clinically with mostly minor or no changes.
Angel's Girl for Blind Painters: an Efficient Painting Navigation System Validated by Multimodal Evaluation Approach
Jul 27, 2021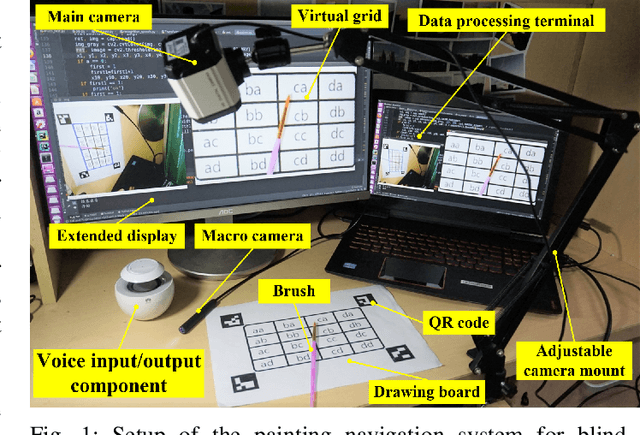
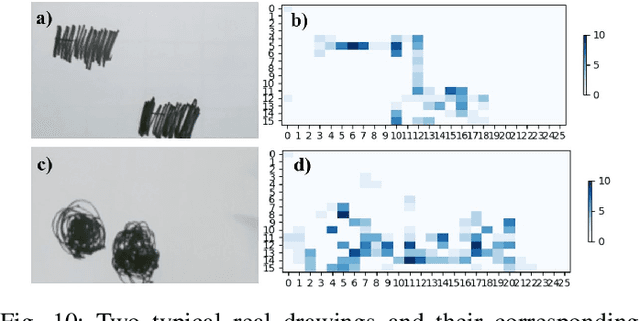
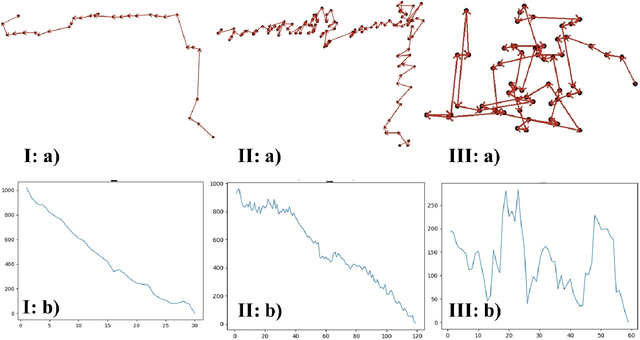
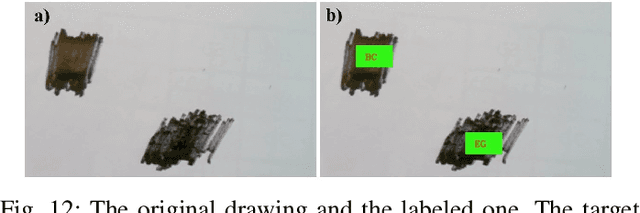
For people who ardently love painting but unfortunately have visual impairments, holding a paintbrush to create a work is a very difficult task. People in this special group are eager to pick up the paintbrush, like Leonardo da Vinci, to create and make full use of their own talents. Therefore, to maximally bridge this gap, we propose a painting navigation system to assist blind people in painting and artistic creation. The proposed system is composed of cognitive system and guidance system. The system adopts drawing board positioning based on QR code, brush navigation based on target detection and bush real-time positioning. Meanwhile, this paper uses human-computer interaction on the basis of voice and a simple but efficient position information coding rule. In addition, we design a criterion to efficiently judge whether the brush reaches the target or not. According to the experimental results, the thermal curves extracted from the faces of testers show that it is relatively well accepted by blindfolded and even blind testers. With the prompt frequency of 1s, the painting navigation system performs best with the completion degree of 89% with SD of 8.37% and overflow degree of 347% with SD of 162.14%. Meanwhile, the excellent and good types of brush tip trajectory account for 74%, and the relative movement distance is 4.21 with SD of 2.51. This work demonstrates that it is practicable for the blind people to feel the world through the brush in their hands. In the future, we plan to deploy Angle's Eyes on the phone to make it more portable. The demo video of the proposed painting navigation system is available at: https://doi.org/10.6084/m9.figshare.9760004.v1.
Face Mask Assistant: Detection of Face Mask Service Stage Based on Mobile Phone
Oct 09, 2020
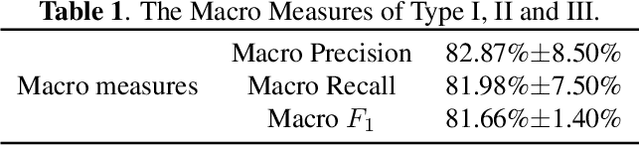
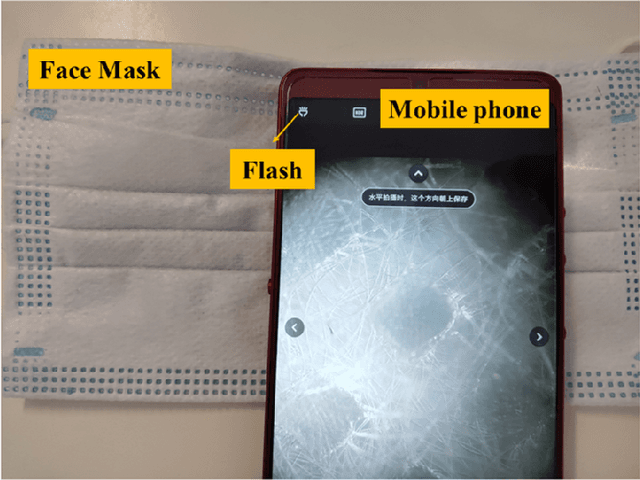
Coronavirus Disease 2019 (COVID-19) has spread all over the world since it broke out massively in December 2019, which has caused a large loss to the whole world. Both the confirmed cases and death cases have reached a relatively frightening number. Syndrome coronaviruses 2 (SARS-CoV-2), the cause of COVID-19, can be transmitted by small respiratory droplets. To curb its spread at the source, wearing masks is a convenient and effective measure. In most cases, people use face masks in a high-frequent but short-time way. Aimed at solving the problem that we don't know which service stage of the mask belongs to, we propose a detection system based on the mobile phone. We first extract four features from the GLCMs of the face mask's micro-photos. Next, a three-result detection system is accomplished by using KNN algorithm. The results of validation experiments show that our system can reach a precision of 82.87% (standard deviation=8.5%) on the testing dataset. In future work, we plan to expand the detection objects to more mask types. This work demonstrates that the proposed mobile microscope system can be used as an assistant for face mask being used, which may play a positive role in fighting against COVID-19.