 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient WiFi LiDAR SLAM for Autonomous Robots in Large Environments
Jun 17, 2022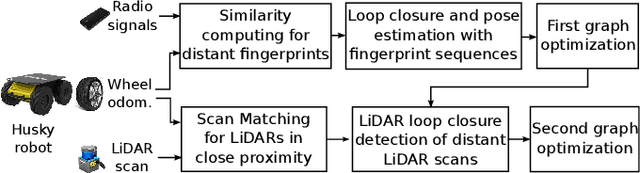
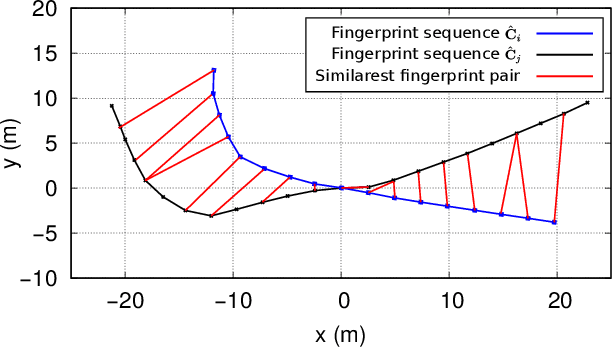
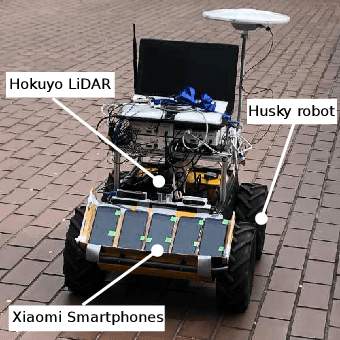
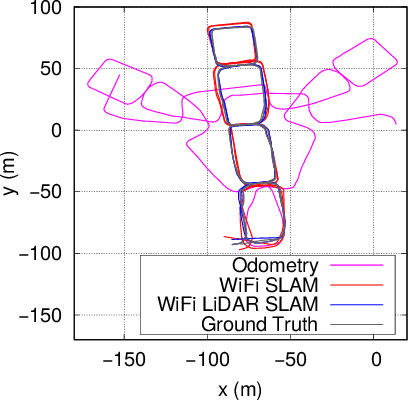
Autonomous robots operating in indoor and GPS denied environments can use LiDAR for SLAM instead. However, LiDARs do not perform well in geometrically-degraded environments, due to the challenge of loop closure detection and computational load to perform scan matching. Existing WiFi infrastructure can be exploited for localization and mapping with low hardware and computational cost. Yet, accurate pose estimation using WiFi is challenging as different signal values can be measured at the same location due to the unpredictability of signal propagation. Therefore, we introduce the use of WiFi fingerprint sequence for pose estimation (i.e. loop closure) in SLAM. This approach exploits the spatial coherence of location fingerprints obtained while a mobile robot is moving. This has better capability of correcting odometry drift. The method also incorporates LiDAR scans and thus, improving computational efficiency for large and geometrically-degraded environments while maintaining the accuracy of LiDAR SLAM. We conducted experiments in an indoor environment to illustrate the effectiveness of the method. The results are evaluated based on Root Mean Square Error (RMSE) and it has achieved an accuracy of 0.88m for the test environment.
