 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Robust Learning based Formation Control of Mobile Robots based on Bioinspired Neural Dynamics
Mar 23, 2024



This paper addresses the challenges of distributed formation control in multiple mobile robots, introducing a novel approach that enhances real-world practicability. We first introduce a distributed estimator using a variable structure and cascaded design technique, eliminating the need for derivative information to improve the real time performance. Then, a kinematic tracking control method is developed utilizing a bioinspired neural dynamic-based approach aimed at providing smooth control inputs and effectively resolving the speed jump issue. Furthermore, to address the challenges for robots operating with completely unknown dynamics and disturbances, a learning-based robust dynamic controller is developed. This controller provides real time parameter estimates while maintaining its robustness against disturbances. The overall stability of the proposed method is proved with rigorous mathematical analysis. At last, multiple comprehensive simulation studies have shown the advantages and effectiveness of the proposed method.
A Novel Feature Learning-based Bio-inspired Neural Network for Real-time Collision-free Rescue of Multi-Robot Systems
Mar 13, 2024Natural disasters and urban accidents drive the demand for rescue robots to provide safer, faster, and more efficient rescue trajectories. In this paper, a feature learning-based bio-inspired neural network (FLBBINN) is proposed to quickly generate a heuristic rescue path in complex and dynamic environments, as traditional approaches usually cannot provide a satisfactory solution to real-time responses to sudden environmental changes. The neurodynamic model is incorporated into the feature learning method that can use environmental information to improve path planning strategies. Task assignment and collision-free rescue trajectory are generated through robot poses and the dynamic landscape of neural activity. A dual-channel scale filter, a neural activity channel, and a secondary distance fusion are employed to extract and filter feature neurons. After completion of the feature learning process, a neurodynamics-based feature matrix is established to quickly generate the new heuristic rescue paths with parameter-driven topological adaptability. The proposed FLBBINN aims to reduce the computational complexity of the neural network-based approach and enable the feature learning method to achieve real-time responses to environmental changes. Several simulations and experiments have been conducted to evaluate the performance of the proposed FLBBINN. The results show that the proposed FLBBINN would significantly improve the speed, efficiency, and optimality for rescue operations.
Intelligent Collective Escape of Swarm Robots Based on a Novel Fish-inspired Self-adaptive Approach with Neurodynamic Models
Feb 06, 2024



Fish schools present high-efficiency group behaviors through simple individual interactions to collective migration and dynamic escape from the predator. The school behavior of fish is usually a good inspiration to design control architecture for swarm robots. In this paper, a novel fish-inspired self-adaptive approach is proposed for collective escape for the swarm robots. In addition, a bio-inspired neural network (BINN) is introduced to generate collision-free escape robot trajectories through the combination of attractive and repulsive forces. Furthermore, to cope with dynamic environments, a neurodynamics-based self-adaptive mechanism is proposed to improve the self-adaptive performance of the swarm robots in the changing environment. Similar to fish escape maneuvers, simulation and experimental results show that the swarm robots are capable of collectively leaving away from the threats. Several comparison studies demonstrated that the proposed approach can significantly improve the effectiveness and efficiency of system performance, and the flexibility and robustness in complex environments.
Current Effect-eliminated Optimal Target Assignment and Motion Planning for a Multi-UUV System
Jan 10, 2024



The paper presents an innovative approach (CBNNTAP) that addresses the complexities and challenges introduced by ocean currents when optimizing target assignment and motion planning for a multi-unmanned underwater vehicle (UUV) system. The core of the proposed algorithm involves the integration of several key components. Firstly, it incorporates a bio-inspired neural network-based (BINN) approach which predicts the most efficient paths for individual UUVs while simultaneously ensuring collision avoidance among the vehicles. Secondly, an efficient target assignment component is integrated by considering the path distances determined by the BINN algorithm. In addition, a critical innovation within the CBNNTAP algorithm is its capacity to address the disruptive effects of ocean currents, where an adjustment component is seamlessly integrated to counteract the deviations caused by these currents, which enhances the accuracy of both motion planning and target assignment for the UUVs. The effectiveness of the CBNNTAP algorithm is demonstrated through comprehensive simulation results and the outcomes underscore the superiority of the developed algorithm in nullifying the effects of static and dynamic ocean currents in 2D and 3D scenarios.
