 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Radio Fingerprints for Simultaneous Localization and Mapping
May 23, 2023Simultaneous localization and mapping (SLAM) is paramount for unmanned systems to achieve self-localization and navigation. It is challenging to perform SLAM in large environments, due to sensor limitations, complexity of the environment, and computational resources. We propose a novel approach for localization and mapping of autonomous vehicles using radio fingerprints, for example WiFi (Wireless Fidelity) or LTE (Long Term Evolution) radio features, which are widely available in the existing infrastructure. In particular, we present two solutions to exploit the radio fingerprints for SLAM. In the first solution-namely Radio SLAM, the output is a radio fingerprint map generated using SLAM technique. In the second solution-namely Radio+LiDAR SLAM, we use radio fingerprint to assist conventional LiDAR-based SLAM to improve accuracy and speed, while generating the occupancy map. We demonstrate the effectiveness of our system in three different environments, namely outdoor, indoor building, and semi-indoor environment.
Efficient WiFi LiDAR SLAM for Autonomous Robots in Large Environments
Jun 17, 2022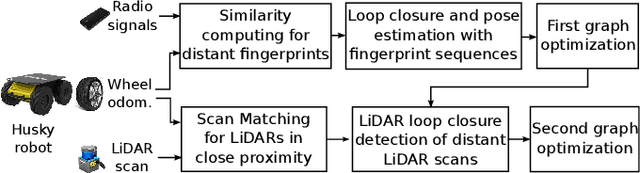
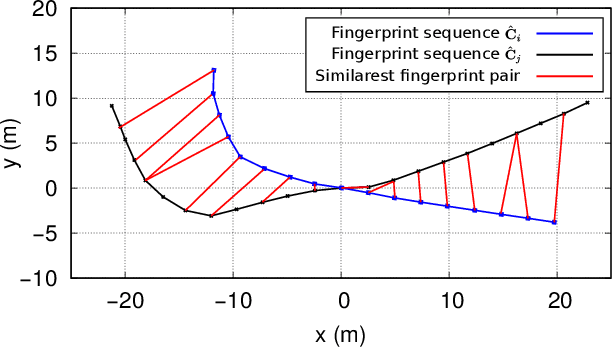
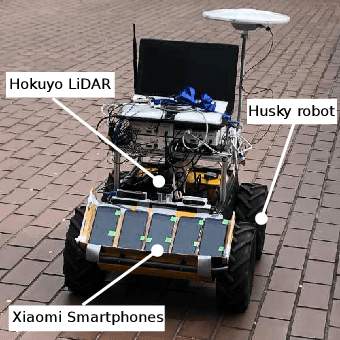
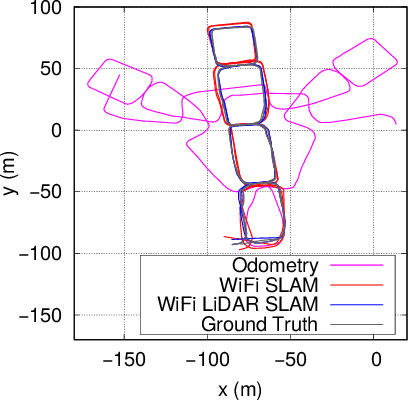
Autonomous robots operating in indoor and GPS denied environments can use LiDAR for SLAM instead. However, LiDARs do not perform well in geometrically-degraded environments, due to the challenge of loop closure detection and computational load to perform scan matching. Existing WiFi infrastructure can be exploited for localization and mapping with low hardware and computational cost. Yet, accurate pose estimation using WiFi is challenging as different signal values can be measured at the same location due to the unpredictability of signal propagation. Therefore, we introduce the use of WiFi fingerprint sequence for pose estimation (i.e. loop closure) in SLAM. This approach exploits the spatial coherence of location fingerprints obtained while a mobile robot is moving. This has better capability of correcting odometry drift. The method also incorporates LiDAR scans and thus, improving computational efficiency for large and geometrically-degraded environments while maintaining the accuracy of LiDAR SLAM. We conducted experiments in an indoor environment to illustrate the effectiveness of the method. The results are evaluated based on Root Mean Square Error (RMSE) and it has achieved an accuracy of 0.88m for the test environment.
Collaborative Radio SLAM for Multiple Robots based on WiFi Fingerprint Similarity
Oct 20, 2021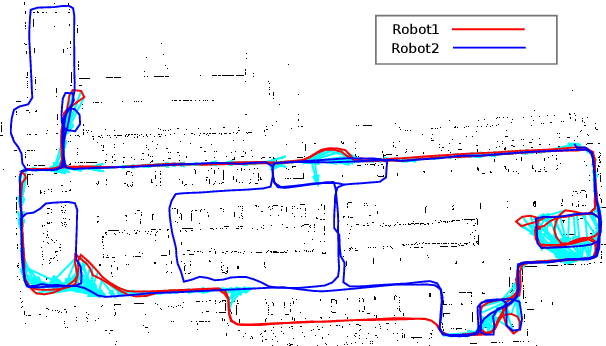
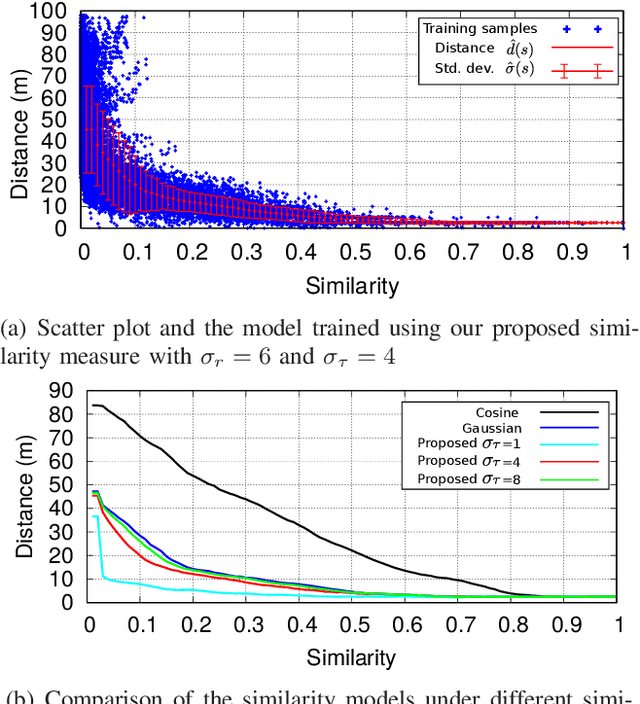

Simultaneous Localization and Mapping (SLAM) enables autonomous robots to navigate and execute their tasks through unknown environments. However, performing SLAM in large environments with a single robot is not efficient, and visual or LiDAR-based SLAM requires feature extraction and matching algorithms, which are computationally expensive. In this paper, we present a collaborative SLAM approach with multiple robots using the pervasive WiFi radio signals. A centralized solution is proposed to optimize the trajectory based on the odometry and radio fingerprints collected from multiple robots. To improve the localization accuracy, a novel similarity model is introduced that combines received signal strength (RSS) and detection likelihood of an access point (AP). We perform extensive experiments to demonstrate the effectiveness of the proposed similarity model and collaborative SLAM framework.