Collaborative Radio SLAM for Multiple Robots based on WiFi Fingerprint Similarity
Oct 20, 2021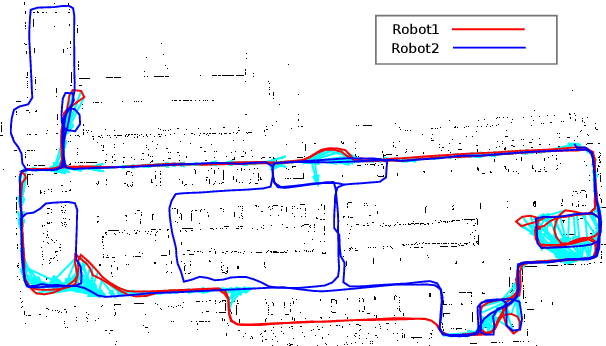
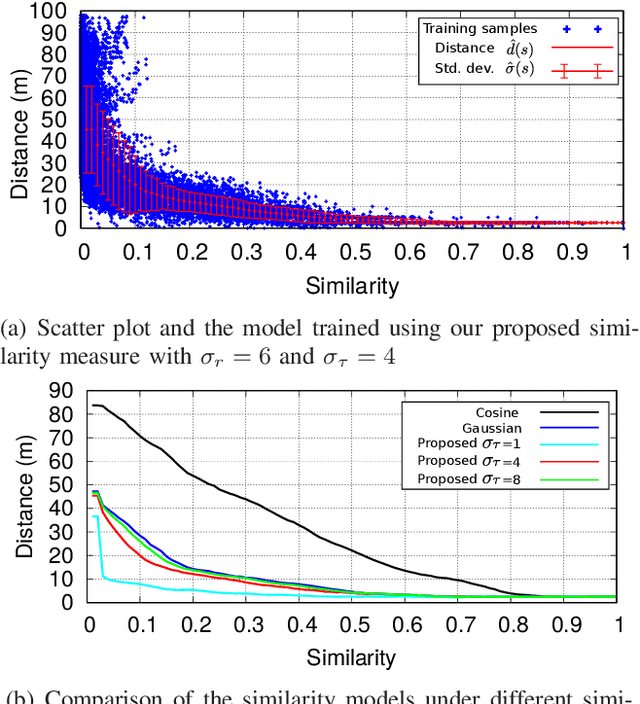

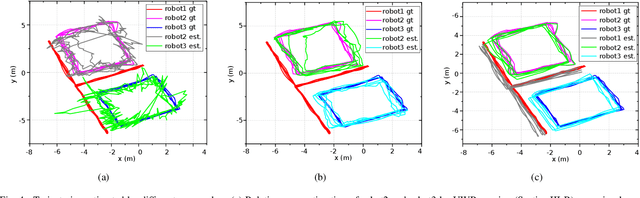
Simultaneous Localization and Mapping (SLAM) enables autonomous robots to navigate and execute their tasks through unknown environments. However, performing SLAM in large environments with a single robot is not efficient, and visual or LiDAR-based SLAM requires feature extraction and matching algorithms, which are computationally expensive. In this paper, we present a collaborative SLAM approach with multiple robots using the pervasive WiFi radio signals. A centralized solution is proposed to optimize the trajectory based on the odometry and radio fingerprints collected from multiple robots. To improve the localization accuracy, a novel similarity model is introduced that combines received signal strength (RSS) and detection likelihood of an access point (AP). We perform extensive experiments to demonstrate the effectiveness of the proposed similarity model and collaborative SLAM framework.
Relative Localization of Mobile Robots with Multiple Ultra-WideBand Ranging Measurements
Jul 30, 2021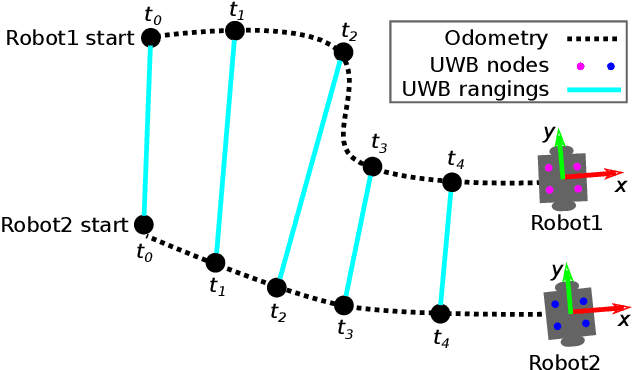

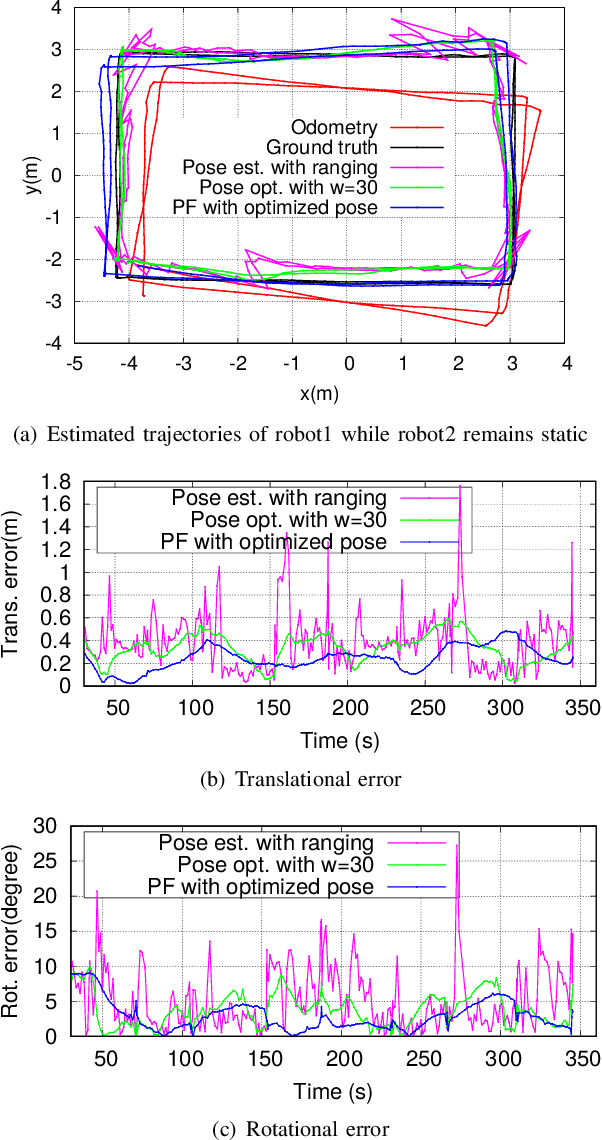