Intelligent Escape of Robotic Systems: A Survey of Methodologies, Applications, and Challenges
Oct 23, 2023Intelligent escape is an interdisciplinary field that employs artificial intelligence (AI) techniques to enable robots with the capacity to intelligently react to potential dangers in dynamic, intricate, and unpredictable scenarios. As the emphasis on safety becomes increasingly paramount and advancements in robotic technologies continue to advance, a wide range of intelligent escape methodologies has been developed in recent years. This paper presents a comprehensive survey of state-of-the-art research work on intelligent escape of robotic systems. Four main methods of intelligent escape are reviewed, including planning-based methodologies, partitioning-based methodologies, learning-based methodologies, and bio-inspired methodologies. The strengths and limitations of existing methods are summarized. In addition, potential applications of intelligent escape are discussed in various domains, such as search and rescue, evacuation, military security, and healthcare. In an effort to develop new approaches to intelligent escape, this survey identifies current research challenges and provides insights into future research trends in intelligent escape.
Distributed Neurodynamics-Based Backstepping Optimal Control for Robust Constrained Consensus of Underactuated Underwater Vehicles Fleet
Aug 18, 2023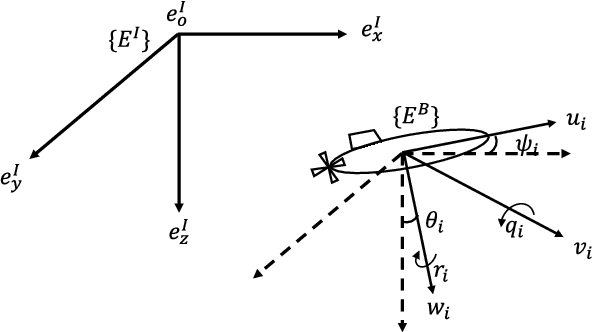
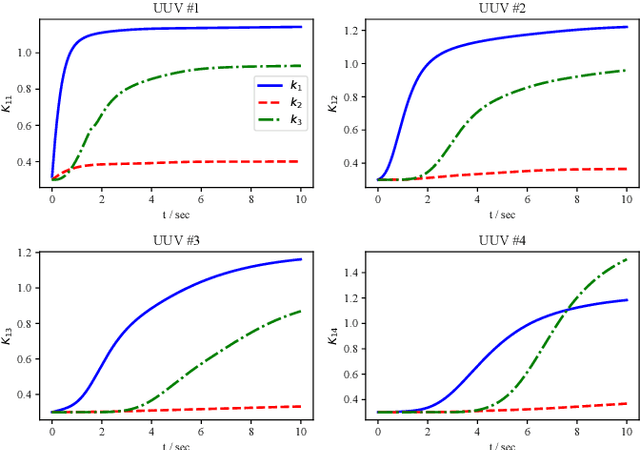
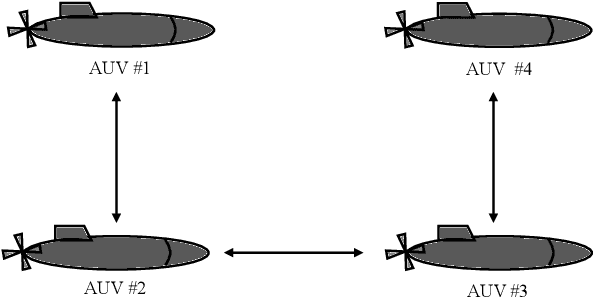
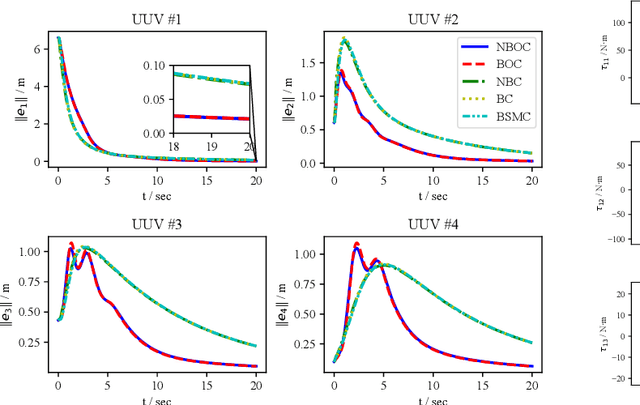
Robust constrained formation tracking control of underactuated underwater vehicles (UUVs) fleet in three-dimensional space is a challenging but practical problem. To address this problem, this paper develops a novel consensus based optimal coordination protocol and a robust controller, which adopts a hierarchical architecture. On the top layer, the spherical coordinate transform is introduced to tackle the nonholonomic constraint, and then a distributed optimal motion coordination strategy is developed. As a result, the optimal formation tracking of UUVs fleet can be achieved, and the constraints are fulfilled. To realize the generated optimal commands better and, meanwhile, deal with the underactuation, at the lower-level control loop a neurodynamics based robust backstepping controller is designed, and in particular, the issue of "explosion of terms" appearing in conventional backstepping based controllers is avoided and control activities are improved. The stability of the overall UUVs formation system is established to ensure that all the states of the UUVs are uniformly ultimately bounded in the presence of unknown disturbances. Finally, extensive simulation comparisons are made to illustrate the superiority and effectiveness of the derived optimal formation tracking protocol.