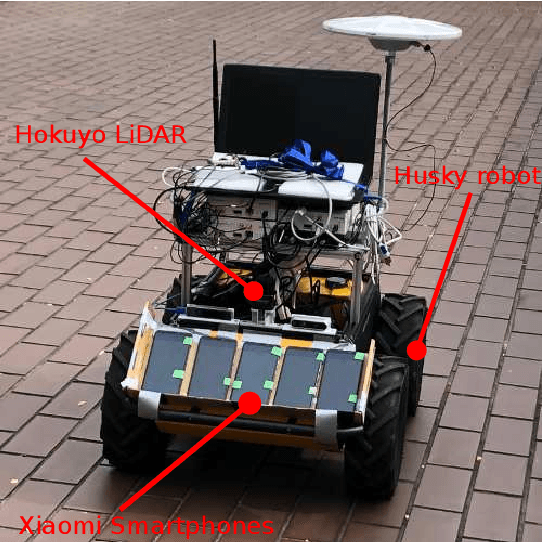
Relative localization between autonomous robots without infrastructure is crucial to achieve their navigation, path planning, and formation in many applications, such as emergency response, where acquiring a prior knowledge of the environment is not possible. The traditional Ultra-WideBand (UWB)-based approach provides a good estimation of the distance between the robots, but obtaining the relative pose (including the displacement and orientation) remains challenging. We propose an approach to estimate the relative pose between a group of robots by equipping each robot with multiple UWB ranging nodes. We determine the pose between two robots by minimizing the residual error of the ranging measurements from all UWB nodes. To improve the localization accuracy, we propose to utilize the odometry constraints through a sliding window-based optimization. The optimized pose is then fused with the odometry in a particle filtering for pose tracking among a group of mobile robots. We have conducted extensive experiments to validate the effectiveness of the proposed approach.
DEVI: Open-source Human-Robot Interface for Interactive Receptionist Systems
Jan 02, 2021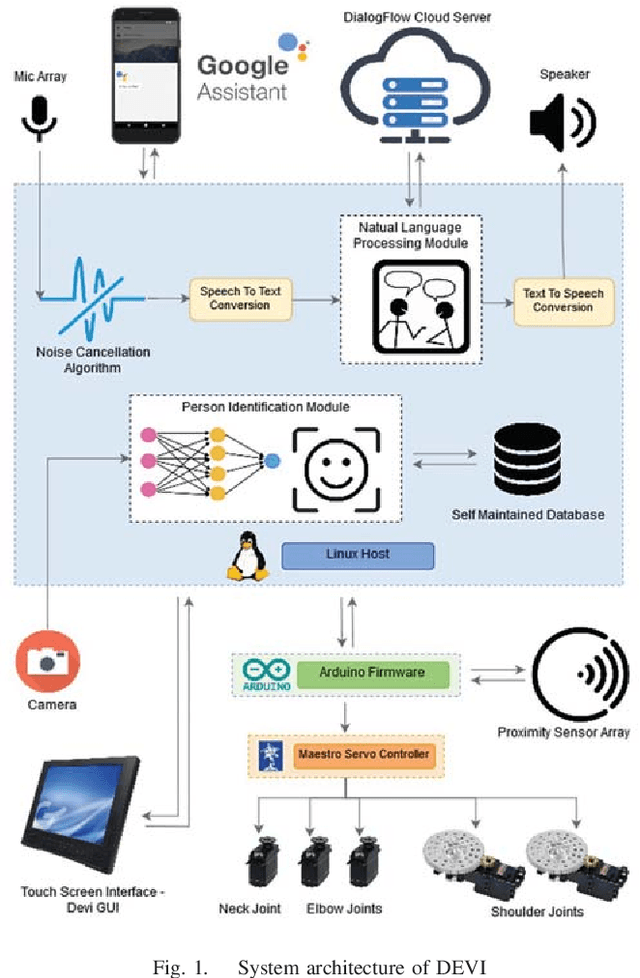
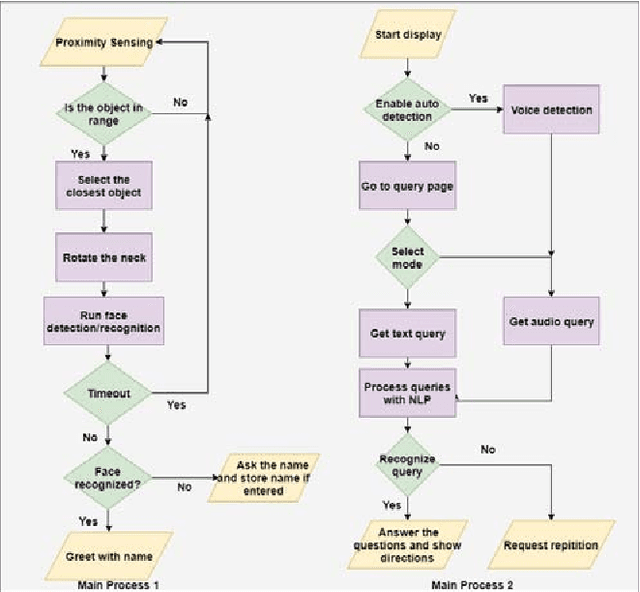
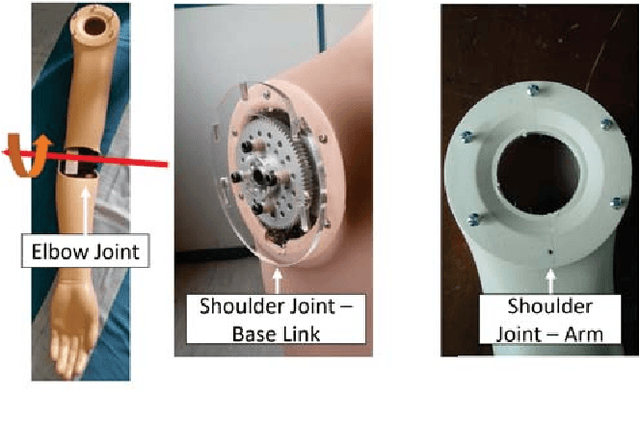
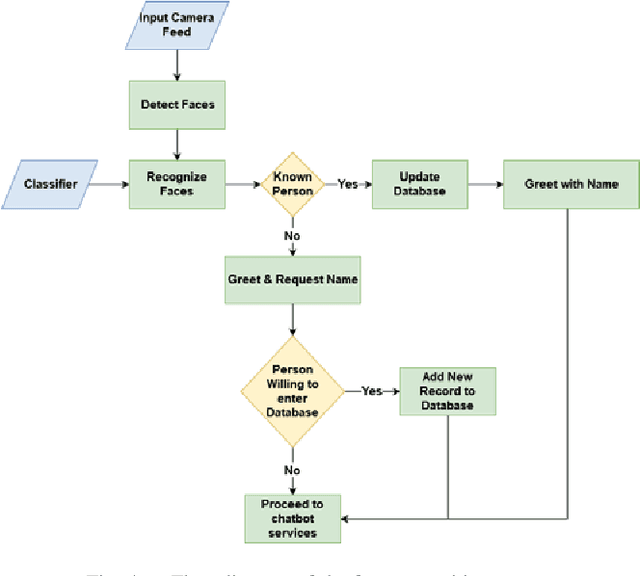
Humanoid robots that act as human-robot interfaces equipped with social skills can assist people in many of their daily activities. Receptionist robots are one such application where social skills and appearance are of utmost importance. Many existing robot receptionist systems suffer from high cost and they do not disclose internal architectures for further development for robot researchers. Moreover, there does not exist customizable open-source robot receptionist frameworks to be deployed for any given application. In this paper we present an open-source robot receptionist intelligence core -- "DEVI"(means 'lady' in Sinhala), that provides researchers with ease of creating customized robot receptionists according to the requirements (cost, external appearance, and required processing power). Moreover, this paper also presents details on a prototype implementation of a physical robot using the DEVI system. The robot can give directional guidance with physical gestures, answer basic queries using a speech recognition and synthesis system, recognize and greet known people using face recognition and register new people in its database, using a self-learning neural network. Experiments conducted with DEVI show the effectiveness of the proposed system.