Distributed Robust Learning-Based Backstepping Control Aided with Neurodynamics for Consensus Formation Tracking of Underwater Vessels
Aug 18, 2023This paper addresses distributed robust learning-based control for consensus formation tracking of multiple underwater vessels, in which the system parameters of the marine vessels are assumed to be entirely unknown and subject to the modeling mismatch, oceanic disturbances, and noises. Towards this end, graph theory is used to allow us to synthesize the distributed controller with a stability guarantee. Due to the fact that the parameter uncertainties only arise in the vessels' dynamic model, the backstepping control technique is then employed. Subsequently, to overcome the difficulties in handling time-varying and unknown systems, an online learning procedure is developed in the proposed distributed formation control protocol. Moreover, modeling errors, environmental disturbances, and measurement noises are considered and tackled by introducing a neurodynamics model in the controller design to obtain a robust solution. Then, the stability analysis of the overall closed-loop system under the proposed scheme is provided to ensure the robust adaptive performance at the theoretical level. Finally, extensive simulation experiments are conducted to further verify the efficacy of the presented distributed control protocol.
Nowhere to Go: Benchmarking Multi-robot Collaboration in Target Trapping Environment
Aug 17, 2023Collaboration is one of the most important factors in multi-robot systems. Considering certain real-world applications and to further promote its development, we propose a new benchmark to evaluate multi-robot collaboration in Target Trapping Environment (T2E). In T2E, two kinds of robots (called captor robot and target robot) share the same space. The captors aim to catch the target collaboratively, while the target will try to escape from the trap. Both the trapping and escaping process can use the environment layout to help achieve the corresponding objective, which requires high collaboration between robots and the utilization of the environment. For the benchmark, we present and evaluate multiple learning-based baselines in T2E, and provide insights into regimes of multi-robot collaboration. We also make our benchmark publicly available and encourage researchers from related robotics disciplines to propose, evaluate, and compare their solutions in this benchmark. Our project is released at https://github.com/Dr-Xiaogaren/T2E.
Exploiting Radio Fingerprints for Simultaneous Localization and Mapping
May 23, 2023Simultaneous localization and mapping (SLAM) is paramount for unmanned systems to achieve self-localization and navigation. It is challenging to perform SLAM in large environments, due to sensor limitations, complexity of the environment, and computational resources. We propose a novel approach for localization and mapping of autonomous vehicles using radio fingerprints, for example WiFi (Wireless Fidelity) or LTE (Long Term Evolution) radio features, which are widely available in the existing infrastructure. In particular, we present two solutions to exploit the radio fingerprints for SLAM. In the first solution-namely Radio SLAM, the output is a radio fingerprint map generated using SLAM technique. In the second solution-namely Radio+LiDAR SLAM, we use radio fingerprint to assist conventional LiDAR-based SLAM to improve accuracy and speed, while generating the occupancy map. We demonstrate the effectiveness of our system in three different environments, namely outdoor, indoor building, and semi-indoor environment.
Distributed Leader Follower Formation Control of Mobile Robots based on Bioinspired Neural Dynamics and Adaptive Sliding Innovation Filter
May 03, 2023



This paper investigated the distributed leader follower formation control problem for multiple differentially driven mobile robots. A distributed estimator is first introduced and it only requires the state information from each follower itself and its neighbors. Then, we propose a bioinspired neural dynamic based backstepping and sliding mode control hybrid formation control method with proof of its stability. The proposed control strategy resolves the impractical speed jump issue that exists in the conventional backstepping design. Additionally, considering the system and measurement noises, the proposed control strategy not only removes the chattering issue existing in the conventional sliding mode control but also provides smooth control input with extra robustness. After that, an adaptive sliding innovation filter is integrated with the proposed control to provide accurate state estimates that are robust to modeling uncertainties. Finally, we performed multiple simulations to demonstrate the efficiency and effectiveness of the proposed formation control strategy.